手术机器人中手术刀具的标定方法和标定系统
- 国知局
- 2024-07-12 10:20:02
本发明涉及医疗器械领域,尤其涉及一种手术机器人中手术刀具的标定方法和标定系统。
背景技术:
1、下颌骨是面部下三分之一的骨性支架,同时为面部唯一具有运动功能的骨,其特有的形态是个体形貌特征与行使正常功能的基础。若因疾病或事故等原因,致使患者的下颌骨的形状和功能遭到破坏,导致患者面部外观畸形以及说话咬合咀嚼等功能受到不同程度的影响,这时便需要进行下颌骨重建治疗。
2、在颌骨重建手术中,传统上是由医生手持电锯等手术刀具人工去切割腓骨,但是电锯工作过程中存在较大的震动,且医生会存在手抖的情况,因此依靠医生去手动截骨在截骨精度上存在着不稳定性,且在腓骨周围存在许多血管,切割过程中医生在操控电锯的同时,要长时间保持专注,保证对周围血管不造成损伤。随着机器人技术的发展,机器人逐渐被应用,业界也提供有专门的腓骨手术机器人,在手术过程中,由医生借助腓骨手术机器人进行腓骨移植手术操作,解决现有相关技术中单纯由医生操控手术刀具存在精度不稳定、体力及精神无法长时间保持专注等问题,获得了良好的手术治疗效果。
3、所述腓骨手术机器人的末端设有手术刀具,为了准确控制手术刀具运动的位置与姿态,需要对手术刀具所在坐标系进行标定。目前针对机器人工具标定多是采用四点法或七点法,以四点法为例,在该方法的标定过程中,操作者操作手术刀具的姿态,以四个姿态使得手术刀具的尖端与空间内的固定点重合,利用相关的坐标约束关系,实现手术刀具坐标系位置的标定。但是这种标定方式不仅操作繁琐且整体标定精度较低,特别地,仅限于末端为点状的手术刀具或者刀具姿态已知的手术刀具,而对于截骨刀片这类面状工具,需要同时标定手术根据相对机器人末端的位置与姿态,具有较大的难度。
技术实现思路
1、有鉴于现有技术的上述缺陷或不足,本发明在于公开一种手术机器人,用于解决现有相关采用多点标定法的技术中标定对向受限、操作繁琐、以及整体标定精度较低等问题。
2、为实现上述目的,本发明公开一种手术机器人中手术刀具的标定方法,所述手术刀具设于手术机器人末端,所述手术刀具的标定方法包括如下步骤:
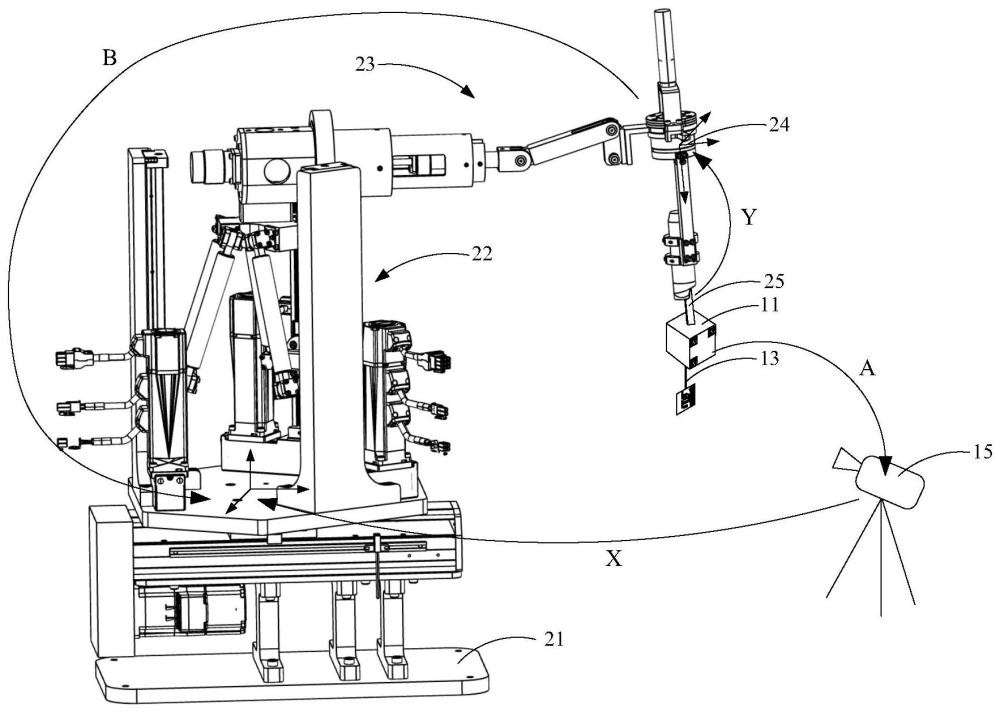
3、提供标定块、探针、以及相机,所述标定块设有刀片槽和与所述刀片槽相通的探针插孔,在所述标定块的标定面上设置至少一第一标签,在所述探针的第一端设有一第二标签;通过刀片槽将所述标定块与所述手术刀具安装连接,使用相机识别所述标定块上的至少一第一标签的坐标信息以得到所述手术刀具相对相机的旋转矩阵;将所述探针插入所述标定块的探针插孔,使用相机识别所述探针上的第二标签的坐标信息以得到手术刀具在相机空间内的平移向量;根据所述手术刀具相对相机的旋转矩阵和所述手术刀具在相机空间内的平移向量,得到所述手术刀具相对相机的变换矩阵;
4、获得所述手术机器人相对手术机器人末端的变换矩阵和所述相机相对所述手术机器人的变化矩阵;以及
5、根据所述手术刀具相对相机的变换矩阵、所述相机相对所述手术机器人的变化矩阵、以及所述手术机器人相对手术机器人末端的变换矩阵,得到手术刀具坐标系与机器人末端坐标系的位姿关系。
6、在本发明的较佳实施方式中,所述通过刀片槽将所述标定块与所述手术刀具安装连接,使用相机识别所述标定块上的至少一第一标签的坐标信息以得到所述手术刀具相对相机的旋转矩阵,包括如下步骤:将所述手术刀具插入到所述标定块的刀片槽内,使得所述标定块与所述手术刀具安装连接,构建手术刀具坐标系;其中,所述标定块中标定面上的至少一第一标签与所述手术刀具的刀面平行,使得所述至少一第一标签的坐标系与所述手术刀具坐标系一致;使用相机识别所述标定块上的至少一第一标签,获得所述至少一第一标签的坐标信息;根据所述至少一第一标签的坐标信息,得到所述手术刀具的刀面平面相对相机的旋转矩阵。
7、在本发明的较佳实施方式中,所述构建手术刀具坐标系包括:将手术刀具的刀面设为由x轴和y轴构成的平面,将垂直所述手术刀具的刀面的方向设为z轴,其中,手术刀具的操作方向为x轴,所述y轴与x轴垂直;所述探针插孔的方向与所述x轴一致。
8、在本发明的较佳实施方式中,所述将所述探针插入所述标定块的探针插孔,使用相机识别所述探针上的第二标签的坐标信息以得到手术刀具在相机空间内的平移向量,包括如下步骤:将探针插入所述标定块的探针插孔直至所述探针的第二端与所述手术刀具的刀刃的中心点接触;使用相机识别所述探针的第一端上的第二标签,获得所述第二标签的坐标信息;根据所述第二标签的坐标信息以及所述第二标签与所述探针的第二端的关系和所述探针的第二端与所述刀刃中心点的关系,得到手术刀具的刀刃中心点在相机空间内的平移向量。
9、在本发明的较佳实施方式中,所述相机相对所述手术机器人的变化矩阵是通过手眼标定方式得到的;所述手术机器人相对手术机器人末端的变换矩阵是通过机器人正解方式得到的。
10、本发明公开一种手术机器人中手术刀具的标定系统,所述手术刀具设于手术机器人末端,所述手术刀具的标定系统包括:
11、标定块,所述标定块设有刀片槽和与所述刀片槽相通的探针插孔,通过刀片槽将所述标定块与所述手术刀具安装连接,在所述标定块的标定面上设置至少一第一标签;
12、探针,所述探针的第一端设有一第二标签,所述探针的第二端插入所述标定块的探针插孔内;
13、相机,用于识别所述标定块上的至少一第一标签的坐标信息以得到所述手术刀具相对相机的旋转矩阵和识别所述第二标签的坐标信息以得到手术刀具在相机空间内的平移向量,从而得到所述手术刀具相对相机的变换矩阵。
14、在本发明的较佳实施方式中,在将所述手术刀具插入到所述标定块的刀片槽内后,所述标定块中标定面上的至少一第一标签与所述手术刀具的刀面平行,使得所述至少一第一标签的坐标系与所述手术刀具坐标系一致。
15、在本发明的较佳实施方式中,在所述构建手术刀具坐标系中,将手术刀具的刀面设为由x轴和y轴构成的平面,将垂直所述手术刀具的刀面的方向设为z轴,其中,手术刀具的操作方向为x轴,所述y轴与x轴垂直;所述探针插孔的方向与所述x轴一致。
16、在本发明的较佳实施方式中,在将探针的第二端插入所述标定块的探针插孔内后,所述探针的第二端与所述手术刀具的刀刃的中心点接触。
17、本发明公开一种一种手术刀具辅助标定装置,所述手术刀具辅助标定装置与相机配合以执行前述的手术刀具的标定方法,所述手术刀具辅助标定装置包括:
18、标定块,所述标定块设有刀片槽和与所述刀片槽相通的探针插孔,通过刀片槽将所述标定块与所述手术刀具安装连接,在所述标定块的标定面上设置至少一第一标签;以及
19、探针,所述探针的第一端设有一第二标签,所述探针的第二端插入所述标定块的探针插孔内。
20、本发明公开一种手术机器人中手术刀具的标定方法和标定系统,相较于现有技术,本发明手术机器人中手术刀具的标定方法和标定系统至少具有如下技术效果:通过提供标定块和探针,所述标定块设有刀片槽和探针插孔,如此,可将探针、标定块和手术刀具安装连接在一起并建立对应的坐标关系,如此,一方面利用相机识别标定块上的至少一第一标签的坐标信息以得到手术刀具相对相机的旋转矩阵,另一方面利用识别探针上的第二标签的坐标信息以得到手术刀具在相机空间内的平移向量,从而得到所述手术刀具相对相机的变换矩阵,再结合所述相机相对所述手术机器人的变化矩阵、以及所述手术机器人相对手术机器人末端的变换矩阵,以间接方式得到手术刀具与机器人末端的位姿关系,实现精准标定。
21、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
本文地址:https://www.jishuxx.com/zhuanli/20240615/86271.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
牙种植清洗套的制作方法
下一篇
返回列表