一种自主巡检的空地协同智能消防系统
- 国知局
- 2024-07-05 16:54:19
本发明涉及智能消防系统,具体为一种自主巡检的空地协同智能消防系统。
背景技术:
1、随着社会经济发展,消防安全的重要性日益突出,对消防系统的稳定性和及时响应提出了更高的要求。现有技术中的痛点在于,火灾很难及时发现,以导致火灾初发时丧失最佳灭火时机,同时在复杂环境火灾街区发生火灾时,由于消防车在地面上的局限性,无法俯视全局,则无法快速规划处最佳行进路线,如此一旦耽误最佳的灭火时间,火势一旦燃起想要扑灭就是极为复杂的,如此容易给国家和人民的生命财产造成了极大的损失,火灾后果令人痛心。
2、因此为了保证火灾发生时灭火系统能够及时响应,正常工作,保证消防车可以正常行进,快速达到灭火位置,需要一种自主巡检的空地协同智能消防系统进行解决。
技术实现思路
1、本发明的目的在于提供一种自主巡检的空地协同智能消防系统,以解决上述背景技术中提出的问题。
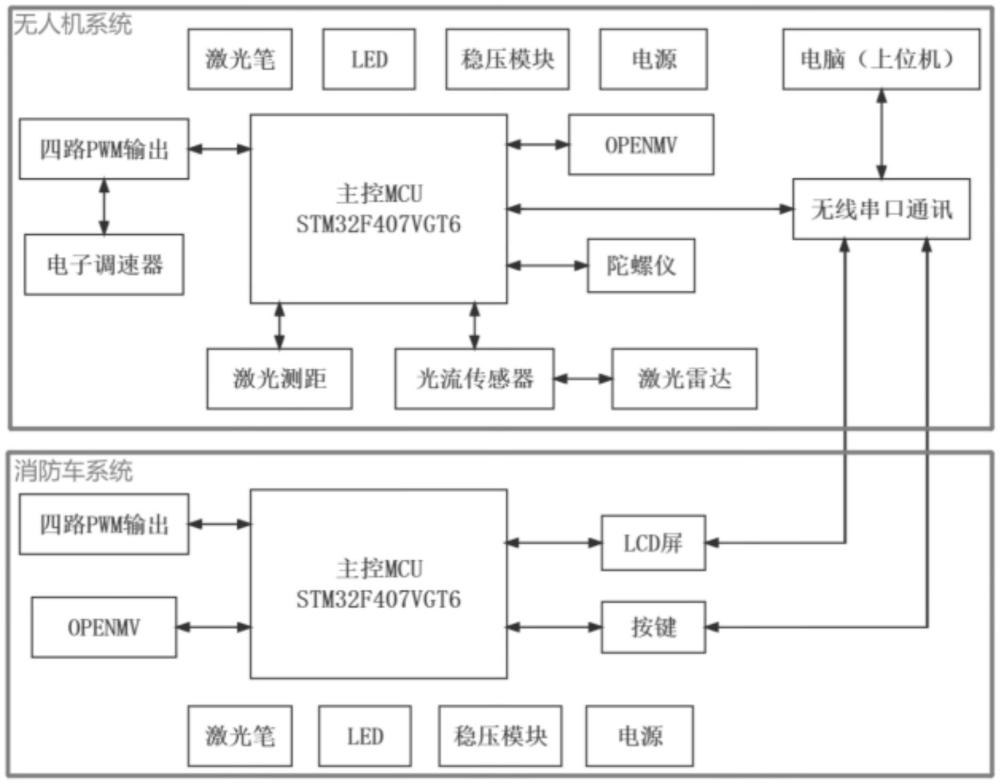
2、为实现上述目的,本发明提供如下技术方案:一种自主巡检的空地协同智能消防系统,包括无人机与消防车,所述无人机与消防车内部设置有智能消防系统,所述协同智能消防系统包括主控处理器、姿态控制模块、openmv视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块,所述无人机内部设置有飞行姿态控制模块、openmv视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块;所述消防车内部设置有openmv视觉模块、姿态控制模块、无线串口通讯模块、激光笔。
3、优选的,所述主控处理器的型号为stm32f407vgt6,所述主控处理器的主频为168mhz;通过stm32f407vgt6主控处理器可以为本系统提供优良的硬件支持。
4、优选的,所述姿态控制模块中设置有陀螺仪,其目的在于为了实现无人机的稳定自主飞行,需要形成姿态控制闭环回路,必须要有检测和反馈系统状态的传感器,包括无人机的姿态、角速率等信号,无人机对的飞行姿态控制器采用陀螺仪,其原始数据采用卡尔曼滤波算法、四元数算法处理可获取姿态信息,并通过stm32f4中的pid控制算法形成控制环以调整无人机的姿态与飞行动作。
5、优选的,所述无线串口通讯模块采用lora无线串口通讯模块;lora无线串口通讯模块用作无线通信模块,通信距离更远,能够穿透障碍物;无人机上的lora用于发送坐标信息,消防车上的lora用于接收坐标信息并将坐标在lcd显示屏上绘制。
6、优选的,所述无人机中有多个pid反馈控制环:所述pid反馈控制环包括有姿态控制环、垂直速度与高度控制环、水平位置控制环。
7、优选的,所述姿态控制环:三个平行的姿态控制环分别控制无人机的横滚角、俯仰角、偏航角;在无人机系统中,将无人机的俯仰角,翻滚角数据传输给openmv视觉模块,用于抵消视角倾斜的视野误差。
8、优选的,垂直速度与高度控制环:通过激光测距模块来测量对地高度作为控制反馈,控制环的输出为四个电机整体的油门控制量。
9、优选的,水平位置控制环:通过图像识别、激光雷达模块与光流传感器得到无人机位置作为控制反馈,输出控制量为横滚、俯仰两个水平方向控制量,给到姿态控制环中,控制无人机执行飞行动作。
10、与现有技术相比,本发明的有益效果是:
11、1、本发明利用四旋翼无人机和消防车的空地协同组成智能消防系统,能够对一定区域完成全覆盖巡逻并返回航迹,无人机发现火情后可将坐标信息发送给消防车,并往火源扔沙,消防车在收到火情坐标信息后前往火源,并熄灭火源,如此大大提高灭火效率,以减少火灾带来的灾害。
技术特征:1.一种自主巡检的空地协同智能消防系统,包括无人机与消防车,其特征在于:所述无人机与消防车内部设置有智能消防系统,所述协同智能消防系统包括主控处理器、姿态控制模块、openmv视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块,所述无人机内部设置有飞行姿态控制模块、openmv视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块;所述消防车内部设置有openmv视觉模块、姿态控制模块、无线串口通讯模块、激光笔。
2.根据权利要求1所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述主控处理器的型号为stm32f407vgt6,所述主控处理器的主频为168mhz。
3.根据权利要求1所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述姿态控制模块中设置有陀螺仪。
4.根据权利要求1所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述无线串口通讯模块采用lora无线串口通讯模块。
5.根据权利要求1所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述无人机中设置有多个pid反馈控制环;所述pid反馈控制环包括有姿态控制环、垂直速度与高度控制环、水平位置控制环。
6.根据权利要求5所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述姿态控制环:三个平行的姿态控制环分别控制无人机的横滚角、俯仰角、偏航角;在无人机系统中,将无人机的俯仰角,翻滚角数据传输给openmv视觉模块,用于抵消视角倾斜的视野误差。
7.根据权利要求5所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述垂直速度与高度控制环:通过激光测距模块来测量对地高度作为控制反馈,控制环的输出为四个电机整体的油门控制量。
8.根据权利要求5所述的一种自主巡检的空地协同智能消防系统,其特征在于:所述水平位置控制环:通过图像识别、激光雷达与光流传感器得到无人机位置作为控制反馈,输出控制量为横滚、俯仰两个水平方向控制量,给到姿态控制环中,控制无人机执行飞行动作。
技术总结本发明公开了一种自主巡检的空地协同智能消防系统,包括无人机与消防车,所述无人机与消防车内部设置有智能消防系统,所述协同智能消防系统包括主控处理器、姿态控制模块、OPENMV视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块,所述无人机内部设置有飞行姿态控制模块、OPENMV视觉模块、光流传感器模块、激光测距模块、激光雷达模块、无线串口通讯模块。本发明使用效果好,利用四旋翼无人机和消防车的空地协同组成智能消防系统,能够对一定区域完成全覆盖巡逻并返回航迹,无人机发现火情后可将坐标信息发送给消防车,并往火源扔沙,消防车在收到火情坐标信息后前往火源,并熄灭火源。技术研发人员:曾美琪,陈嘉明,闭周涛受保护的技术使用者:华南农业大学技术研发日:技术公布日:2024/1/25本文地址:https://www.jishuxx.com/zhuanli/20240617/45148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。