针对复杂设备的数字孪生虚实交互控制决策融合方法
- 国知局
- 2024-08-01 00:16:04
本发明属于复杂设备数字孪生智能化控制领域,涉及一种针对复杂设备的数字孪生虚实交互控制决策融合方法,具体是针对复杂设备虚实交互过程中由于传感器采集与响应、信号处理与计算、网络通信与延迟等原因导致的固有时延和时延波动等问题,提出物理端和虚拟端的虚实交互控制决策融合的方法。
背景技术:
1、现代复杂设备往往具有高度的集成度和复杂的工程结构,这些设备包含大量的传感器、执行器和控制系统,需要在复杂的工况下进行工作,并满足高效、可靠和安全的运行要求。复杂设备智能化运行可以优化设备的操作和控制、提高设备的运行效率和生产效率、提高安全性、预测故障和远程监控管理等。为保障人员安全,提高设备效率,需要对复杂设备智能化控制技术进行研究。
2、数字孪生技术通过构建虚实之间的双向连接,虚拟模型模拟物理实体的行为,使物理世界和信息世界融合起来。复杂设备的智能化运行需要物理端和虚拟端配合工作,物理端设备提供运行的真实状况,虚拟端通过算法和累积的经验提供精准决策。
3、但在实际的设备虚实交互工作过程中,由于传感器采集与响应、信号处理与计算、网络通信与延迟等原因导致的固有时延,无法实现绝对的虚实决策同步,这些时延的累加可能会导致虚拟决策的时效性降低,甚至无法使用。因此对于某些特定的虚实交互应用,考虑时延的影响是很重要的。
技术实现思路
1、针对传感器信息采集与响应延迟、信息处理算法决策耗时和网络延迟通信时延等多种延时累积可能导致的虚实交互决策延迟问题,本发明提出将物理端的控制决策和虚拟端的控制决策交互融合的应对方案,通过状态对齐、演变预判和指令融合方法降低固有时延和时延波动对决策精准性的影响,以保证虚拟端的决策时效性和可靠度。
2、本发明为了解决上述的复杂设备物理端和虚拟端交互的时延性问题,具体的技术方案包括以下步骤:
3、步骤1:设备未出现异常状态的运行;
4、步骤2:判断是否出现异常状态映射点a1;
5、步骤3:计算算法从产生到执行所需要的时间δt;
6、步骤4:计算δt后的异常状态a2,虚拟端对a2决策;
7、步骤5:生成决策则虚实决策融合并执行,未生成决策则重新评估;
8、步骤6:判断设备状态是否回归正常。
9、具体的:
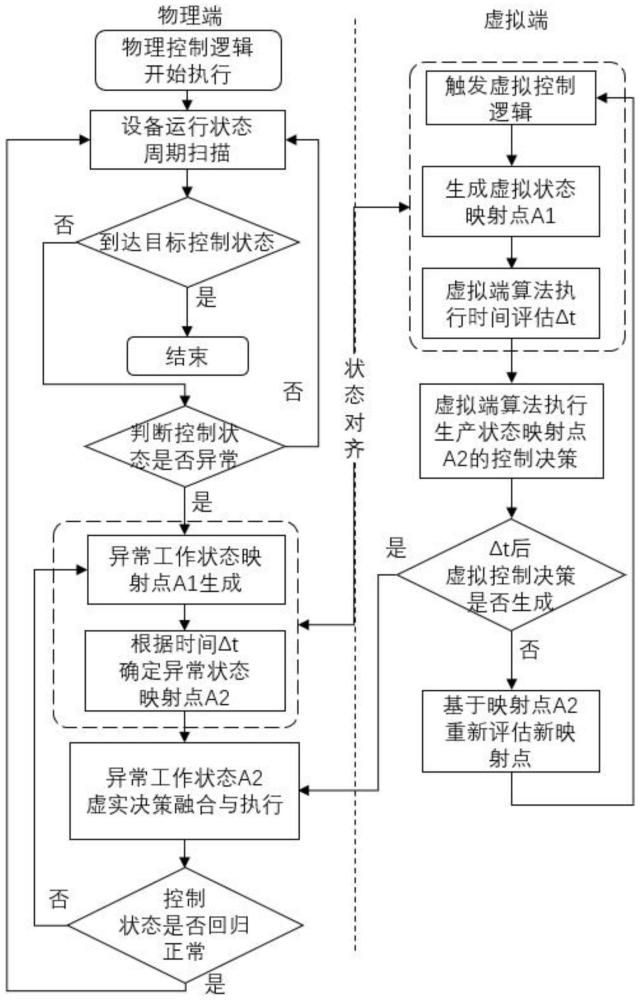
10、步骤1:工作开始,物理控制逻辑开始执行,对设备运行状态进行周期扫描,到达目标控制状态则结束,设备正常运行;
11、步骤2:当未达到目标控制状态,判断控制状态是否异常,状态正常则运行物理控制逻辑,当异常状态时产生异常工作状态映射点a1;
12、步骤3:异常工作状态触发虚拟控制逻辑,虚拟端生成虚拟状态映射点a1,虚拟端算法决策产生到执行所需的时间δt;
13、步骤4:虚拟端对映射点a1经过δt生成的异常状态映射点a2进行控制决策;
14、步骤5:δt后,虚拟控制决策生成则和异常工作状态a2进行虚实决策融合并执行,未生成决策则基于映射点a2重新评估设备运行状态新映射点。
15、步骤6:判断控制状态是否回归正常,回归正常则正常进行设备运行状态周期扫描,不正产则生成异常状态映射点进行虚拟端决策控制。
16、本发明在虚实交互控制系统中,物理端和虚拟端的控制的时间尺度不一致,物理端主要由硬件组成,主要是plc(可编程逻辑控制器)等,响应时间通常在毫秒级别。物理端的任务是监测传感器数据、执行控制命令和响应外部事件,以实时地控制和操作物理系统。
17、虚拟端主要由算法、模型和软件组成,时间尺度可以更灵活,通常在亚秒级别或更长。虚拟端的任务是对来自物理端的数据进行处理和分析,生成控制指令,并进行优化和决策。
18、本发明的关键在于采用虚实交互的时间控制框架,虚拟端对算法执行时间δt进行评估计算。针对虚拟决策到达物理端时的时间延时δt,此时物理端的状态变化由a1到a2,因此虚拟端直接对δt后的物理a2状态进行决策,并根据实时状态进行决策融合,保证虚拟端的决策时效性。
19、本发明与现有技术相比,具有的技术效果:
20、本发明与现有的虚拟算法控制决策直接应用到物理设备运行的技术相比,本发明考虑到了虚实交互控制中存在的多种固有时延会导致虚拟端的决策滞后性甚至无法使用,将虚拟端算法一系列的固有时延的偏移工作量考虑到虚拟端算法的决策设计中,同时把物理端和虚拟端的优势结合起来思考,将物理端的快速响应短周期控制决策和虚拟端的精准修正长周期控制决策融合应用到复杂设备的虚实交互控制中,从而进一步提升设备短周期决策的修正精准性和长周期决策的整体稳定性,防止实际工作偏移预期的设备运行轨迹,实现数字控制与物理控制的智能协同,提升复杂设备在突发扰动条件下的智能化控制水平,提高设备工作效率和安全性。
21、有益效果:考虑到固有时延的影响并做出虚拟端的决策设计,新的融合决策对设备受到扰动的最近状态做出工作规划,并且虚拟端通过算法累积经验修正物理端的整体控制程序由于突发扰动事件导致的控制基准变化,从而提升复杂设备物理端的整体工作规划稳定性和虚拟端的异常设备状态精准修正水平。
22、采用本发明的技术方案,通过对虚实交互时延的时间段分析,把物理端和虚拟端的优势结合起来思考,融合物理端和虚拟端的控制决策;在固有时延存在的情况下,将虚拟端精准的控制决策下发至物理端,充分发挥虚拟端的智能精准的修正优势来控制设备工作,针对长周期的控制目标修正整体的控制程序,实现物理端和虚拟端的整体控制目标的达成。既对复杂设备控制的突发扰动做出近期控制决策,也保证持久工作布局的远期控制目标的达成,实现数字控制与物理控制的智能协同,提升复杂设备在突发扰动条件下的智能化控制水平,提高设备工作效率和安全性。
23、有益效果1:虚拟端会提供精准的修正量。
24、有益效果2:对出现突发状况的长周期控制目标进行修正,修正整体控制程序因为突发扰动事件导致的控制基准变化。
技术特征:1.针对复杂设备的数字孪生虚实交互控制决策融合方法,其特征在于,将物理端的控制决策和虚拟端的控制决策交互融合,通过状态对齐、演变预判和指令融合方法降低固有时延和时延波动对决策精准性和时效性的影响。
2.根据权利要求1所述的针对复杂设备的数字孪生虚实交互控制决策融合方法,其特征在于,包括以下步骤:
3.根据权利要求1所述的针对复杂设备的数字孪生虚实交互控制决策融合方法,其特征在于,各个步骤具体为:
4.一种存储介质,其特征在于,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行权利要求1到3任一项所述的方法。
5.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1到3任一项所述的方法。
技术总结本发明提出一种针对复杂设备的数字孪生虚实交互控制决策融合方法,将物理端的控制决策和虚拟端的控制决策交互融合的应对方案,通过状态对齐、演变预判和指令融合方法降低固有时延和时延波动对决策精准性和时效性的影响;步骤1:设备未出现异常状态的运行;步骤2:判断是否出现异常状态映射点A1;步骤3:计算算法从产生到执行所需要的时间Δt;步骤4:计算Δt后的异常状态A2,虚拟端对A2决策;步骤5:生成决策则虚实决策融合并执行,未生成决策则重新评估;步骤6:判断设备状态是否回归正常。本发明适用于复杂设备物理端和虚拟端交互过程中因时延问题导致虚实决策难以融合的场景。技术研发人员:王岩,寇浩楠,高宇乐,魏世睿,韩笑,贾泽宇,张旭辉受保护的技术使用者:西安科技大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200344.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表