一种基于模糊控制的群集系统避险方法
- 国知局
- 2024-08-01 00:13:42
本发明涉及群集机器人领域,具体是一种基于模糊控制的群集系统避险方法。
背景技术:
1、群集运动是自然界中一种普遍存在的现象,只要我们仔细观察,就能在周围的生物群体中发现这种运动的迹象。例如,当我们抬头仰望天空时,常常会看到成群的鸟类,它们时而直线飞行,时而突然转向,这种行为似乎是一种有序的集体动作。这引发了研究者们的兴趣和思考:这些群体是如何做到几乎同时进行统一动作的呢?在探究这个问题的过程中,人们也观察到其他生物群体运动的现象,比如沙丁鱼群为了躲避天敌而结成队伍,蝗虫的集体跃迁,以及微观世界中细菌、细胞甚至蛋白质微管的集体移动。无论是哪种生物,群集运动都展示了一种协同合作的机制,为了生存和生活方式的需要而形成的有序运动。
2、这些现象看起来好像是由一个主体在操控,但实际上是由大量自主个体组成的群体所展现出来的。它们在飞行、巡游和移动过程中,是如何形成各种协调有序的集体运动模式的?又是如何迅速、几乎一致地响应外部作用并改变当前运动状态的?这种高度协调且极度有序的集体运动模式的产生机理和内在机制,长期以来一直是群集运动研究所关注的核心问题。
3、过去的研究中,针对群集系统的避险方法主要包括基于传统控制方法如比例积分微分控制、基于强化学习的方法如q学习等。这些方法在一定程度上可以解决群集系统避险的问题,但也存在着对环境变化敏感、难以处理复杂动态环境等挑战。近年来有研究者提出将模糊控制加入群集系统避险中这一想法。
4、模糊控制是一种基于模糊逻辑的控制方法,其核心思想是将不确定性因素引入控制系统,并通过模糊集、模糊规则和模糊推理来实现对系统的控制。模糊控制在处理非线性系统和具有不确定性的系统方面具有很好的效果。它能够有效处理系统中的不确定性因素,适应复杂的动态环境,并且具有良好的鲁棒性和实时性。基于模糊控制的群集系统避险方法有望在提高系统避险性能和适应性方面取得突破性进展。
技术实现思路
1、发明目的:本发明目的在于提供一种基于模糊控制的群集系统避险方法。通过避险信息模糊控制,制定基于模糊控制的群集系统避险方法,实现了群集系统避险效率一定程度上的优化。
2、技术方案:本发明的具体步骤如下:
3、s1:确定边长一定的无边界上下左右互通的二维空间,在范围内随机初始化若干个粒子和一个捕食者,初始参数包括粒子坐标,方向,粒子感受范围,粒子速率和捕食者速率。
4、s2:计算”粒子与邻居的平均距离“和“粒子与邻居距离的和的变化量”,作为模糊控制的输入。
5、s3:粒子根据模糊控制的输出量来调整自身运动方向。
6、s4:捕食者根据其感知半径内的粒子更新自己的方向。
7、s5:判断是否有粒子满足被捕食条件,并以此更新粒子的坐标和数量,并更新捕食者的坐标和方向。
8、s6:判断粒子数量是否满足结束条件,如果满足则退出,否则循环s2-s6。
9、步骤s1中,本实验的参数包括:二维空间长度l、粒子数量n、感知半径r、粒子速率vel、捕食者速率vb。
10、步骤s2中,模糊控制的输入为“粒子与邻居的平均距离”和“粒子与邻居距离和的变化量”。“粒子与邻居的平均距离”分为三类,近、中、远;“粒子与邻居距离和的变化量”分为nb、o、pb三个域,nb为[-100,-0.5],表示粒子远离粒子群或是感知范围内有粒子被捕食消失;o为[-0.5,10],表示离开小的粒子群或是附近有小的粒子群;pb为[10,100],表示附近粒子数量增加。
11、步骤s3中,输出量为“粒子前进角度的改变量”,分为“转弯”,“直行”,“掉头”。“转弯”范围[-0.4488 0.4488],“直行”范围[-0.05,0.05],“掉头”范围[2.7 3.5]。粒子感知范围内邻居数量(由输入量反映)增加不多时,选择“转弯”,一定范围内改变前进角度,探索较大的粒子群;粒子感知范围内邻居数量增加时,选择“直行”,加入粒子群;粒子感知附近粒子“掉头”(近乎掉头的角度),这种结果有两种情况导致:a.粒子被捕食,捕食者出现,粒子掉头离开;b.粒子正在离开粒子群,需要掉头返回。
12、步骤s4中,本实验中捕食者方向更新方法为:判断其感知半径内是否有粒子,如果有,则捕食者方向更新为从捕食者指向距离其最近的粒子的矢量的方向;否则,捕食者方向不改变。
13、步骤s5中,本实验中捕食条件为捕食者与距离其最近的粒子的距离是否小于等于捕食者的速率减去粒子的速率,如果是,则满足捕食条件,否则不满足捕食条件。如果不满足捕食条件,则粒子坐标更新为以其当前位置为起始点,指向该粒子方向,且大小为粒子速率的向量的顶点位置,粒子数量n不变,捕食者坐标更新步骤与粒子相同。如果满足捕食条件,则删除距离捕食者最近的粒子,粒子数量n减一,其余粒子坐标更新步骤同上,但捕食者坐标更新为被删除粒子的坐标更新后的位置,其方向更新为随机。
14、步骤s6中,本实验中,粒子数量减为初始粒子数量的10%时退出实验,以减少在实验粒子数量偏少的情况下大范围内捕食者与粒子无法互相感知而造成的大随机性对实验结果的影响。
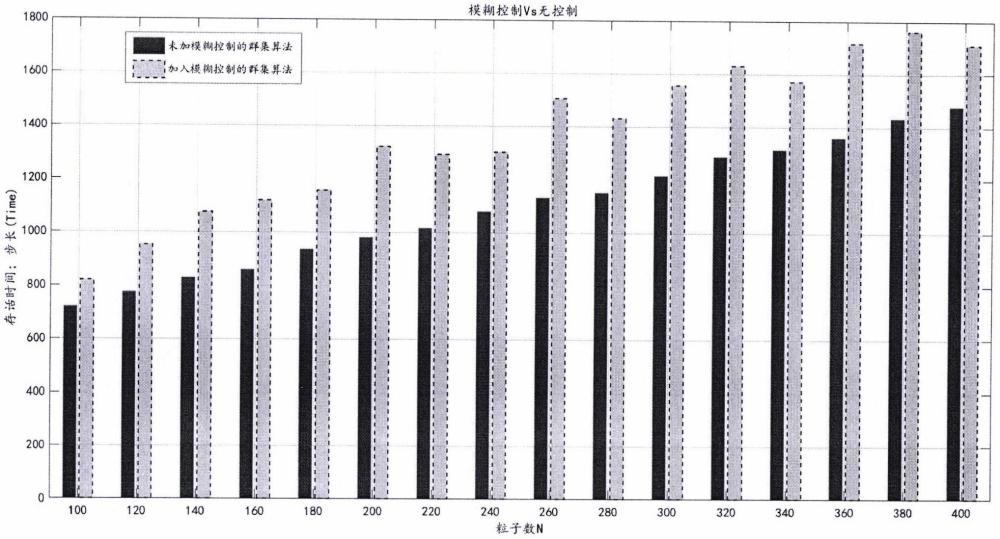
15、实验效果:在l为8,感知半径r=0.5,粒子速率vel=0.1,捕食者速率vb=0.2,粒子数量衰减为初始量20%停止的初始条件下。粒子数量n从100开始,每次增加20,n每次变换后进行实验20次,取总体结果平均值。
16、实验效果如下:
17、当n从100开始,每次增加20,n=400时停止实验,粒子总体存活时间平均增加24.41%。
18、附图表说明
19、图1是粒子数量在n=400时在加入模糊控制避险法和未加入模糊控制避险法两种情况下进行20次实验的总体粒子存活时间的关系图。
20、图2是粒子数量从n=100到n=400,加入模糊控制避险法和未加入模糊控制避险法两种情况下进行20次实验得到的存活时间平均值的对比图。
21、图3是粒子数量与粒子总体存活时间平均增加量的关系图。
22、图4是在n为400时加入避险方法模型的某时刻的粒子与捕食者位置图。
23、图5是在n为400时未加入避险方法模型的某时刻的粒子与捕食者位置图。
技术特征:1.一种基于模糊控制的群集系统避险方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于模糊控制的群集系统避险方法,其特征在于:以无边界模型来计算模糊控制输入,符合现实世界粒子避险范围的无界限要求。
3.根据权利要求1所述的一种基于模糊控制的群集系统避险方法,其特征在于:粒子感应到移动信息是由其他粒子的位置经过模糊控制输出后得到的。
4.跟俊权利要求1所述的一种基于模糊控制的群集系统避险方法,其特征在于:粒子在感知到周围有捕食者时就会掉头逃跑,符合自然规律。
5.根据权利要求1所述的一种基于模糊控制的群集系统避险方法,其特征在于:通过模糊控制逐步实现各个粒子的避险方向统一,聚合在一起,减少了捕食者捕食粒子的可能性。
6.根据权利要求1所述的一种基于模糊控制的群集系统避险方法,其特征在于:通过以上特征,加入模糊控制避险算法,可以提升各粒子在被捕食情况下的整体存活时间。
技术总结本发明属于群集机器人领域,具体是一种基于模糊控制的群集系统避险方法,包括:通过计算粒子运动方向模糊控制输入量,然后进行模糊控制得到输出量,对粒子运动方向进行控制,进而实现对捕食者的避险。实验结果表明:加入模糊控制算法比未加入的算法群体粒子总体平均存活时间增加显著。技术研发人员:卢新彪,代常宇,黄宝辉,黄家乐受保护的技术使用者:河海大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200106.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。