多无人机协同自主探索方法、装置和存储介质
- 国知局
- 2024-08-30 15:01:29
本发明涉及无人机导航领域,具体而言,涉及一种多无人机协同自主探索方法、装置和存储介质。
背景技术:
1、多无人机协同自主探索是机器人领域的一个热点研究问题。无人机自主探索任务要求无人机自主选择未探索区域、探索目标点,并利用搭载传感器进行信息收集和地图构建,在尽可能短的时间内完成对未知环境的建图。为提高探索效率,可以将自主探索拓展到多无人机协同探索。目前,低效的探索信息同步和不合理的任务分配仍然是现有多无人机自主协同探索所面临的挑战。为了协调多无人机自主探索,无人机间需要同步已探索地图信息。当前多无人机自主探索方法中信息同步策略主要包括两大类,基于栅格地图的多机信息同步策略和基于拓扑图的信息同步策略。基于栅格地图的多机信息同步策略通过增量式地将栅格地图传输给其他无人机,以同步已探索地图信息,然而此类方法需要传输大量的数据,导致信息同步的延迟,进而降低探索效率。基于拓扑图的信息同步策略通过在已探索区域建立拓扑图并传输拓扑图信息,从而降低信息同步数据量。然而现有拓扑图通常要求节点间连线无障碍物,导致拓扑图相对稠密、节点的度低,进而导致在杂乱环境中需要传输大量数据和绕远路等问题。在实现本发明的过程中,申请人发现:多无人机自主探索中任务分配方法主要包括基于两两协调的分配方法和基于维诺划分的分配方法。两两协调的分配方法通过求解车辆路径规划问题最小化探索路径长度,但由于只考虑了两个无人机,其协调效率随无人机数量增加而下降。基于维诺划分的分配方法通过以无人机当前位置作为基点进行维诺划分,将未探索区域划分给所有无人机以避免重复探索相同区域。此类方法由于维诺划分直接在欧氏空间上进行而未考虑空间中的障碍物,无法保证分配给无人机的目标是距离无人机最近的,从而导致协同探索效率低下。
2、因此,如何高效且合理地分配探索任务,提高探索效率成为亟待解决的技术问题。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一,公开了一种多无人机协同自主探索方法、装置和存储介质,在多无人机协同自主探索任务中,通过整合已探索子区域和可探索子区域信息动态构建可用于高效信息同步的动态拓扑图,并在动态拓扑图上进行维诺划分高效且合理地分配探索任务,降低通信量,提高探索效率。
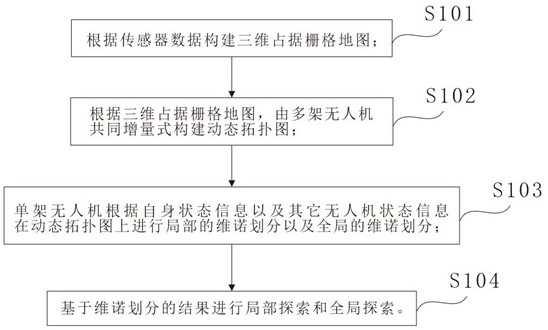
2、本发明的第一方面公开了一种多无人机协同自主探索方法,包括:根据传感器数据构建三维占据栅格地图;根据三维占据栅格地图,由多架无人机共同增量式构建动态拓扑图,期间,单架无人机向其它无人机发送自身动态拓扑图中增量式构建的部分;单架无人机根据自身状态信息以及其它无人机状态信息在动态拓扑图上进行局部的维诺划分以及全局的维诺划分;基于维诺划分的结果进行局部探索和全局探索。
3、根据本发明公开的多无人机协同自主探索方法,优选地,根据传感器数据构建三维占据栅格地图的步骤,具体包括:根据无人机上的机载传感器获取环境信息,机载传感器包括深度相机和/或激光雷达;根据无人机的位姿信息得到世界坐标系下障碍物的位置;根据环境信息和障碍物的位置构建三维占据栅格地图。
4、根据本发明公开的多无人机协同自主探索方法,优选地,动态拓扑图具体包括:动态拓扑图由节点集合和连接节点的边集合组成,其中,动态拓扑图的节点集合,由无人机在经过位置留下的历史节点集合与可探索子区域节点集合组成,动态拓扑图的边集合为连接节点的边的集合,每条边保存连接两个节点的可通行路径以及路径长度。
5、根据本发明公开的多无人机协同自主探索方法,优选地,增量式构建包括:增量式构建具体包括:生成历史节点、生成可探索子区域节点以及多无人机间信息同步;
6、其中,生成历史节点的步骤具体包括:
7、从无人机当前位置开始在曼哈顿距离不超过的范围以内进行dijkstra搜索;当搜索范围内不存在历史节点,或者从当前无人机所在位置到搜索范围内任一历史节点的距离大于阈值时,在无人机当前位置生成一个新的历史节点并添加到;当一个新历史节点生成时,dijkstra搜索时产生的以新历史节点为根的“最短路径树”也被保存;建立新历史节点与搜索范围内的已有历史节点的边,边的长度和路径通过“最短路径树”从已有历史节点位置递归回溯至新历史节点得到;若新历史节点和其他历史节点的“最短路径树”的分支存在交集,通过从这些分支交汇处向两个历史节点递归回溯建立边,以进一步提高动态拓扑图中每个历史节点的度;
8、生成可探索区域节点的步骤具体包括:
9、在进行探索任务以前,将整个待探索空间划分为个子区域,每个子区域对应一个唯一的序号;每个子区域的状态属于以下三种之一:“未探索”、“可探索”和“无法探索”;探索每个子区域的视点,每个视点的状态属于以下三种之一:“未知”、“有增益”和“无增益”;一开始将所有子区域状态初始化为“未探索”,将视点状态初始化为“未知”,一旦某个子区域内的体素被探索,则将子区域状态由“未探索”切换为“可探索”,并添加至;检测“可探索”子区域的视点集内的每个视点:计算所有无碰撞的视点的视锥覆盖的地图边界面积,若覆盖的地图边界面积大于阈值则将视点状态切换为“有增益”,否则切换为“无增益”;将“有增益”的视点连接到距离最近的历史节点,对比一个可探索子区域节点的视点集的所有最短的回溯路径,选择最短的路径,建立可探索子区域节点和对应历史节点的边;如果一个连接历史节点的视点的状态切换为“无增益”,则删除视点与历史节点相连接的边;当一个“可探索”子区域的探索率超过阈值,则将该子区域状态切换为“无法探索”;
10、多无人机间信息同步的步骤具体包括:
11、当动态拓扑图的结构发生变化时,将新生成的历史节点、可探索子区域节点和视点集的状态发送给其他无人机;将动态拓扑图中直接与无人机相连的节点与无人机的距离发送给其它无人机,以便后续维诺划分。
12、根据本发明公开的多无人机协同自主探索方法,优选地,局部的维诺划分具体包括:利用动态拓扑图获取第架无人机局部的局部图;其中,局部图的节点由历史节点集,可探索子区域节点集和无人机节点集组成,即,历史节点集是由与第架无人机直接连接的历史节点组成,由直接与第架无人机直接连接的可探索子区域节点和与第架无人机间接连接的可探索子区域节点组成,由与直接与和相连的无人机组成;局部图中和间的边为动态拓扑图的边,而与这些节点的边通过dijkstra搜索得到,或者由其他无人机传输的局部信息得到;以为起点进行平行dijkstra搜索,得到局部图的维诺划分。
13、根据本发明公开的多无人机协同自主探索方法,优选地,全局的维诺划分具体包括:利用动态拓扑图获取全局图,其中,,为动态拓扑图的所有历史节点组成的集合,为所有无人机组成的节点集合,为节点的边,通过动态拓扑图和无人机间通信获得;以为起点进行平行dijkstra搜索,得到全局图的维诺划分。
14、根据本发明公开的多无人机协同自主探索方法,优选地,局部探索具体包括:基于局部维诺划分的结果采用贪心策略进行探索。
15、根据本发明公开的多无人机协同自主探索方法,优选地,全局探索具体包括:若某架无人机的全局维诺划分结果中的历史节点连接有可探索子区域,则选择距离自身最近的可探索子区域节点进行探索;若某架无人机的全局维诺划分结果中的历史节点没有连接可探索子区域,则分担其它无人机的探索任务。
16、本发明的第二方面公开了一种多无人机协同自主探索装置,包括:存储器,用于存储程序指令;处理器,用于调用存储器中存储的程序指令以实现如上述任一技术方案的多无人机协同自主探索方法。
17、本发明的第三方面公开了一种计算机可读存储介质,该计算机可读存储介质存储有程序代码,程序代码用于实现如上述任一技术方案的多无人机协同自主探索方法。
18、本发明的有益效果至少包括:在多无人机协同自主探索任务中,通过整合已探索空间和可探索空间信息动态构建可用于高效信息同步的动态拓扑图,降低了通信量,并在动态拓扑图上进行维诺划分高效且合理地分配探索任务,提高了探索效率。具体地,本发明在拓扑图构建方面,不要求节点相互可视,大大提高了拓扑图的度;在多机通信方面,通过增量式发送稀疏的动态拓扑图,进而大大减小了多机间通信数据量;在任务分配时,不同于传统维诺划分方法在欧式空间进行划分,而是基于动态拓扑图进行维诺划分,将独立无交集的探索任务分配给每个无人机,进而保证了划分任务与对应无人机的最短探索路径。
本文地址:https://www.jishuxx.com/zhuanli/20240830/285144.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表