一种全分布式多无人艇编队包含控制方法和装置与流程
- 国知局
- 2024-08-01 00:16:07
本发明涉及自动控制,特别是涉及一种全分布式多无人艇编队包含控制方法和装置。
背景技术:
1、无人艇在各领域的应用十分广泛,可用于在海域上搜集所需的水文资料并完成海洋环境的调查任务等。然而单个无人艇因其携带的传感器种类和数量的限制导致其作业能力受限,通过多无人艇协同作业可以显著提高无人艇在海洋勘探、集群作业以及海洋搜救等多个方面的容错性、鲁棒性以及执行效率等系统性能。
2、在现有技术中,通常使用集中式编队来对无人艇进行控制,在实际工作中,无人艇的领导者和跟随者均需要携带高精度的探测装置以及多样化的传感器,这就会降低无人艇的工作效率;其次,航行过程中若发生速度信息丢失,会对整个控制系统的稳定性产生影响;传统的无人艇之间的通信方案以周期的方式对数据进行采样、处理和执行,这会造成不必要的通信资源浪费,从而导致通讯代价较大。
3、鉴于此,克服该现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现思路
1、本发明要解决的技术问题是如何解决无人艇编队的工作效率低、稳定性差以及无人艇之间的通信代价较高的问题。
2、本发明采用如下技术方案:
3、第一方面,提供了一种全分布式多无人艇编队包含控制方法,包括:
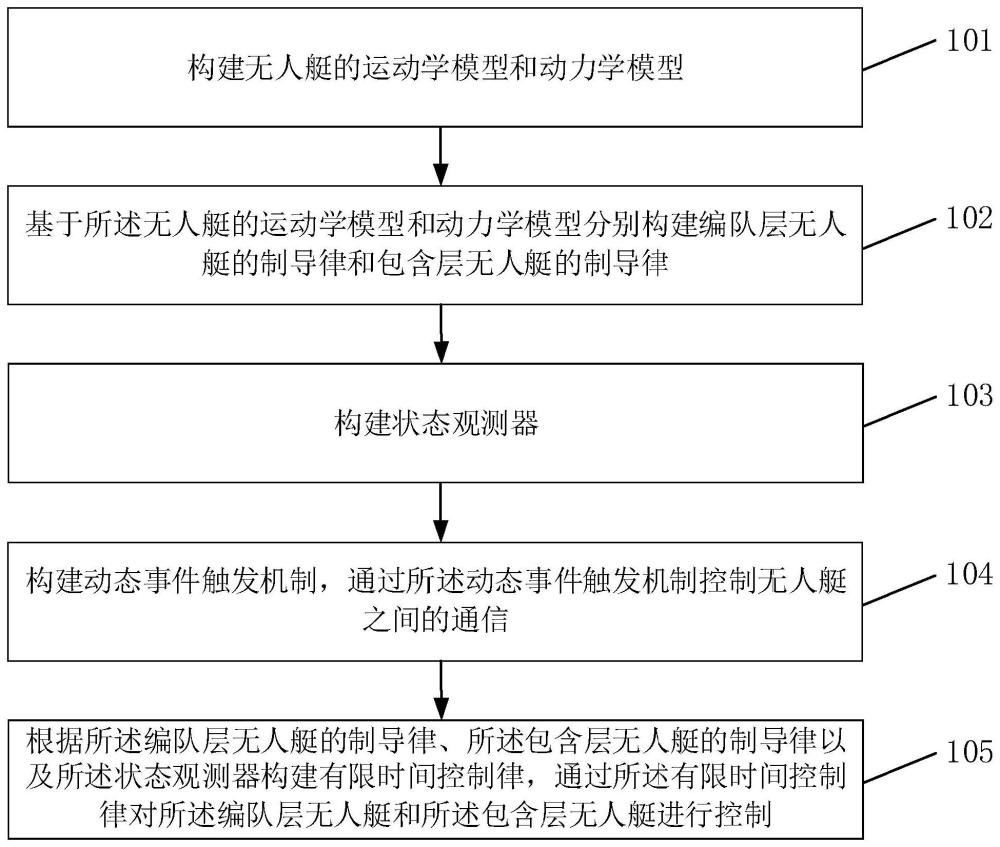
4、构建无人艇的运动学模型和动力学模型;
5、基于所述无人艇的运动学模型和动力学模型分别构建编队层无人艇的制导律和包含层无人艇的制导律;
6、构建状态观测器;
7、构建动态事件触发机制,通过所述动态事件触发机制控制无人艇之间的通信;
8、根据所述编队层无人艇的制导律、所述包含层无人艇的制导律以及所述状态观测器构建有限时间控制律,通过所述有限时间控制律对所述编队层无人艇和所述包含层无人艇进行控制。
9、优选的,所述基于所述无人艇的运动学模型和动力学模型分别构建编队层无人艇的制导律和包含层无人艇的制导律包括:
10、分别定义所述编队层无人艇和所述包含层无人艇的位置跟踪误差;
11、根据所述编队层无人艇和所述包含层无人艇的位置跟踪误差分别得到所述编队层无人艇和所述包含层无人艇的位置跟踪误差的动态方程;
12、构建编队层无人艇的制导律和包含层无人艇的制导律以稳定所述编队层无人艇和所述包含层无人艇的位置跟踪误差的动态方程。
13、优选的,所述分别定义所述编队层无人艇和所述包含层无人艇的位置跟踪误差包括:
14、所述编队层无人艇的位置跟踪误差zi1和所述包含层无人艇的位置跟踪误差zi2分别表示为:
15、
16、其中,r(ψi)附体坐标系转换为惯性坐标系的旋转矩阵,r(ψi)t是对矩阵进行一次转置,是无人艇i在领导层无人艇中的邻居集合,aij表示第i艘无人艇和第j艘无人艇之间的通信关系,aik表示第i艘无人艇和第k艘无人艇之间的通信关系,是无人艇i在包含层无人艇中的邻居集合,k代表第k艘无人艇,是无人艇i在超级领导层无人艇的邻居集合,△pij是第i艘无人艇和第j艘无人艇之间的保持的距离,△pik是第i艘无人艇和第k艘无人艇之间的保持的距离,pj是第j艘无人艇的位置坐标,pk是第k艘无人艇的位置坐标;
17、对上式进行求导可得:
18、
19、其中,pi=[xi,yi]t,zi1表示编队层中第i艘无人艇和它的邻居无人艇的误差以及第i艘无人艇与超级领导艇之间的误差之和,zi2表示包含层中第i艘无人艇和它的邻居无人艇的误差以及第i艘无人艇与领导艇之间的误差之和,ri为第i艘无人艇的转艏角速度,ui和vi分别为第i艘无人艇的纵向速度和横向速度,uj和vj分别为与第i艘无人艇有通信关系的无人艇j的纵向速度和横向速度;定义所述编队层无人艇和所述包含层无人艇的位置跟踪误差为:
20、
21、其中,δ0∈r+为辅助变量,r2表示实数的2维向量;
22、结合人工势能函数,重新定义位置跟踪误差,以使无人艇之间以及无人艇与障碍物之间保持安全距离,其中:
23、人工势能函数为:
24、
25、重新定义的所述编队层无人艇的位置跟踪误差zi3和所述包含层无人艇的位置跟踪误差zi4分别表示为:
26、
27、其中,dij表示第i艘无人艇和第j艘无人艇之间的距离,ζia∈r+为一个常数,αia∈r+满足0<αia<1,dia∈r+满足dia<ra;ra表示避碰检测区间,即当dij<ra时,避碰机制生效,ni为节点i的邻居节点集合,no为故障艇的节点集合,的计算公式与相同,只是将位置信息替换成故障艇的位置信息进行计算。
28、优选的,所述根据所述编队层无人艇和所述包含层无人艇的位置跟踪误差分别得到所述编队层无人艇和所述包含层无人艇的位置跟踪误差的动态方程包括:
29、所述编队层无人艇的位置跟踪误差的动态方程和所述包含层无人艇的位置跟踪误差的动态方程分别表示为:
30、
31、其中,gi=diag{di,δ0}∈r2×2。
32、优选的,所述构建编队层无人艇的制导律和包含层无人艇的制导律以稳定所述编队层无人艇和所述包含层无人艇的位置跟踪误差的动态方程包括:
33、所述编队层无人艇的制导律和包含层无人艇的制导律分别表示为:
34、
35、其中,为对角制导增益矩阵。
36、优选的,所述构建状态观测器包括:
37、所述状态观测器表示为:
38、
39、其中,2/3<αl1<1,αl2=2αl1-1,αl3=3αl1-2,βl1=1/αl1,βl2=αl1+(1/αl1)-1,βl3=2αl1+(1/αl1)-2;kli>0和λli>0(i=1,2,3)是待设计参数,对无人艇速度信息的估计,为观测器对集总扰动的估计,为集总扰动估计值的导数。
40、优选的,所述构建动态事件触发机制,通过所述动态事件触发机制控制无人艇之间的通信包括:
41、事件触发误差函数表示为:
42、
43、其中,为对角增益矩阵,为第i个编队成员的第k个触发时刻,(t)为连续的时间序列;
44、基于误差信息的动态事件触发机制,引入动态变量ξij,将触发条件设计为:
45、
46、
47、其中,αij,βij均为正常数,动态变量ξij满足以下等式:
48、
49、其中,ξij(0)>0,ρij>0。
50、优选的,所述根据所述编队层无人艇的制导律、所述包含层无人艇的制导律以及所述状态观测器构建有限时间控制律包括:
51、定义速度跟踪误差为:
52、
53、其中,和分别表示编队层无人艇和包含层无人艇的期望速度;
54、结合有限时间理论,设计有限时间控制律为:
55、
56、其中,为对角增益矩阵;
57、第二方面,提供了一种全分布式多无人艇编队包含控制装置,所述全分布式多无人艇编队包含控制装置包括:处理器和用于存储处理器可执行指令的存储器;
58、其中,所述处理器被配置为执行所述的全分布式多无人艇编队包含控制方法。
59、第三方面,提供了一种非易失性计算机存储介质,所述计算机存储介质存储有计算机可执行指令,该计算机可执行指令被一个或多个处理器执行,用于完成第一方面所述的全分布式多无人艇编队包含控制方法。
60、第四方面,提供了一种芯片,包括:处理器和接口,用于从存储器中调用并运行存储器中存储的计算机程序,执行如第一方面所述的全分布式多无人艇编队包含控制方法。
61、第五方面,提供了一种包含指令的计算机程序产品,当该指令在计算机或处理器上运行时,使得计算机或处理器执行如第一方面至第四方面及其任一项所述的全分布式多无人艇编队包含控制方法。
62、与现有技术相比,本发明的有益效果在于:
63、本发明设计了编队层无人艇和包含层无人艇双层控制架构,使得编队层无人艇需要携带高精度的探测装置和多样化的传感器,能够根据外界环境的变化以及任务目标的变更,自主航行至安全区域,包含层无人艇仅需要携带低性能的检测设备,扩大了携带执行任务的载荷,不仅大幅提升了任务的执行效率,还提高了整个系统的安全性;同时,本发明通过设计状态观测器来处理集总扰动以及速度信息不可测对无人艇自身控制系统的影响,提升了整个系统的快速性以及安全性;最后,本发明设计了动态事件触发机制来提升系统对通信网络带宽的利用率,降低了无人艇之间的通信频率,并节省了资源。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。