印刷方法和机器人系统与流程
- 国知局
- 2024-07-05 16:04:13
本发明涉及印刷方法和机器人系统。
背景技术:
1、已知将多个可动部的动作组合后使喷墨打印头移动并对立体物的表面进行印刷的立体物印刷装置。
2、例如,在专利文献1中公开了对三维对象物进行印刷的系统,并且该系统具备关节臂机器人、印刷头、配置在它们之间的压电致动器、以及掌握印刷点的位置的检测器。机器人构成为使印刷头沿着对象物的表面移动。由此,能够以包括相互相邻的印刷轨道的多路径进行印刷。
3、另外,在专利文献1中公开了压电致动器使印刷头相对于机器人进行相对运动。并且,在专利文献1中公开了如下内容:在使用该系统使印刷头按相互相邻的2个印刷轨道移动的同时以多路径进行印刷时,掌握第一印刷轨道的印刷点的实际位置、算出目标位置与实际位置的偏移、以及在第二印刷轨道中进行补偿运动以消除所述偏移。由此,得以抑制印刷路径彼此的偏移,能够印刷没有错误的图像。
4、另一方面,机器人伴随着动作而产生振动。该振动成为使喷墨打印头以规定的时间周期摇动的原因。因此,例如,在使喷墨打印头以直线状对印刷对象物进行扫描的同时喷出了墨的情况下,所印刷的图像也成为伴随着规定的距离周期的起伏的图像。不过,该起伏由于是使整个头摇动,因此局部的画质下降较少。因而,有时允许图像的起伏或者一边使用别的手段校正起伏,一边使用。
5、专利文献1:日本特开2013-202781号公报
6、但是,在喷墨打印头具有多个喷嘴列的情况下,上述的起伏成为局部的画质下降的原因。例如,在从2个喷嘴列喷出不同颜色的墨的情况下,按每种颜色从不同的喷嘴列喷出墨。喷嘴列在头内配置在相互分开的位置。因此,喷嘴列与机器人的位置关系按每种颜色而不同。于是,当使喷嘴列移动到相对于印刷对象物的目标位置时,机器人的姿态按每种颜色而不同。其结果是,产生起伏的相位按每种颜色而不同这一现象。该现象成为墨的滴落位置从原来的位置偏移的原因。其结果是,发生点的位置偏移、颜色不匀、颜色偏差等印刷不良。
7、因而,实现在具有多个喷嘴列的喷墨打印头伴随着摇动的同时进行印刷动作的情况下也将印刷不良抑制为较少的印刷方法成为问题。
技术实现思路
1、本发明的应用例涉及的印刷方法是使用喷墨头和机器人在所述机械臂使所述喷墨头扫描的同时所述喷墨头喷出墨并对对象物进行印刷的印刷方法,
2、所述喷墨头具有由喷出墨的多个喷嘴构成的第一喷嘴列和第二喷嘴列,
3、所述机器人具备:机械臂,当将所述第一喷嘴列和所述第二喷嘴列排列的方向设为扫描方向时,使所述喷墨头相对于所述对象物在所述扫描方向上扫描;以及线性工作台,使所述喷墨头相对于所述对象物相对地移动,
4、所述印刷方法包括:
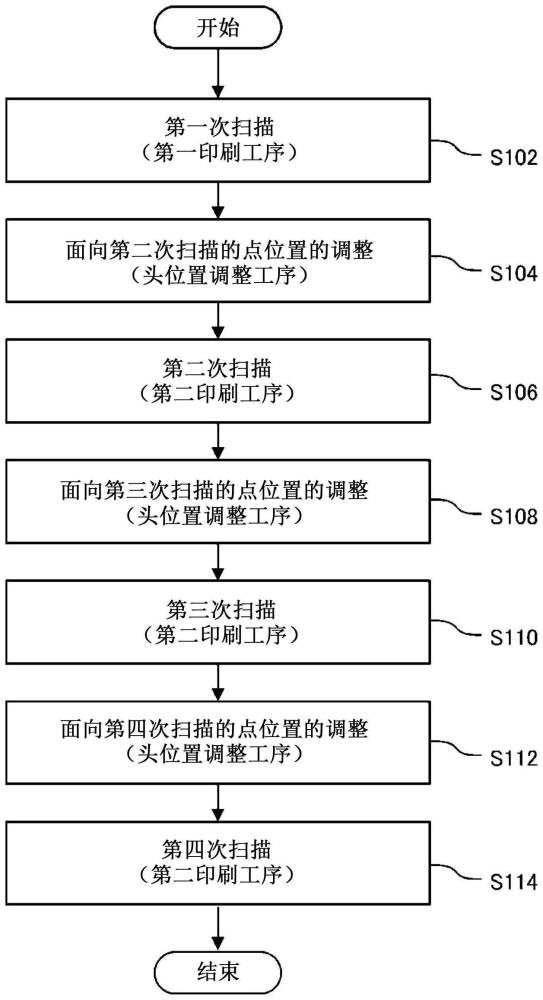
5、第一印刷工序,在所述机械臂的前端相对于基端的相对位置位于规定位置的状态下,在所述机械臂使所述喷墨头相对于所述对象物相对地扫描的同时,从所述第一喷嘴列喷出墨,对所述对象物进行第一印刷;
6、头位置调整工序,在所述第一印刷工序之后,所述线性工作台以如下方式使所述喷墨头相对于所述对象物相对地移动:所述第二喷嘴列配置在与所述第一印刷时的所述第一喷嘴列相同的位置,并且所述机械臂的所述前端的相对位置成为所述规定位置;以及
7、第二印刷工序,在所述头位置调整工序之后,在所述机械臂使所述喷墨头按与所述第一印刷时相同的扫描轨道对所述对象物相对地进行扫描的同时,从所述第二喷嘴列喷出墨来对所述对象物进行第二印刷。
8、本发明的应用例涉及的机器人系统具备:
9、喷墨头,具有由喷出墨的多个喷嘴构成的第一喷嘴列和第二喷嘴列;
10、机器人,具备当将所述第一喷嘴列和所述第二喷嘴列排列的方向设为扫描方向时使所述喷墨头相对于对象物在所述扫描方向上扫描的机械臂以及使所述喷墨头相对于所述对象物相对地移动的线性工作台;以及
11、控制装置,控制所述机器人的动作,
12、所述控制装置执行:
13、第一印刷动作,从所述机械臂的前端相对于基端的相对位置位于规定位置的状态起,在所述机械臂使所述喷墨头对所述对象物相对地进行扫描的同时,从所述第一喷嘴列喷出墨,进行针对所述对象物的目标位置的第一印刷;
14、头位置调整动作,在所述第一印刷动作之后,所述线性工作台以如下方式使所述喷墨头相对于所述对象物相对地移动:所述第二喷嘴列配置在与所述第一印刷时的所述第一喷嘴列相同的位置,并且所述机械臂的所述前端的相对位置成为所述规定位置;以及
15、第二印刷动作,在所述头位置调整动作之后,在所述机械臂使所述喷墨头按与所述第一印刷时相同的扫描轨道对所述对象物相对地进行扫描的同时,从所述第二喷嘴列喷出墨,进行针对所述对象物的所述目标位置的第二印刷。
技术特征:1.一种印刷方法,其特征在于,是使用喷墨头和机器人在机械臂使所述喷墨头扫描的同时所述喷墨头喷出墨并对对象物进行印刷的印刷方法,
2.根据权利要求1所述的印刷方法,其特征在于,
3.根据权利要求2所述的印刷方法,其特征在于,
4.根据权利要求2或3所述的印刷方法,其特征在于,
5.根据权利要求2或3所述的印刷方法,其特征在于,
6.一种机器人系统,其特征在于,具备:
技术总结本发明公开了在具有多个喷嘴列的喷墨头伴随着摇动的同时进行印刷动作的情况下也能将印刷不良抑制为较少的印刷方法和机器人系统。印刷方法是使用喷墨头和具备机械臂及线性工作台的机器人在机械臂使喷墨头扫描的同时进行印刷的印刷方法,其包括:在机械臂的前端相对于基端的相对位置位于规定位置的状态下,从第一喷嘴列喷出墨来进行第一印刷的工序;线性工作台以如下方式使喷墨头相对于对象物相对地移动,即第二喷嘴列配置在与第一印刷时的第一喷嘴列相同的位置,并且机械臂的前端的相对位置成为所述规定位置的工序;以及在机械臂使喷墨头按与第一印刷时相同的扫描轨道对对象物相对地扫描的同时进行第二印刷的工序。技术研发人员:佐藤佳织,须贝圭吾受保护的技术使用者:精工爱普生株式会社技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/40236.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表