面向狭窄水域航行任务的大型船舶高稳定控制方法
- 国知局
- 2024-08-01 00:16:04
本发明涉及船舶运动控制,尤其涉及一种面向狭窄水域航行任务的大型船舶高稳定控制方法。
背景技术:
1、现有船舶路径跟踪控制大部分以小型或中型船舶作为研究对象,而针对大型船舶控制而展开的研究较少。大型船舶具有质量大、惯性大和时滞长等特点,上述特点意味着大型船舶操纵难度更大,同时意味着更高的控制难度。狭窄水域通常指海峡、河道或港口等地方,这些地方可能存在水流、潮汐和风向变化等复杂的水文条件,使得大型船舶控制变得更加困难。在大型船舶狭水域航行过程中,控制系统需要为船舶提供更精准的控制输入和快速的反应能力以避免与沿岸或浅滩发生碰撞。总之,大型船舶控制问题研究仍面临着巨大的挑战,高精度的控制算法可以保证大型船舶在狭窄水域高稳定航行,因此,大型船舶控制问题的深入研究对海洋工程具有重要意义。
2、在船舶路径跟踪控制问题的研究中,由于船舶本身操纵性能复杂,具有大惯性,大时滞,非线性等特点,船舶控制问题面临着巨大的挑战。由于船舶系统的特殊性,如何高精度地实现船舶路径跟踪控制成为了海洋工程学科的重点研究问题。在现有算法中,已经提出了一种基于lvs制导方案的鲁棒自适应船舶路径跟踪控制算法[1],此外传统的船舶路径跟踪控制方案将整个控制系统划分为三个模块[2]:制导模块、控制模块和航行模块。制导模块通过制导律产生参考信号,将期望参考信号传输到控制模块从而实现对船舶的有效控制。然而,传统的lvs制导方案随着时间的累积会出现所谓的“航路点超调”问题[3]。此外,对于大型船舶狭窄水域航行控制任务而言,参考路径需要更加精确。
3、现有算法大多利用模型预测控制和神经网络等方法逼近船舶模型中的非线性项,从而有效降低非线性项对控制系统的影响。然而随着上述这种非线性项逼近技术的引入,以径向基神经网络为例[4],大量设计参数将被引入到控制系统当中,这大大增加了控制器设计复杂度,在后续的参数整定阶段需要投入大量时间进行参数整定,带来了不必要的麻烦。此外,控制系统控制输入信号实时传输,很多从控制器单元到执行器单元的非必要信号实时传输,这带来了极大的通信负载[5]。同时,连续的控制输入信号在航海实践中显然不符合工程实际,长时间高频的控制输入命令也会给执行器带来磨损,引起不必要的能源损耗和经济消耗。
4、基于上述分析,现有的船舶路径跟踪控制问题的主要缺陷有如下3点:
5、1)lvs制导方案基于时间产生参考路径,随着航路点数量的增加和时间的累积,在航路点附近会产生一定的距离超调量,从而影响制导精度。
6、2)利用径向基神经网络技术逼近船舶模型中的非线性项会引入较多的设计参数,使整个系统的设计复杂度较高,在后续参数整定阶段将会引起不必要的麻烦。
7、3)控制输入信号实时传输,有时甚至会出现大幅度的波动,这些非必要的控制输入信号带来了通讯负载问题,甚至会加速执行器磨损。
技术实现思路
1、本发明提供一种面向狭窄水域航行任务的大型船舶高稳定控制方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种面向狭窄水域航行任务的大型船舶高稳定控制方法,包括以下步骤:
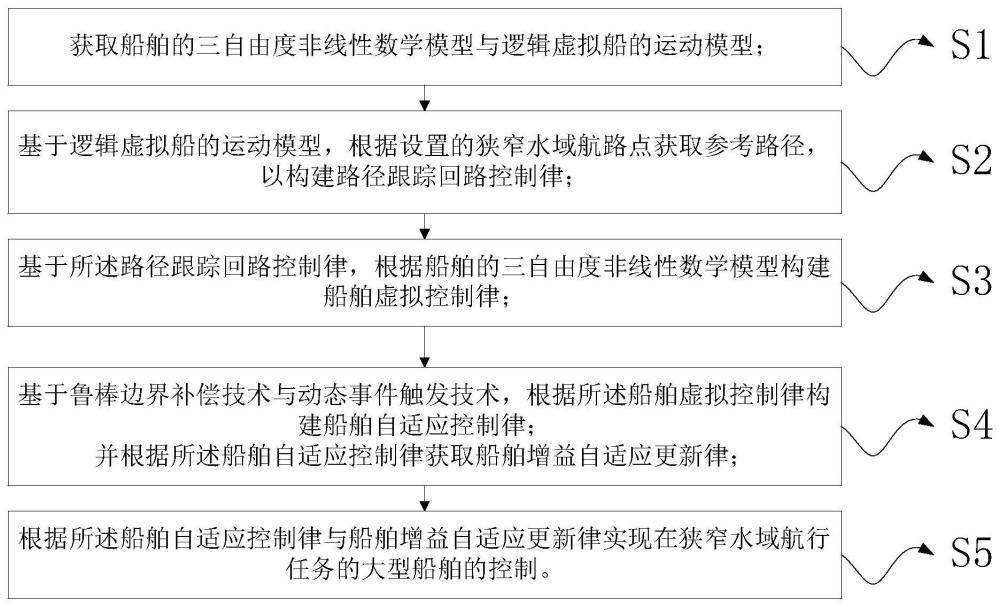
4、s1:获取船舶的三自由度非线性数学模型与逻辑虚拟船的运动模型;
5、s2:基于逻辑虚拟船的运动模型,根据设置的狭窄水域航路点获取参考路径,以构建路径跟踪回路控制律;
6、s3:基于所述路径跟踪回路控制律,根据船舶的三自由度非线性数学模型构建船舶虚拟控制律;
7、s4:基于鲁棒边界补偿技术与动态事件触发技术,根据所述船舶虚拟控制律构建船舶自适应控制律;
8、并根据所述船舶自适应控制律获取船舶增益自适应更新律;
9、s5:根据所述船舶自适应控制律与船舶增益自适应更新律实现在狭窄水域航行任务的大型船舶的控制。
10、进一步的,s1中所述船舶的三自由度非线性数学模型的表达式为
11、
12、
13、
14、
15、式中:x,y分别表示船舶的位置横坐标与位置纵坐标;ψ表示船舶的艏向角;u表示船舶的前进速度;v表示船舶的横向速度;r表示船舶的艏摇角速度;mu表示船舶在前进自由度上的水动力附加质量;mv表示船舶在横漂自由度上的水动力附加质量;mr表示船舶在艏摇自由度上的水动力附加质量;fu(v),fv(v),fr(v)分别表示船舶在前进自由度、横漂自由度以及艏摇自由度上的非线性项;ν=[u,v,r]t表示船舶三自由度方向的运动加速度;x|u|u,y|v|v,n|r|r,n|v|v,xvr,xvv,xrr,yv,yr,y|r|r,yvvr,yvrr,nv,nr,n|r|r,nvvr,nvrr表示船舶与纵荡、横荡和艏摇运动相关的力和力矩;dwi,i=u,v,r表示为外界环境作用在船舶前进、横漂和艏摇自由度上的干扰力和力矩;sat(n)与sat(δ)分别表示经过舵机伺服系统的主机转速n与舵角δ;tu(·),fr(·)分别表示主机转速与舵角的控制增益;δmax表示船舶最大舵角;δmin表示船舶最小舵角;n,δ分别表示船舶的主机转速与舵角;nmax表示船舶最大主机转速;δmin表示船舶最小主机转速;ρs表示海水密度;dp表示螺旋桨直径;jp表示螺旋桨推进系数;kt表示关于jp的非线性函数;tp与αh表示螺旋桨与舵周围的伴流系数;ur与vr表示纵荡与横荡运动相应的伴流速度;λr与ar表示舵叶的长宽比与舵叶面积;lr表示船舶艏尾垂线间距;xr与xh表示与船舶重心到舵叶间距相关的尺寸参数;
16、所述逻辑虚拟船的运动模型的表达式为
17、
18、式中:xd与yd分别表示逻辑虚拟船的纵向和横向位置坐标,ψd表示逻辑虚拟船的艏向角,ud表示逻辑虚拟船的期望速度,rd表示逻辑虚拟船的期望艏摇角速度;表示ψd的一阶导。
19、进一步的,所述s2具体包括以下步骤:
20、s21:基于逻辑虚拟船的运动模型,根据设置的狭窄水域航路点获取参考路径;并将所述参考路径划分为直线段部分与曲线段部分;
21、s22:根据所述参考路径构建路径跟踪回路控制律,所述路径跟踪回路控制律包括基于直线段部分的第一路径跟踪控制律与基于曲线段部分的第二路径跟踪控制律;
22、所述第一路径跟踪控制律的表达式为
23、
24、式中:lset表示传感器探测半径;θ表示逻辑虚拟船与参考航路点连线与其船艏向的夹角;a⊥表示逻辑虚拟船垂向加速度;l表示逻辑虚拟船到航路点连线的垂向距离;
25、所述第二路径跟踪控制律的表达式为
26、
27、式中:rmin与rmax分别表示为设置的最小转弯半径与最大转弯半径;δψi表示下一个航路点路径方向角与上一个航路点路径方向角的差值;ri表示下一个航路点与上一个航路点路径之间的转弯半径。
28、进一步的,所述s3具体包括以下步骤:
29、s31:根据船舶的三自由度非线性数学模型基于所述路径跟踪回路控制律,实现参考路径的跟踪,并定义船舶的位置跟踪误差ze与船艏角跟踪误差ψe;
30、所述船舶的位置跟踪误差ze与船艏角跟踪误差ψe的表达式为
31、
32、
33、式中:xe与ye分别表示船舶与逻辑虚拟船之间的位置横坐标误差与位置纵坐标误差;ψr表示期望船艏角信号;
34、s32:根据所述船舶的位置跟踪误差ze与船艏角跟踪误差ψe,构建船舶虚拟控制律,所述船舶虚拟控制律的表达式为
35、
36、式中:αu,αr分别表示船舶的前进虚拟控制律与艏摇虚拟控制律;均表示设计参数;δxy表示用于确保实船始终跟踪虚拟船的常量。
37、进一步的,所述s4具体包括以下步骤:
38、s41:基于动态面dsc技术,采用一阶滤波器βi,(i=u,r)优化所述船舶虚拟控制律;
39、所述船舶虚拟控制律优化的表达式为
40、
41、式中:∈i表示时间常量;s表示拉氏算子;αi,i=u,r表示船舶虚拟控制律的总称;αi(0),βi(0)分别表示船舶虚拟控制律与一阶滤波器的初始值;
42、s42:基于优化的所述船舶虚拟控制律定义船舶的动态跟踪误差,以获取所述船舶的动态跟踪误差的导数;所述船舶的动态跟踪误差包括前进速度误差ue与艏摇角速度误差re;
43、所述船舶的动态跟踪误差的导数表达式为
44、
45、式中:i=u,r表示βi的一阶导;
46、s43:根据公式(12),考虑动态跟踪误差的微分中存在非线性项与外界环境扰动,并基于鲁棒边界补偿技术处理非线性项;
47、所述基于鲁棒边界补偿技术处理非线性项的处理表达式为
48、
49、式中:si(ν)为基于(2)提出的已知函数,为已知函数si(ν)的边界补偿函数;表示外界扰动上界;ζi,(i=u,r)表示根据无量纲数据确定的设计参数;fi(ν),i=u,r表示动态跟踪误差的微分中存在的非线性项;
50、s44:基于动态事件触发detc技术,将船舶控制器传输至执行器的船舶控制输入改写为
51、
52、ci=max{sign(μe)tanh(μe),0.01},
53、式中:与表示边界参数;ci与ωi表示阈值触发参数,且i=u,r;μe表示中间参数变量且μe=[ze-δxy,ψe]t;t表示转置;uj表示船舶控制器的控制输入,且u=n,δ;j表示航路点路径;表示ωi的一阶导;ujk表示表示k时刻的船舶控制器的控制输入;
54、s45:基于增益自适应技术,根据所述船舶控制输入定义船舶自适应控制律的设计参数λu,λr,所述船舶自适应控制律的设计参数的表达式为
55、
56、
57、s46:根据所述船舶自适应控制律的设计参数获取船舶自适应控制律,且所述船舶自适应控制律的表达式为
58、
59、式中:表示设计参数的自适应律;θn,θδ表示中间控制律;ζu,ζr表示表示根据无量纲数据确定的设计参数;表示基于(2)的已知函数si(ν)的边界补偿函数;表示正的设计参数;
60、s47:根据所述船舶自适应控制律获取船舶增益自适应更新律,所述船舶增益自适应更新律的表达式为
61、
62、式中:表示船舶增益自适应更新律;γu,γr,σu,σr均表示正的设计参数;表示设计参数的自适应律的初始值。
63、有益效果:本发明提供了一种面向狭窄水域航行任务的大型船舶高稳定控制方法,基于逻辑虚拟船的运动模型,根据设置的狭窄水域航路点获取参考路径,以构建路径跟踪回路控制律;基于路径跟踪回路控制律,根据船舶的三自由度非线性数学模型构建船舶虚拟控制律;路径跟踪回路控制律通过引入垂向加速度的方式消除逻辑虚拟船制导中由于时间累积的存在而产生的“航路点超调”问题,进而能够产生精确的路径参考信号;根据船舶虚拟控制律构建船舶自适应控制律与船舶增益自适应更新律;通过鲁棒边界补偿技术逼近非线性项,在消除了非线性项对控制系统的影响的同时能够有效降低传统的径向基神经网络引起的高设计复杂度问题,通过具有简洁形式的控制器设计,从而减少不必要的参数整定;同时通过引入动态事件触发detc技术设计控制器,无需人工整定触发阈值参数,能够降低通信负载且有效减少执行器磨损;进而根据船舶自适应控制律与船舶增益自适应更新律有效实现了在狭窄水域航行任务的大型船舶的高稳定控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200343.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。