面向欠驱动无人潜航器深度跟踪的无模型自适应控制方法
- 国知局
- 2024-08-01 00:13:46
本技术属于无人潜航器控制,更具体地,涉及一种面向欠驱动无人潜航器深度跟踪的无模型自适应控制方法。
背景技术:
1、近年来,自主水下无人潜航器(uuv)在水下探测中的应用引起了人们的广泛关注。与载人潜水器和遥控潜水器(rov)相比,uuv具有更多优势,包括灵活性、自主性和尺寸多样性等。这些特点使其更适合开展水下作业任务,包括但不限于地形扫描、海洋资源勘探、管道检查、水下搜救等。为保证uuv在三维空间运动中发挥准确高效的性能,动力学模型和精确控制算法起着至关重要的作用。此外,uuv的运动控制、深度跟踪控制技术对于实现高效运动具有重要意义,精确的深度跟踪控制技术在执行水下作业任务中发挥着重要作用。由于水下无人潜航器的非线性、强耦合性和参数不确定性,这些特点使其精确路径跟踪控制面临着巨大的挑战。无模型控制方法通过采用动态线性化获得的基于i/o数据的模型代替传统系统数学模型,为该问题提供了一种可靠有效的解决方案。然而,这种方法不可避免地排除了模型的高阶项,导致未建模动态存在,叠加外部扰动后则会进一步降低综合控制性能。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本技术提供了一种面向欠驱动无人潜航器深度跟踪的无模型自适应控制方法,其目的在于解决现有无模型控制方法应用于欠驱动无人潜航器深度跟踪后控制性能降低的技术问题。
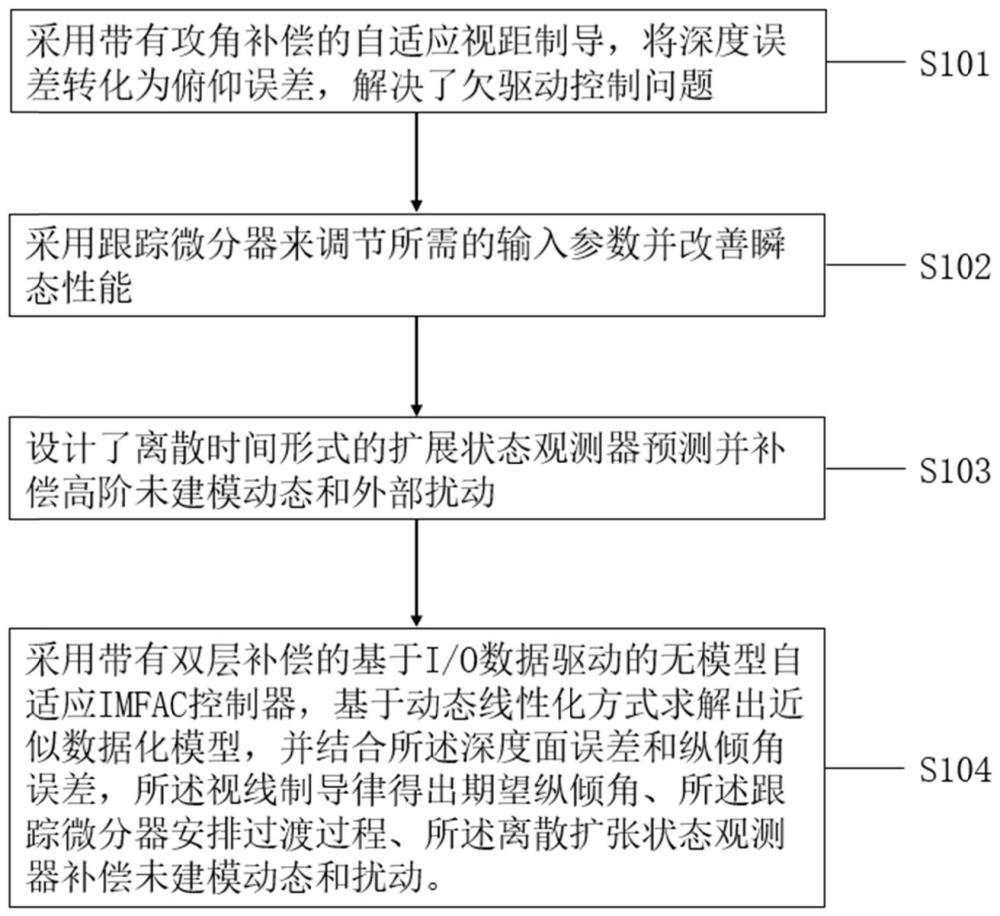
2、为实现上述目的,第一方面,本技术提供了一种面向欠驱动无人潜航器深度跟踪的无模型自适应控制方法,包括:
3、将潜航器实际深度和期望深度的深度误差转化为纵倾误差,基于自适应视线制导律获得带有攻角补偿的期望纵倾角;
4、采用跟踪微分器调节期望纵倾角;
5、基于动态线性化数据模型,结合所述深度误差、纵倾误差、期望纵倾角和跟踪微分器得到潜航器的期望控制舵角。
6、优选的,将潜航器实际深度和期望深度的深度误差转化为纵倾误差,具体为:
7、
8、
9、
10、其中,ex和ez为跟踪点坐标系轴向误差和横向误差;(xi,zi)为垂直面路径上第i个航点的位置,(xi+1,zi+1)为垂直面路径上第i+1个航点的位置,为旋转矩阵,γpath为垂直面的路径切向角,取值范围为(-π/2,π/2)。
11、优选的,所述自适应视线制导律为:
12、
13、
14、其中,θd为期望纵倾角,γpath为垂直面的路径切向角,为攻角估计值,为的微分形式,ez为跟踪点坐标系横向误差,δ为跟踪点坐标系下沿x轴向的前视距离,k为自适应增益。
15、优选的,所述动态线性化数据模型为:
16、δθ(s+1)=φp(s)δδs(s)+ξ(s)
17、其中,δθ(s+1)为s+1时刻纵倾角变化量,φp(s)∈r表示伪偏导数,通过伪偏导函数估计算法获得,r为实数集,δδs(s)为s时刻舵角输入变化量,ξ(s)为s时刻线性化数据模型的未建模及外部扰动的总变化量。
18、优选的,所述期望控制舵角为:
19、
20、其中,δs(s)和δs(s-1)分别为s时刻和s-1时刻的期望控制舵角,ρ∈(0,1]为步长参数,λ>0为限制系统输入变化的权重参数,kp和kd为控制增益,为s时刻线性化数据模型的未建模及外部扰动的总变化估计量,φp(s)∈r表示伪偏导数,通过伪偏导函数估计算法获得,r为实数集;eθ(s)和eq(s)为跟踪误差:
21、eθ(s)=x1(s+1)-θ(s)
22、eq(s)=x2(s+1)-q(s)
23、x1(s+1)为经过跟踪微分器调节后的s+1时刻期望纵倾角,x2(s+1)为跟踪微分器跟踪s+1时刻纵倾角的微分信号,θ(s)和q(s)分别为潜航器s时刻的实际纵倾角和实际纵倾角速度。
24、优选的,所述伪偏导函数估计算法具体为:
25、
26、其中,和为s时刻和s-1时刻伪偏导数φp(s)估计值,η∈(0,1]为引入的步长因子,μ为伪偏导函数估计值变化的惩罚因子,δδs(s-1)为s-1时刻的期望控制舵角的变化量,为s-1时刻线性化数据模型的未建模及外部扰动的总变化估计量,δy(s)为状态重组变化量,δy(s)=kpδθ(s)+kdδq(s),kp和kd为控制增益,δθ(s)和δq(s)分别为潜航器s时刻的实际纵倾角变化量和实际纵倾角速度变化量。
27、若满足|δδs(s-1)|≤ε或则其中,ε为预设常数,sign()是符号函数。
28、优选的,基于离散时间扩张状态观测器观测所述线性化数据模型的未建模及外部扰动的总变化量,所述离散时间扩张状态观测器为:
29、
30、
31、其中,ξ(s)和ξ(s+1)为s时刻和s+1时刻线性化数据模型的未建模及外部扰动的总变化量,z1(s)=θ(s),z2(s)=ξ(s),θ(s)为潜航器s时刻的实际纵倾角,和分别为z1(s)和z2(s)的估计值,φp(s)为伪偏导数,为φp(s)的估计值,δδs(s)为s时刻舵角输入变化量,h为采样步长,β01和β02为观测器增益,e1(s)和e2(s)为估计误差,
32、第二方面,本技术提供一种电子设备,包括:存储器,用于存储程序;处理器,用于执行存储器存储的程序,当存储器存储的程序被执行时,处理器用于执行第一方面或第一方面的任一种可能的实现方式所描述的方法。
33、第三方面,本技术提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,当计算机程序在处理器上运行时,使得处理器执行第一方面或第一方面的任一种可能的实现方式所描述的方法。
34、第四方面,本技术提供一种计算机程序产品,当计算机程序产品在处理器上运行时,使得处理器执行第一方面或第一方面的任一种可能的实现方式所描述的方法。
35、总体而言,通过本技术所构思的以上技术方案与现有技术相比,具有以下有益效果:
36、(1)本技术提供一种面向欠驱动水下无人潜航器深度跟踪的无模型自适应控制方法,针对欠驱动潜航器系统非线性、强耦合性和不确定性的特点,设计了一种由外到内的抗干扰、自适应无模型的双层跟踪控制方法。该方法通过深度误差转换纵倾误差,解决了欠驱动系统少控多问题,实时估计并自适应补偿由垂向速度产生的攻角,克服了由剩余浮力或环境扰动引入的制导偏差,从外环运动学层面提升制导精度。同时,本技术为期望输入纵倾角设计了跟踪微分器,平滑过渡跟踪输入信号,避免期望输入纵倾角变化过大,产生不合理现象。
37、(2)本技术内环动力学层采用高阶未建模动态及外部扰动补偿的增量式imfac控制算法,显著降低了输出舵角和频率,可以有效提高能源效率、降低机械噪音并延长执行机构的使用寿命。整套控制方法无需基于系统模型,特别适用于建模复杂或精度较低的潜航器。构建了基于离散时间的扩张状态观测器(deso),有效预测动态线性化数据建模过程产生的残余非线性内外扰动和不确定性,提升水下无人潜航器抗干扰能力和综合控制性能。
38、(3)为了能够使传统的imfac方法用于可旋转的无人潜航器上,本技术设计了一种将状态误差和误差的微分信号组合成线性状态误差反馈律(lsef),可以有效减少延迟和超调现象,降低震荡并减少收敛时间,进一步提高跟踪性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200114.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表