-
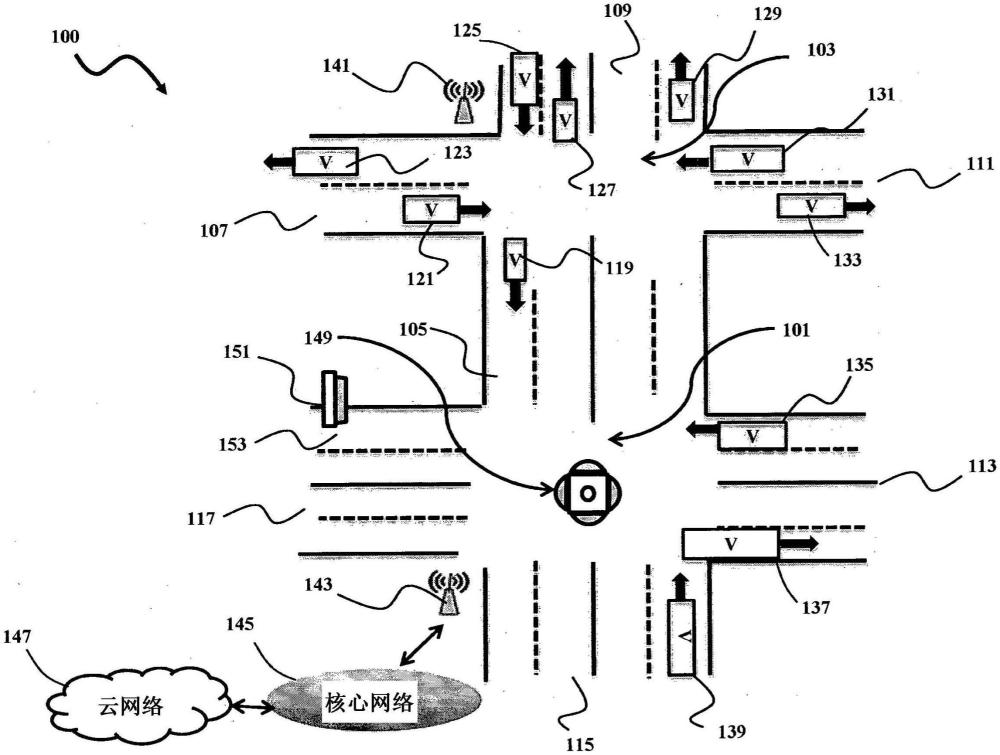
用于联合控制自主联网车辆(CAV)和手动联网车辆(MCV)的系统和方法与流程
本公开总体上涉及交通控制系统,更具体地涉及用于联合控制自主联网车辆(cav)和手动联网车辆(mcv)的系统和方法。背景技术:1、自动化交通系统(即使是部分自动化的情况)使得道路事故减少,交通网络得以有......
-
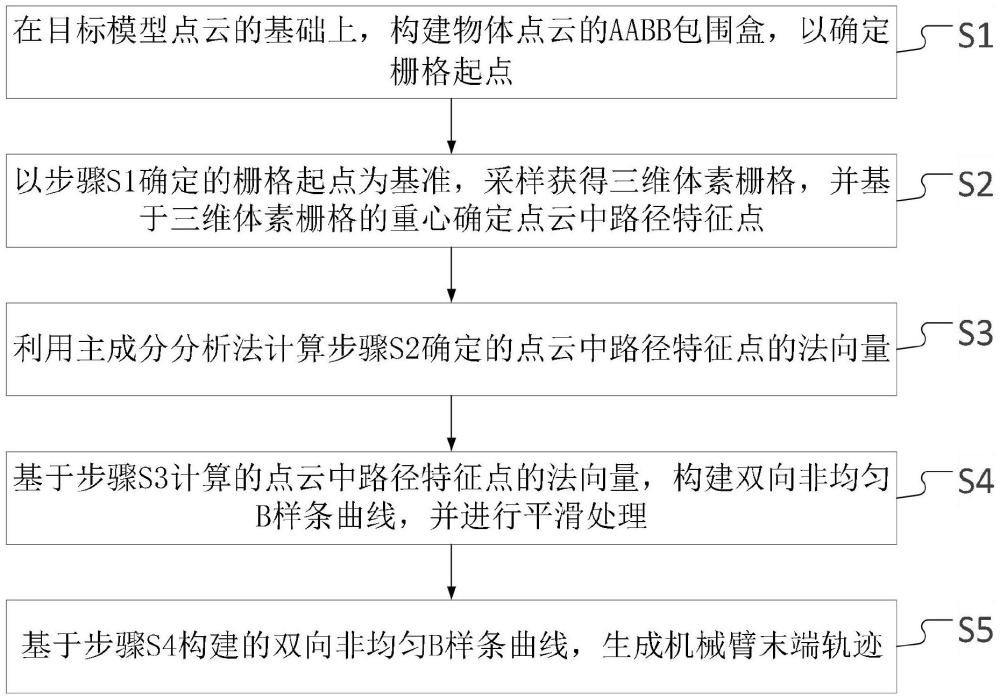
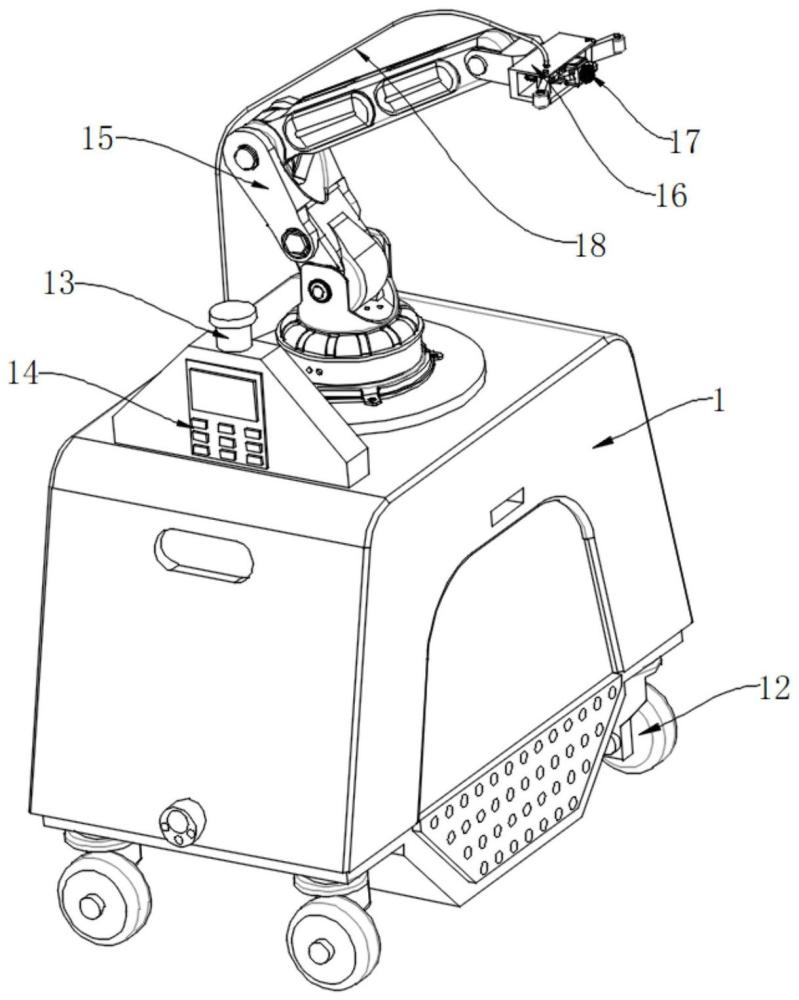
一种用于自主喷涂的机械臂末端轨迹规划方法
本发明涉及机械臂末端轨迹规划领域,尤其涉及一种用于自主喷涂的机械臂末端轨迹规划方法。背景技术:1、现有的机械臂喷涂轨迹规划方法主要分为主动式规划和被动式跟踪两种,其中,主动式规划方法大多基于预先绘制的......
-
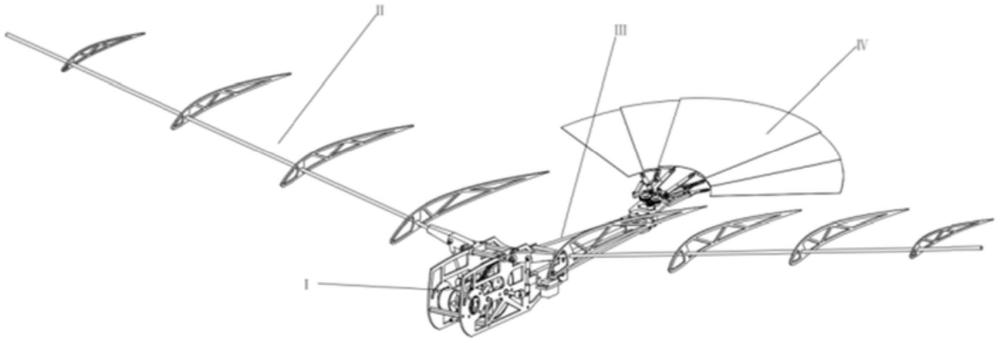
一种自主滑翔扑翼飞行器与控制方法
本发明涉及扑翼飞行器,具体是涉及一种自主滑翔扑翼飞行器与控制方法。背景技术:1、自然界中的鸟类在飞行过程中借助上升气流在空中盘旋上升和长时间的翱翔。仿鸟扑翼飞行器模仿鸟类飞行的方式,如果仿鸟扑翼飞行器......
-
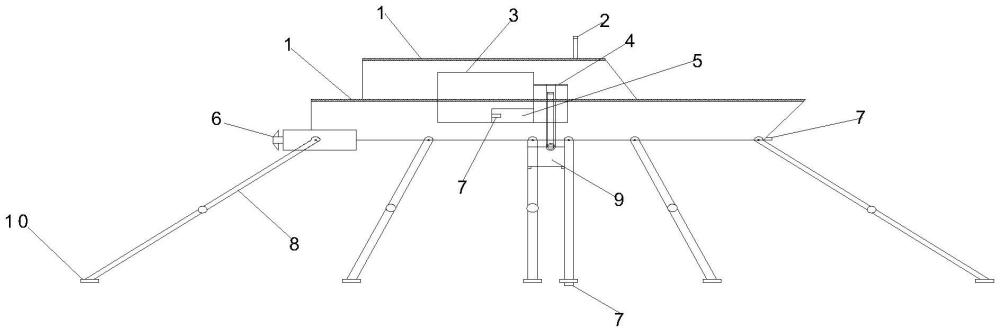
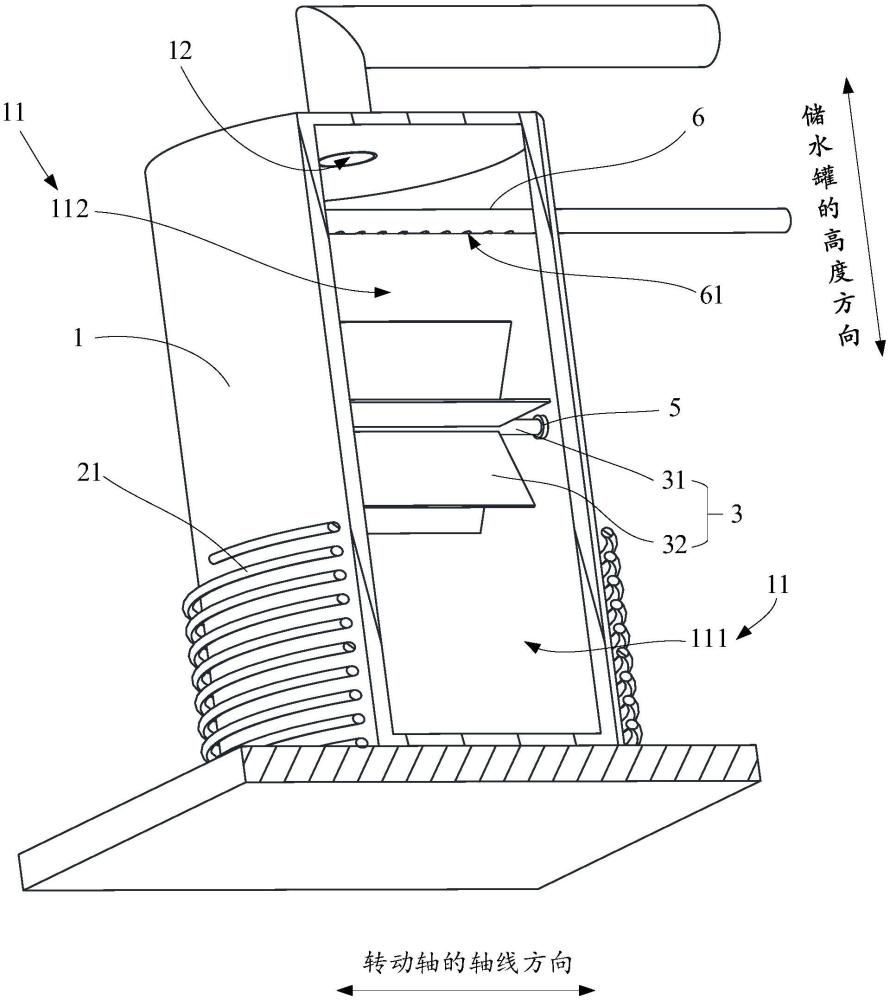
自主寻踪的交叉式曝气复氧系统及曝气复氧方法
本发明涉及自主寻踪的交叉式曝气复氧系统及曝气复氧方法,属于水处理领域。背景技术:1、我国城乡分布有大量的闸控河流、断头浜、湖泊、水塘等封闭、半封闭水体,其水流运动缓慢甚至静止,与外界物质交换能力微弱,......
-
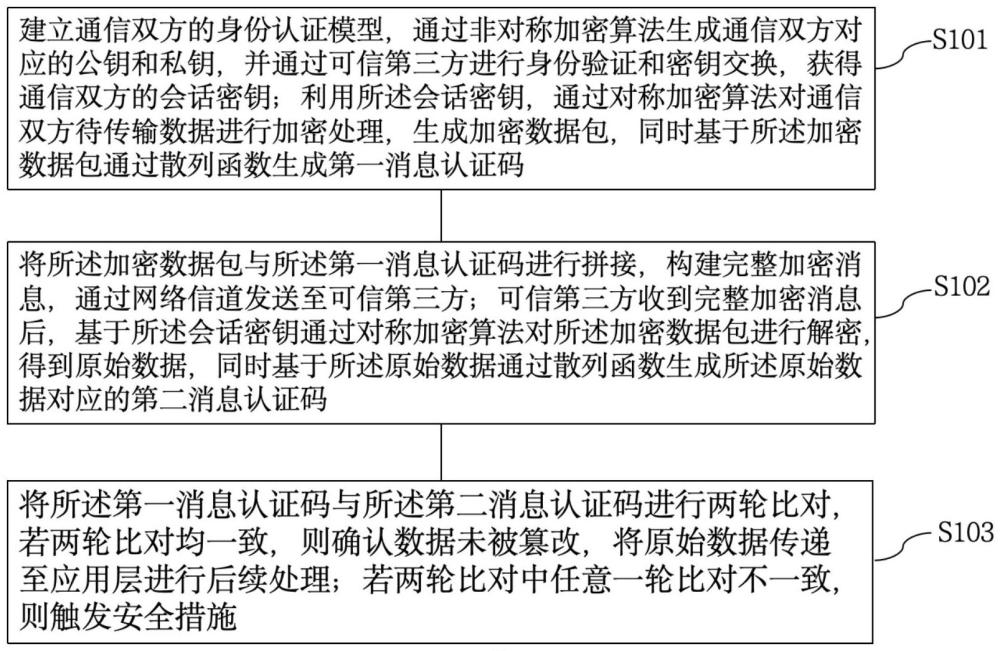
基于自主安全交互协议的数据安全传输方法及系统与流程
本发明涉及数据传输技术,尤其涉及基于自主安全交互协议的数据安全传输方法及系统。背景技术:1、随着互联网的快速发展和广泛应用,数据安全传输已成为现代信息社会中一个至关重要的问题。在各种在线服务、电子商务......
-
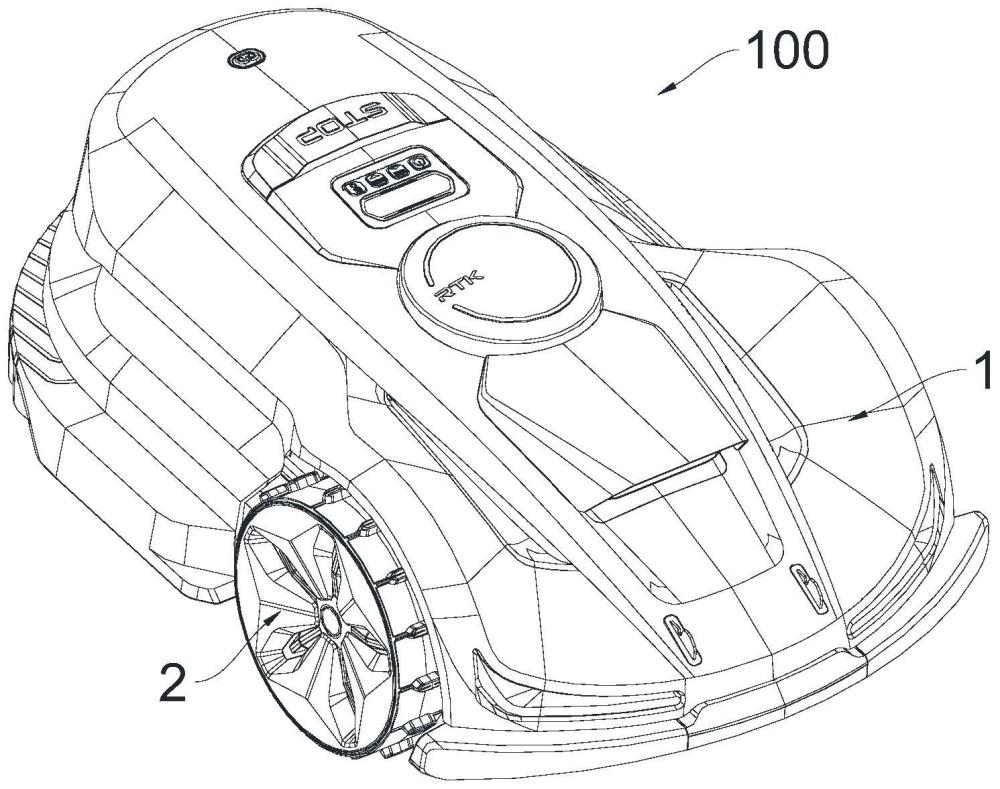
自主作业设备的制作方法
本发明涉及户外作业设备领域,特别涉及一种自主作业设备。背景技术:1、自主作业设备以主要功能为修剪草坪的割草机为例,可以使用户免于复杂和混杂的劳动,并且越来越受用户欢迎。自主作业设备能自动在预设的工作区......
-
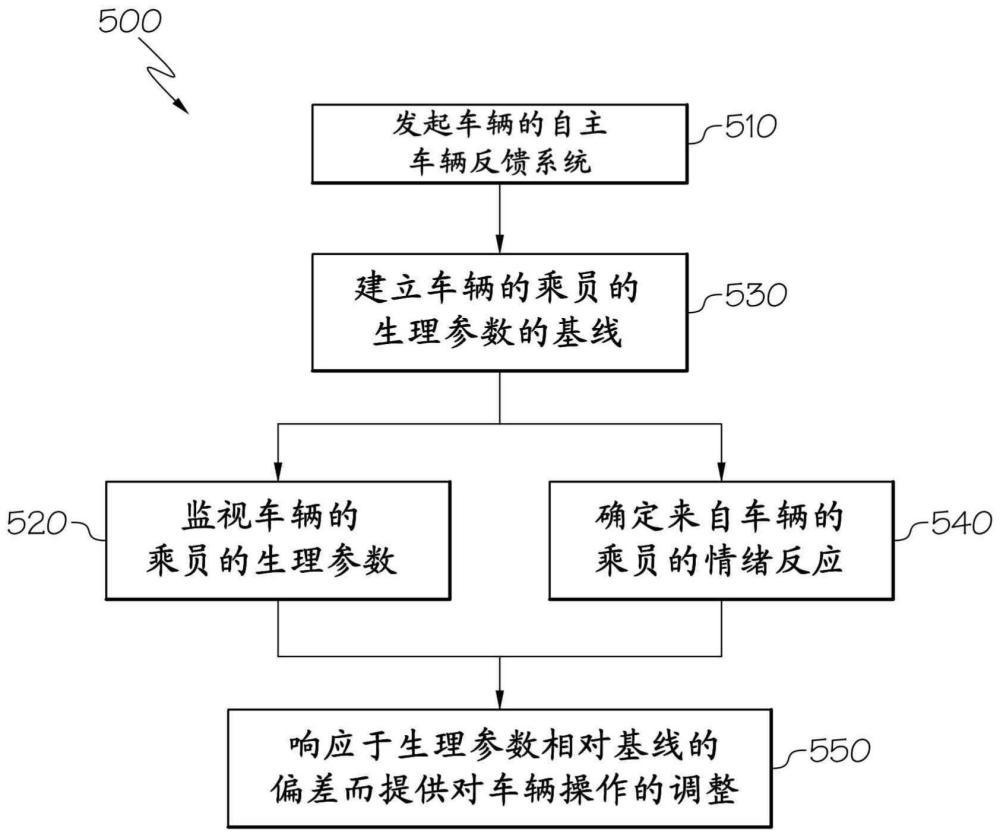
自主车辆反馈系统和操作自主车辆的方法与流程
本说明书一般而言涉及车辆反馈系统,并且更具体而言,涉及自主车辆反馈系统和操作自主车辆的方法。背景技术:1、自主车辆在现代交通系统中变得越来越普遍。这些车辆被设计为无需人类操作者即可操作,并依靠各种传感......
-

一种基于大型语言模型的自主无人车训练方法及系统
本发明属于自动驾驶和人工智能领域,涉及一种基于大型语言模型的自主无人车训练方法及系统。背景技术:1、强化学习作为一种关键的机器学习技术,在自动驾驶领域具有广阔的应用前景。目前,自主无人车导航面临的主要......
-
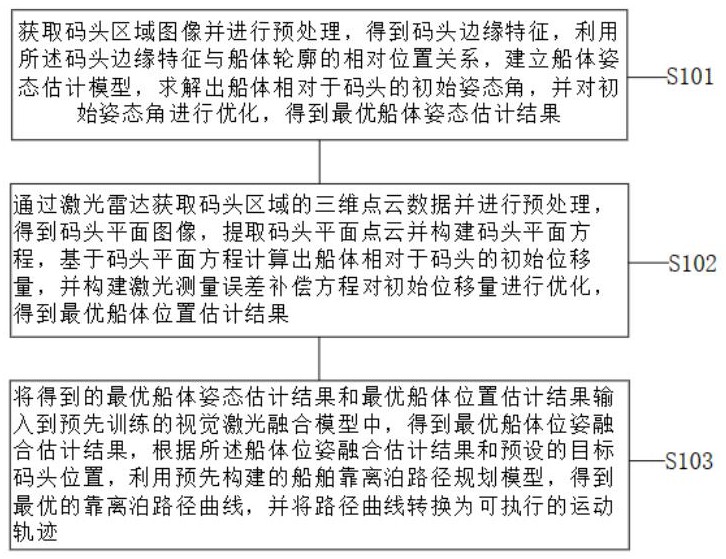
基于视觉激光融合的无人船自主靠离泊方法及系统与流程
本发明涉及图像处理技术,尤其涉及一种基于视觉激光融合的无人船自主靠离泊方法及系统。背景技术:1、船舶自动靠离泊是码头作业自动化的重要环节之一,对于提高港口运营效率、减少人工操作风险具有重要意义。传统的......
-

无人驾驶车自主安全运动速度的有限时间稳定控制方法
本发明涉及无人驾驶车的控制,尤其是关于无人驾驶车自主安全运动速度的有限时间稳定控制方法。背景技术:1、随着车辆工业的快速发展,汽车已经逐渐成为人们出行的重要交通工具,不过也给人们的生命安全和道路拥堵带......
-
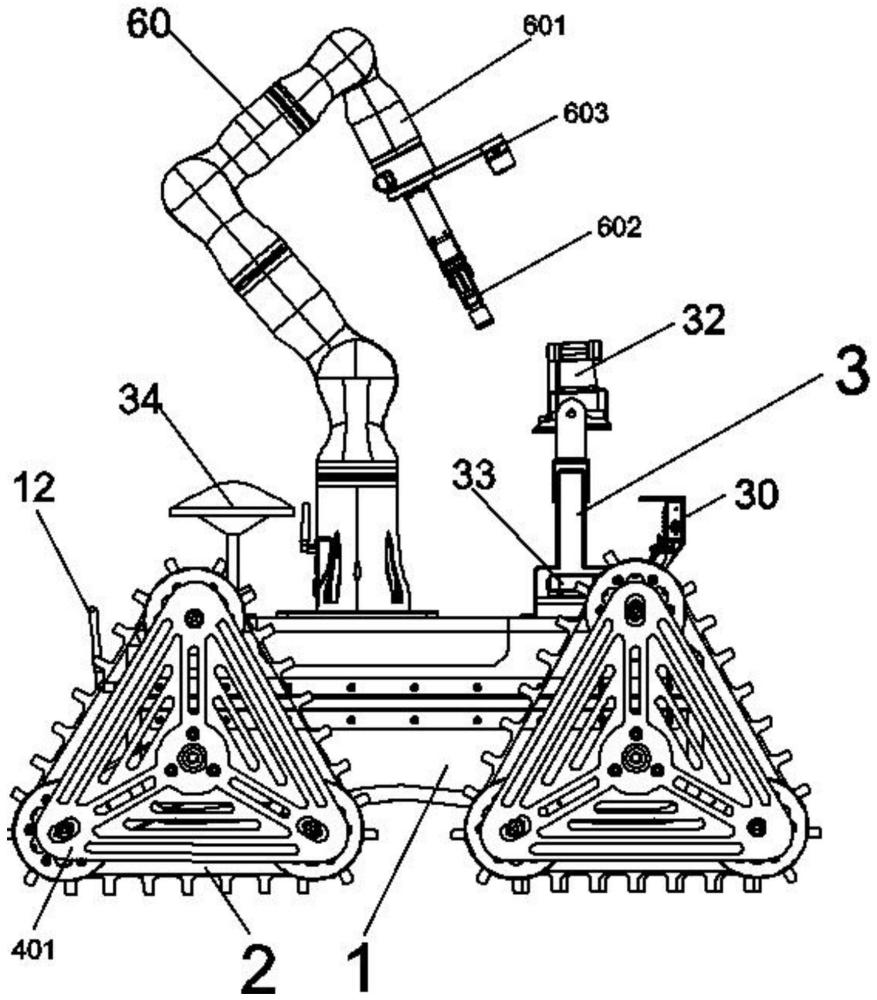
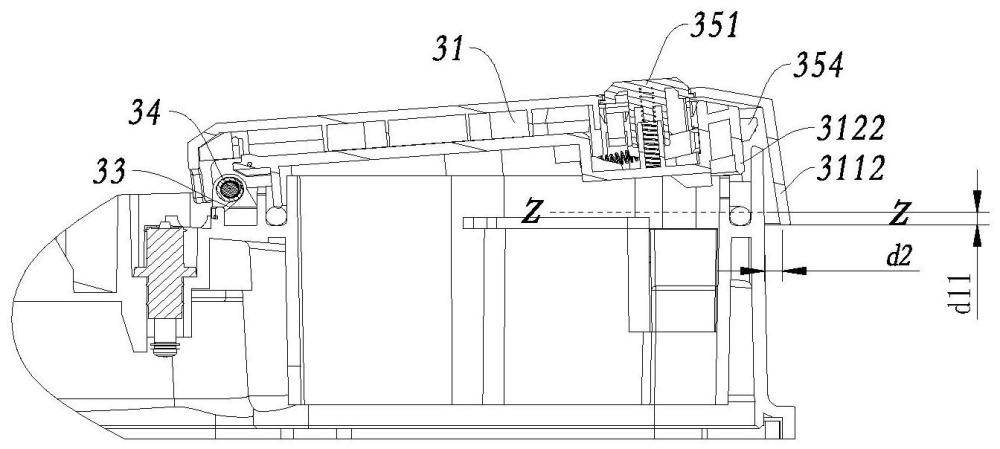
一种自主建图导航的履带式机器人
本技术涉及机器人,尤其涉及一种自主建图导航的履带式机器人。背景技术:1、随着自动化和智能化技术的发展,机器人在室外环境中的应用变得越来越广泛,如在地理勘测、农业监测、环境监测和救灾等领域均开始使用机器......
-
一种自主作业设备的制作方法
本发明涉及机器人领域,具体地涉及一种诸如自动割草机器人等的自主作业设备。背景技术:1、自主作业设备尤其是可自主地在预设区域内移动并执行特定作业的机器人,典型的如执行清洁作业的智能扫地机/吸尘器,或执行......
-
一种具有光热自主调控功能的恒压COB封装设备的制作方法
本发明涉及cob封装,具体为一种具有光热自主调控功能的恒压cob封装设备。背景技术:1、cob封装全称板上芯片封装,是为了解决led散热问题的一种技术,是将裸芯片用导电或非导电胶粘附在互连基板上,然后......
-
一种预应力自主提升施工核心装备及施工方法与流程
本发明涉及预应力施工领域,尤其涉及一种预应力自主提升施工核心装备及施工方法。背景技术:1、对于采用预应力挂索施工的工程,需要将预应力拉索吊运至高处,例如,风电塔筒中加固塔筒的竖向预应力的挂索施工工艺,......
-
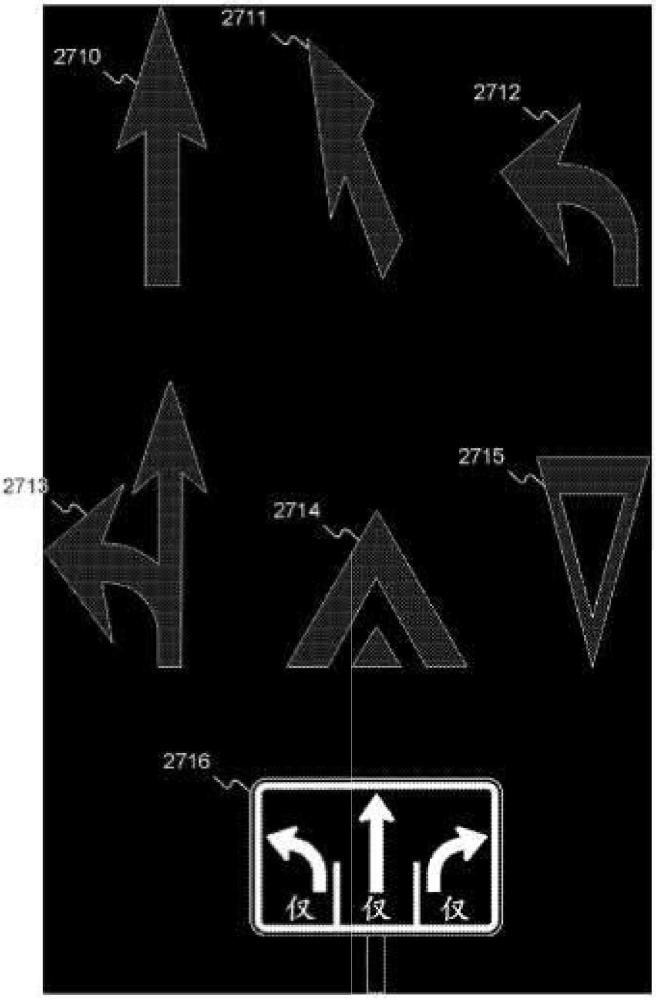
用于自主车辆导航的系统和方法与流程
本公开总体上涉及自主车辆导航。背景技术:1、随着技术的不断进步,能够在道路上导航的完全自主车辆的目标即将出现。自主车辆可能需要考虑各种各样的因素,并且基于那些因素做出适当的决定,以安全和准确地到达意图......
-

一种基于数字孪生的露天矿自主采矿系统
本申请涉及自主采矿,尤其涉及一种基于数字孪生的露天矿自主采矿系统。背景技术:1、近年来,采矿业作为国民经济的支柱之一,迎来了自主采矿系统的逐渐普及。在这一趋势中,各种自主采矿系统应运而生,这些创新性系......
-
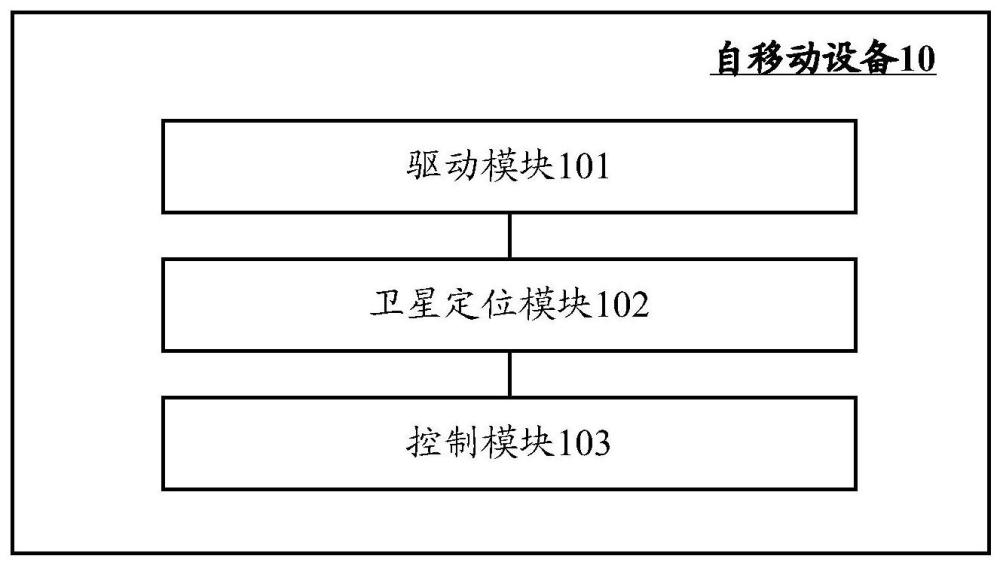
自移动设备及控制方法、自主工作系统与流程
本公开涉及自移动设备的控制,具体涉及一种自移动设备及控制方法、自主工作系统。背景技术:1、随着科学技术的发展,具备自动行驶功能的自移动设备被广泛使用,例如,自动割草机、自动扫雪机等。自移动设备能够按照......
-
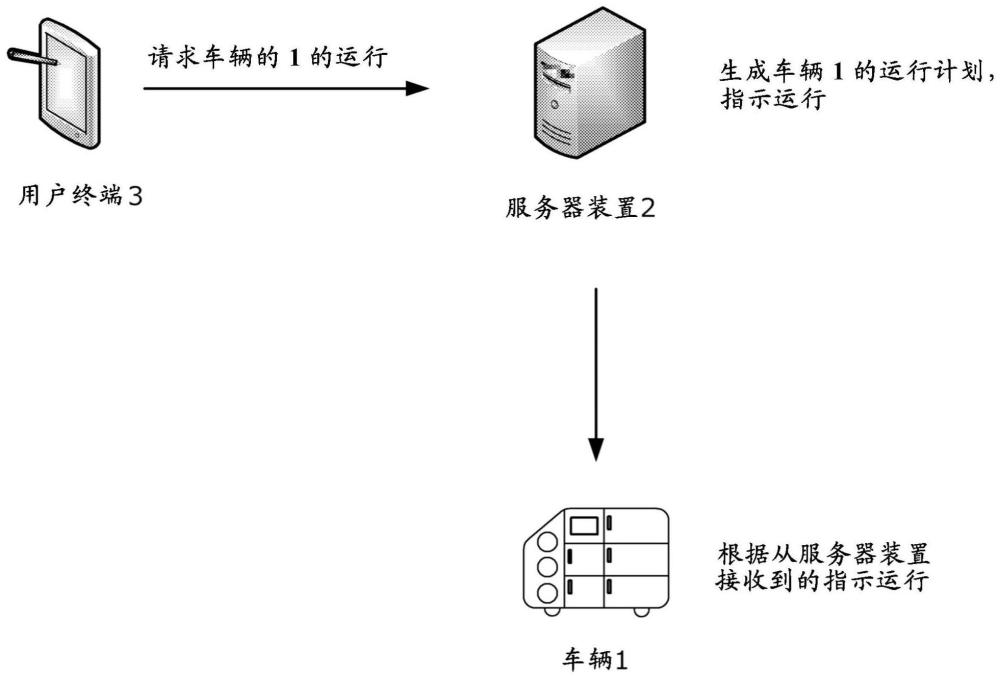
自主移动体以及车辆系统的制作方法
本公开涉及利用车辆寄存物品的寄存服务。背景技术:1、尝试通过派遣面向各种用途设计的自动驾驶车来提供服务。例如,在专利文献1中,公开了与通过运行搭载有投币式储物柜的自动驾驶车来能够在各种场所存入以及取出......
-
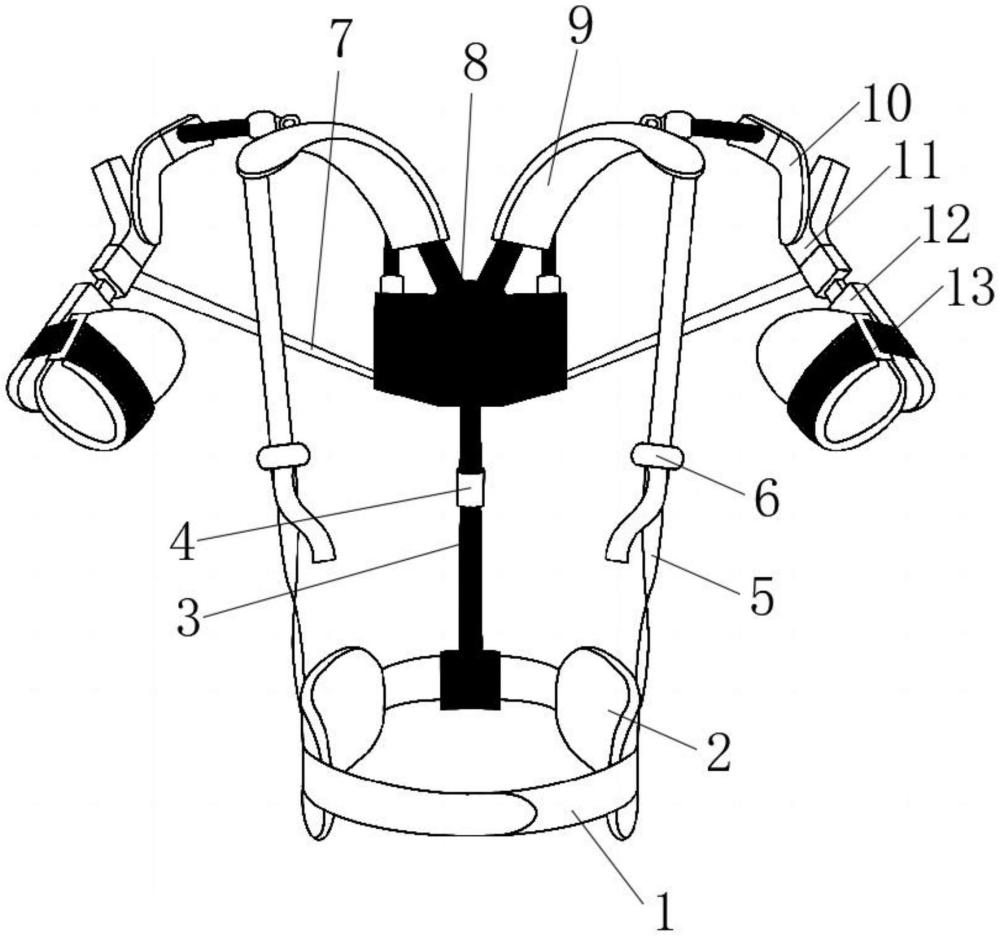
一种辅助肩关节自主康复的训练工具
本发明涉及医疗器械,具体涉及一种辅助肩关节自主康复的训练工具。背景技术:1、肩关节进行手术后,其脱位复发率较高,且会引起其他并发症的产生。因此需要通过肩颈训练工具帮助患者进行康复训练。2、例如中国专利......
-
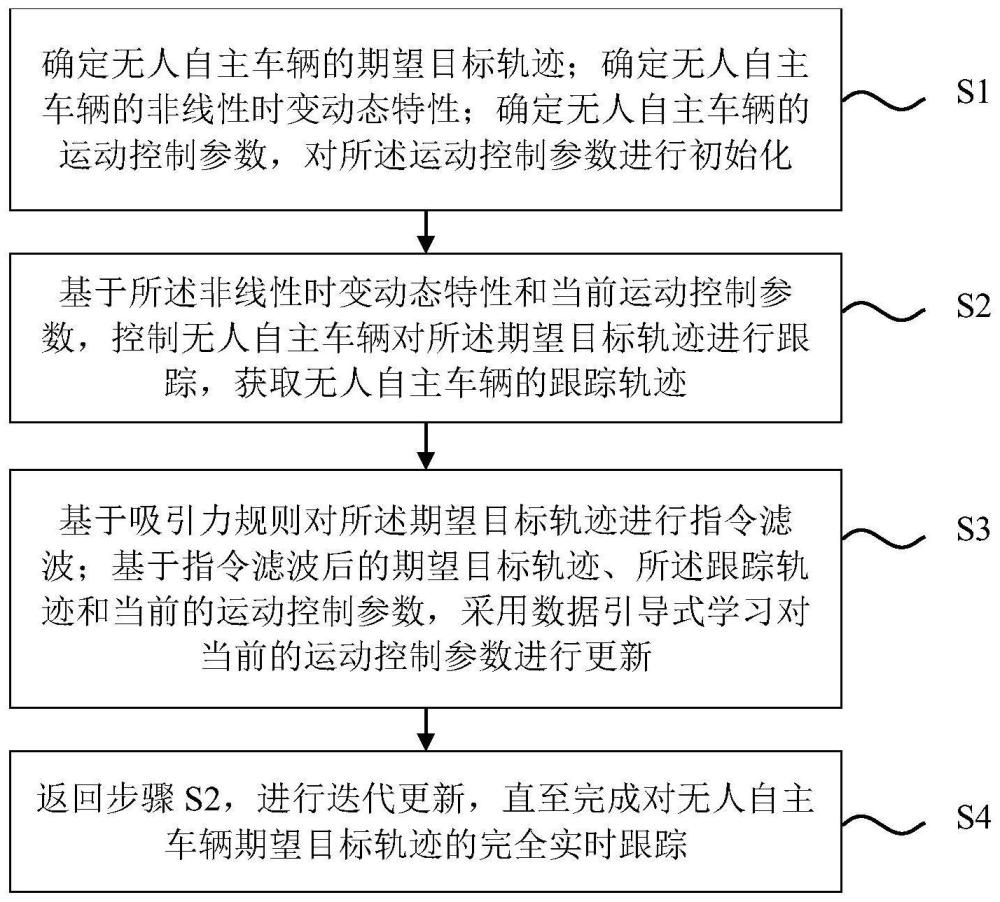
一种无人自主车辆的实时跟踪数据引导式学习控制方法
本发明涉及控制,具体涉及一种无人自主车辆的实时跟踪数据引导式学习控制方法。背景技术:1、目前,无人自主车辆的实时跟踪控制问题在实际应用中受到了广泛的关注。随着无人自主车辆结构的日益复杂化,以及对于无人......
-
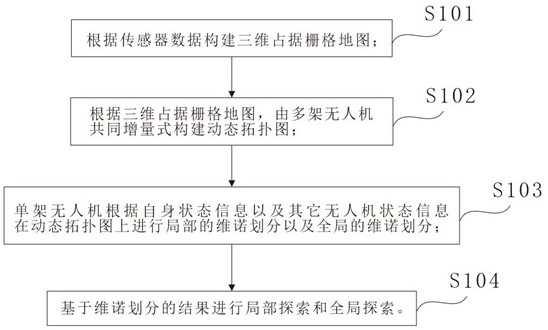
多无人机协同自主探索方法、装置和存储介质
本发明涉及无人机导航领域,具体而言,涉及一种多无人机协同自主探索方法、装置和存储介质。背景技术:1、多无人机协同自主探索是机器人领域的一个热点研究问题。无人机自主探索任务要求无人机自主选择未探索区域、......
-
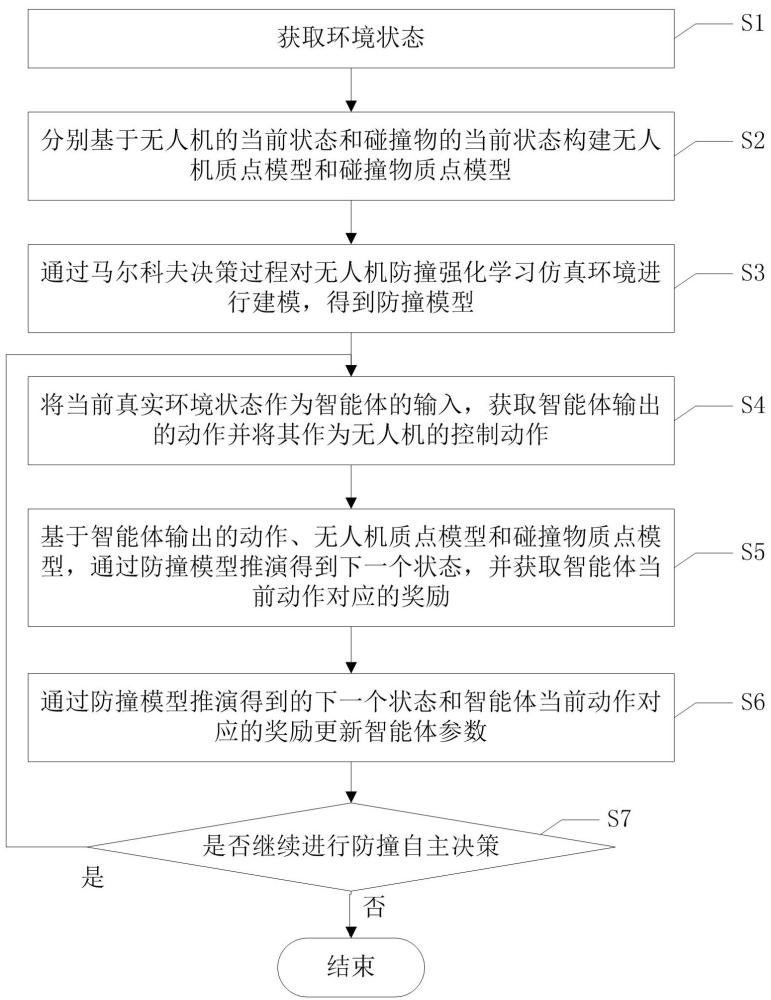
一种无人机防撞自主决策方法
本发明涉及无人机控制领域,具体涉及一种无人机防撞自主决策方法。背景技术:1、随着无人机应用场景的快速增多,其对人们生产生活方式的帮助越来越大,无人机产业正逐渐成为低空经济的主导产业。无人机在农业、物流......
-
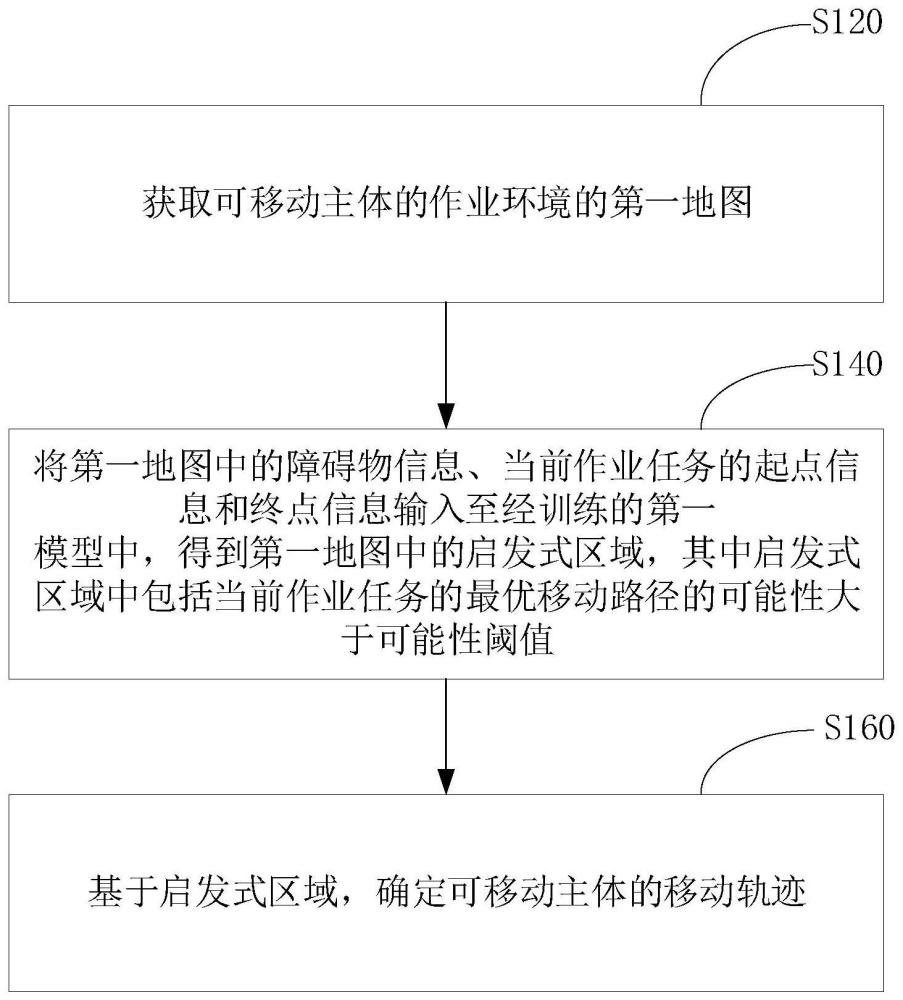
轨迹规划方法、装置和自主系统
本申请属于自主系统,尤其涉及一种轨迹规划方法、装置和自主系统。背景技术:1、近年来,各种自主系统正处于快速发展阶段,不断取得新的技术突破,但同时也面临着多种技术挑战。以无人机系统为例,无人机因其灵活性......
-
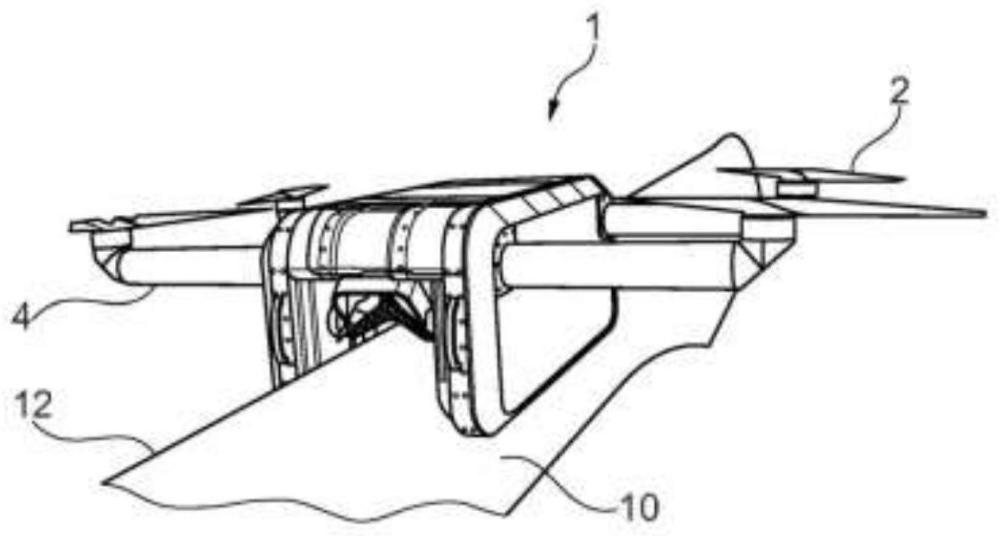
自主飞行器的制作方法
本发明公开了包括工具承载主体的自主飞行器(afv),有时也称为无人机。此外,还公开了在翻新/修复过程中使用afv的方法,特别是在翻新/修复风力涡轮机叶片的前边缘区域过程中使用afv的方法。背景技术:1......
-
一种基于多传感器融合实现自主导航的移动充电机器人
本发明涉及新能源车充电,具体的说是一种基于多传感器融合实现自主导航的移动充电机器人。背景技术:1、随着电动车数量的增加,我们需要建立更多的充电站点,通常情况下为电动车提供充电的有固定式充电站和流动式充......
技术新讯 > 自主 > 列表
 2024-11-19
2024-11-19精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01