针对轨迹跟踪控制问题的神经反步控制器设计方法和系统
- 国知局
- 2024-07-31 23:50:39
本发明涉及自动控制,特别涉及一种针对轨迹跟踪控制问题的神经反步控制器设计方法和系统。
背景技术:
1、在工程实践过程中,工程技术人员经常需要对机器人、飞行器等复杂的非线性系统进行控制。对于非线性系统的控制,一般分为两类,分别是传统非线性控制方法以及基于神经网络的控制方法。传统非线性控制方法,例如滑模控制和鲁棒自适应控制,不适用于存在状态和输入约束的情况。基于神经网络的控制,例如深度神经网络(deep neuralnetwork,dnn),具有很强的逼近能力,但由于其黑盒性质,很难提供稳定性保证。对于非线性系统的控制,针对轨迹跟踪控制问题,目前市场上还没有安全且具有性能保证的结构化神经网络控制器。而且当非线性系统的系统模型未知时,控制器的性能和稳定性也将受到极大程度的限制。
技术实现思路
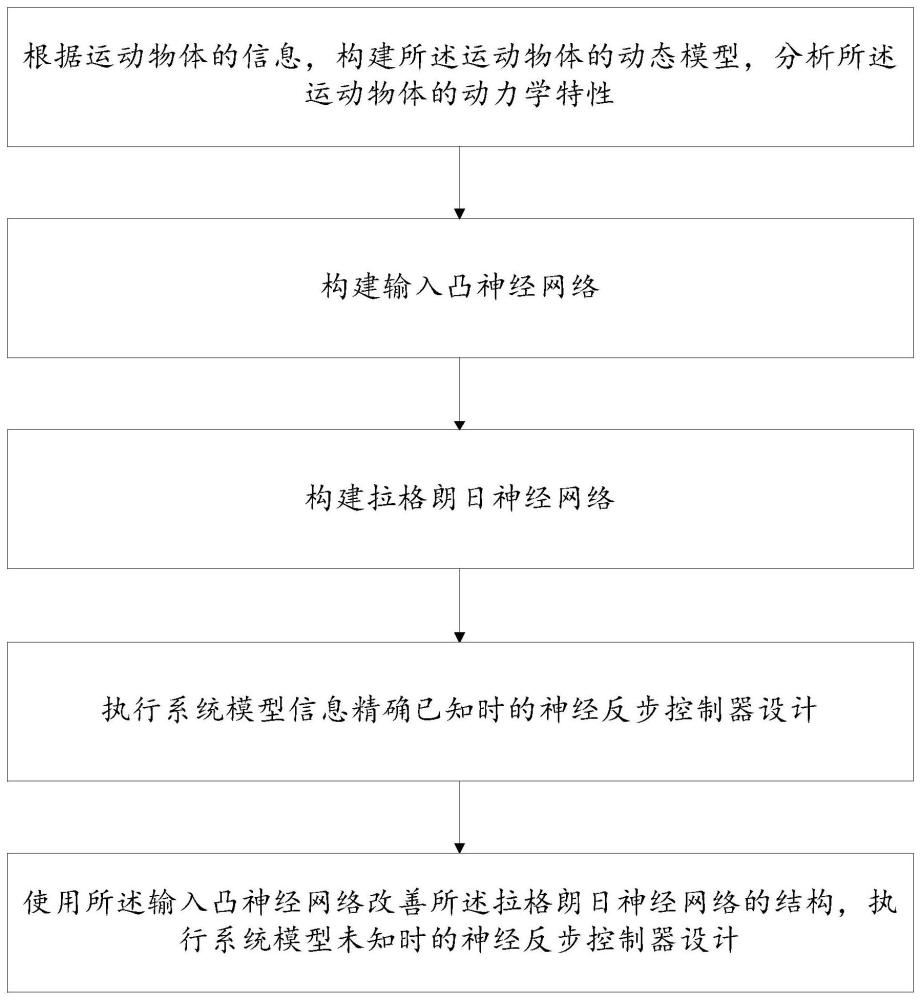
1、针对现有技术中的部分或全部问题,本发明提供一种针对轨迹跟踪控制问题的结构化神经网络控制器设计方法,即神经反步控制器设计方法,该方法包括以下步骤:
2、根据运动物体的信息,构建所述运动物体的动态模型,分析所述运动物体的动力学特性;
3、构建输入凸神经网络;
4、构建拉格朗日神经网络;
5、执行系统模型信息精确已知时的神经反步控制器设计;
6、使用所述输入凸神经网络改善所述拉格朗日神经网络的结构,执行系统模型未知时的神经反步控制器设计。
7、进一步地,所述构建所述运动物体的模型,分析所述运动物体的动力学特性包括:
8、根据欧拉-拉格朗日方程构建所述运动物体的动态模型,
9、
10、其中,l代表拉格朗日量,t代表动能,v代表势能,q代表广义坐标,u代表广义的非保守力,τd代表作用在系统上的扰动。
11、所述动态模型(1)可以转化为标准机械臂动力学方程,
12、
13、其中,代表惯性矩阵,代表重力向量,代表科里奥利矩阵。
14、根据所述动力学方程(2),可以得到如下2个性质,
15、性质1:m代表一个对称且正定的矩阵,且受限于其中,a1,a2代表正的常数,‖·‖代表欧几里得范数;
16、性质2:是斜对称矩阵,
17、进一步地,所述构建输入凸神经网络包括:
18、构建全输入凸神经网络,
19、
20、其中,σi代表每一层的激活函数;是深度神经网络参数,并且y0≡0,f(x;θ)保证对x是凸的条件是,保证是非负的并且激活函数σi是凸的且非减的。
21、构建部分输入凸神经网络,
22、
23、其中,σi和代表每一层的激活函数,y0=0,是深度神经网络参数,是哈达玛积;保证对x是凸的条件是,保证是非负的并且激活函数是凸的且非减的。
24、进一步地,所述构建拉格朗日神经网络包括:
25、构建由参数为γ的全连接神经网络
26、对系统实际运行过程中的n+1个状态进行采样,得到训练数据集,
27、
28、计算对应的构成对应的训练集
29、通过求解式子(5)的优化问题来进行训练,
30、
31、
32、其中,s.t.表示使得满足,q=qt>0。
33、进一步地,所述执行系统模型信息精确已知时的神经反步控制器设计包括:
34、定义跟踪误差为,
35、
36、其中,qd(t)代表参考轨迹,并且连续可微;q(t)代表系统状态,φ(t)是后续设计的虚拟信号。
37、定义神经反步控制器和虚拟信号为,
38、
39、
40、其中,代表惯性矩阵,代表重力向量,代表科里奥利矩阵。
41、定义φ为:
42、φ(z1(t);θ1,s)=ψ(z1(t);θ1)+z1(t)tsz1(t)
43、其中,s代表超参数,是一个正定的矩阵;ψ代表一个输入为z1,参数为θ1的全输入凸神经网络。
44、将式子(3)中的偏置项bi置0,来保证ψ(0)=0;
45、将smoooth relu函数作为激活函数,来保证ψ(z1)≥0;
46、d(z2;θ2,m)代表一个深度神经网络参数θ2,超参数m,输入z2特别定制的神经网络。
47、通过优化神经网络的参数来提升控制性能,优化方程为,
48、
49、s.t.模型:(2)
50、误差:(6)
51、控制器:(7)
52、初始状态:
53、其中,s.t.表示使得满足,lt代表在t时刻的阶段代价,α是一个正常数;对应的最优参数可以通过求解优化方程(8)来实现。
54、进一步地,所述使用所述输入凸神经网络改善所述拉格朗日神经网络的结构,执行系统模型未知时的神经反步控制器设计包括:
55、使用一个部分输入凸神经网络来学习使用一个全连接神经网络lv(q(t);γ2)来学习v(q(t)),改善后的拉格朗日神经网络为,
56、
57、其中,γ={γ1,γ2}是神经网络参数,激活函数为softplus函数。
58、对所述改善后的拉格朗日神经网络的输出求海森矩阵和雅可比矩阵,得到m,c,g的估计为,
59、
60、将所述改善后的拉格朗日神经网络当成一个不确定系统,系统的方程为,
61、
62、其中,是不确定项;根据泰勒一阶展开,设定不确定项满足:
63、
64、其中,a、b、c都是正常数,是‖·‖取欧几里得范数。
65、系统模型未知时的神经反步控制器为,
66、
67、
68、通过优化神经网络的参数来提升控制性能,优化方程为,
69、
70、s.t.模型:(9)
71、误差:(6)
72、控制器:((11)
73、初始状态:
74、其中,s.t.表示使得满足,lt代表在t时刻的阶段代价,α是一个正常数。
75、进一步地,对于式子(2)的模型,假设没有扰动,使用式子(7)作为控制器;φ(z1)对输入z1强凸,有且仅有一个最小点于z1=0且φ(0)=0;d(z2)是正定的;系统全局渐进稳定于z1=0,z2=0。
76、进一步地,对于式子(2)的模型,假设扰动的界限为‖τd‖2≤d,使用式子(7)作为控制器,如果系统的跟踪误差收敛于
77、对于式子(2)的模型,假设扰动的界限为‖τd‖2≤d,使用式子(7)作为控制器,如果并且系统的跟踪误差收敛于
78、进一步地,对于式子(9)的模型,假设扰动的界限为‖τd||2≤d,不确定项满足式子(10),使用式子(11)作为控制器,如果且系统的跟踪误差收敛于其中,
79、本发明还提供一种针对轨迹跟踪控制问题的神经反步控制器设计系统,该系统包括以下模块:
80、动力学特性分析模块,被配置为根据运动物体的信息,构建所述运动物体的动态模型,分析所述运动物体的动力学特性;
81、凸神经网络构建模块,被配置为在其中构建输入凸神经网络;
82、拉格朗日神经网络构建模块,被配置为在其中构建拉格朗日神经网络;
83、第一神经反步控制器设计模块,被配置为在其中执行系统模型信息精确已知时的神经反步控制器设计;
84、第二神经反步控制器设计模块,被配置为使用所述输入凸神经网络改善所述拉格朗日神经网络的结构,执行系统模型未知时的神经反步控制器设计。
85、与现有技术相比,本发明具有如下优点:
86、1.本发明针对轨迹跟踪控制问题提出了一种具有稳定性保证和性能保证的神经反步控制器。
87、2.本发明提出的神经反步控制器针对任意可行的深度神经网络参数都是稳定的,且能够通过优化参数来提升性能。
88、3.本发明提出的神经反步控制器,在系统存在扰动或模型不确定性的情况下,也能保证稳态跟踪误差是有界限的。
89、4.当系统模型未知或难以获取时,本发明提出的神经反步控制器也能结合改进的拉格朗日神经网络来进一步改善,并且能够保证轨迹跟踪的稳定性和性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198788.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表