面向小型舰船着陆回收的无人机制导控制一体化设计方法
- 国知局
- 2024-07-31 23:48:40
本发明属于无人机领域,涉及一种无人机海上回收制导控制设计方法,具体涉及一种面向小型舰船着陆回收的无人机制导控制一体化设计方法。
背景技术:
1、利用小型舰船回收无人机时,由于回收装置大小的限制,需要无人机准确到达目标点并且满足末角约束,然而,船体移动、波浪引起的不规则摇晃等复杂因素使得无人机的高精度运动控制面临严峻挑战。采用制导控制一体化方法设计无人机的运动控制系统可以充分利用制导系统和控制系统间的耦合关系,从根本上提高整体系统的性能,使得无人机以更高的位置精度和姿态精度到达回收装置附近完成回收。现有的无人机着陆回收制导控制一体化方法以文献“固定翼无人机自动着陆的一体化制导控制,控制理论与应用,2016,doi:10.7641/cta.2015.50352”为代表。该文献在设计过程中并未显式地考虑无人机着陆回收时的末角约束,可能存在无人机在到达舰船回收装置附近时姿态角误差较大的问题。
技术实现思路
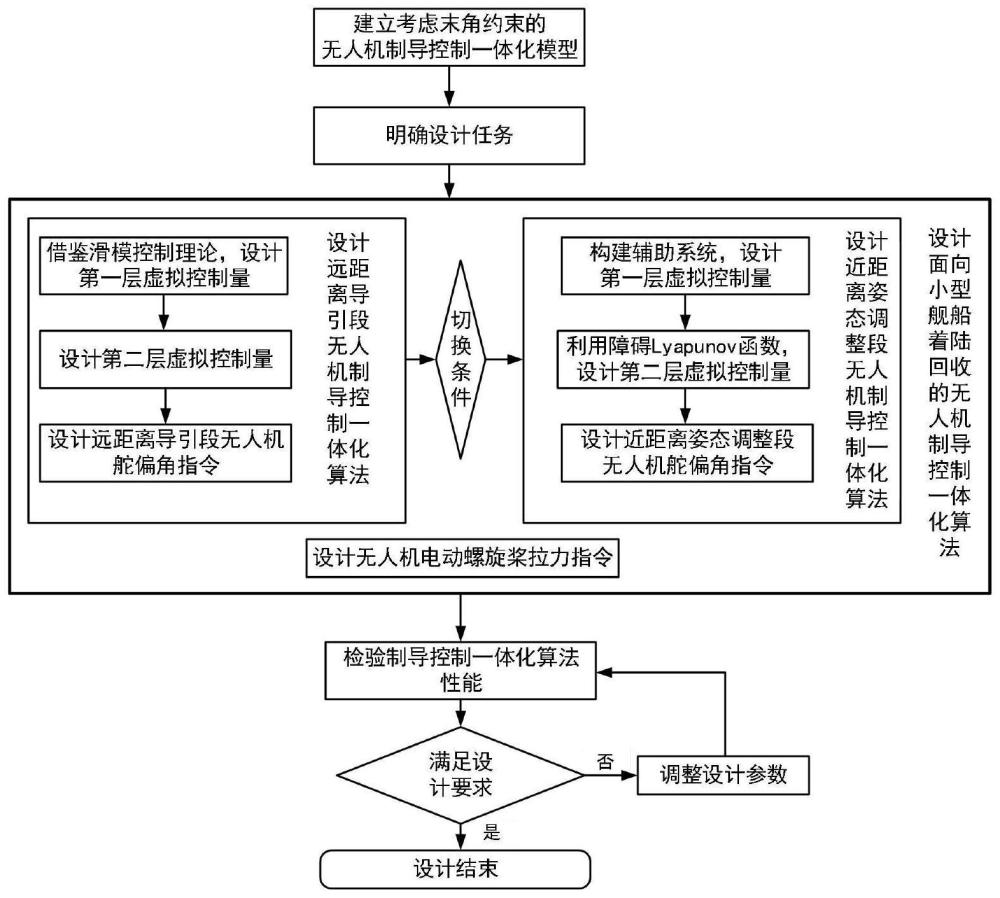
1、为了解决背景技术中记载的问题,本发明提出了一种面向小型舰船着陆回收的无人机制导控制一体化设计方法,设计过程分为远距离导引和近距离姿态调整两个阶段,根据距离条件进行切换,以降低单一制导控制一体化算法的保守性。在近距离姿态调整段的算法设计过程中,通过约束末端的攻角和视线角实现着陆回收末端的高精度姿态控制。保证无人机能够准确地到达舰船回收装置附近,并确保到达时刻无人机的姿态角满足安全、平稳着陆的精度要求。
2、为了实现上述目的,本发明采取以下技术方案:
3、一种面向小型舰船着陆回收的无人机制导控制一体化设计方法,包括以下步骤:
4、步骤一、建立考虑末角约束的制导控制一体化设计模型;
5、步骤二、明确制导控制系统的设计任务;
6、步骤三、设计远距离导引段无人机着陆制导控制一体化算法;
7、步骤四、设计进入姿态调整段的判断条件;
8、步骤五、设计近距离姿态调整段无人机着陆制导控制一体化算法;
9、步骤六、设计无人机电动螺旋桨拉力指令r;
10、步骤七、检验制导控制一体化算法的性能。
11、进一步的,步骤一的具体步骤为:无人机在纵向平面内的运动由如下一组非线性微分方程描述:
12、
13、其中,t为自开始时刻起无人机已飞行的时间,y为无人机高度,x为无人机水平位置,v为无人机飞行速度,θ为无人机速度矢量倾角,ωz为无人机俯仰角速度,为无人机俯仰角,α为无人机攻角,在纵向平面中有cx0,a,为无量纲的空气动力学系数,s为无人机最大横截面积,q=ρv2/2为速度压差,ρ为空气密度,m为无人机质量,g为重力加速度,r为无人机电动螺旋桨拉力指令,δb为无人机升降舵偏角指令,l为无人机长度,jz为无人机绕z轴的惯性矩;
14、无人机与舰船在纵向平面内的相对运动状态由视线倾角ε和相对距离r描述,它们的定义及满足的动态方程如下:
15、
16、其中,xb,yb为实现着陆回收时无人机所需要到达的终端位置,θb为舰船的速度矢量倾角,vb为舰船移动的速度;
17、式(1)和式(2)给出了纵向平面内无人机和待着陆舰船运动状态的完全描述,接下来利用它们建立考虑末角约束的无人机制导控制一体化设计模型:
18、由式(2)可知:
19、
20、无人机在纵向平面内的加速度满足
21、
22、其中,da为近似误差,故
23、
24、此时,视线倾角满足
25、
26、其中,dε1,dε由近似误差产生,此处将其视为有未知界的不确定性;
27、设εter表示期望的末端视线倾角,在无人机到达末端位置时有
28、
29、其中,θter为期望的末端速度矢量倾角;因此,当攻角约束在着陆回收要求的误差范围内时,下式成立:
30、
31、其中,为期望的末端俯仰角;此时,无人机回收过程的末角约束问题转化为在攻角受限条件下视线倾角收敛到期望的末端视线倾角的问题,亦即令视线倾角与期望的末端视线倾角间的偏差v=ε-εter收敛到零;同时,根据平行接近原理,无人机准确到达指定位置可由视线倾角速率偏差收敛到零保证;因此,建立如下考虑末角约束的制导控制一体化设计模型用于无人机着陆回收过程运动控制的设计:
32、
33、式中系数定义如下:
34、
35、
36、
37、d2,d3,d4为不确定性,满足|d2/a23|≤ρ2,|d3|≤ρ3,|d4/b4|≤ρ4,ρi,i=2,3,4为未知但有界的正数,该条件可由无人机的气动特性保证。
38、进一步的,步骤二中,所述制导控制系统的设计任务为:基于模型(4),设计无人机升降舵偏角指令δb(包含远距离导引段的升降舵偏角指令δb1和近距离姿态调整段升降舵偏角指令δb2)和无人机电动螺旋桨拉力指令r使在末端位置无人机视线倾角偏差v和视线倾角速率偏差被近似调节到零,误差绝对值的上界分别设为δ1和δ2,同时末端攻角αter满足|αter|<αmax,其中αmax为根据末端姿态角精度的要求给出的末端攻角最大允许值,以保证无人机到达回收装置时满足位置精度和姿态精度的要求。
39、进一步的,所述步骤三包括以下步骤:
40、s1:借鉴滑模控制理论,设计第一层虚拟控制量αd;
41、定义
42、
43、其中,c1>0为设计参数;根据滑模控制理论,通过调节z2并且合理选择c1可以使得v和最终满足设计精度要求;z2满足如下动态方程:
44、
45、构造第一层虚拟控制量αd及第二层的参考信号αc分别为
46、
47、其中,k21>0,ε2>0,τ3>0为设计参数,为未知参数ρ2在远距离导引段的估计值,
48、此处通过设计令其满足如下动态方程
49、
50、其中,λ21>0,σ21>0为设计参数;定义z3=α-αc,y3=αc-αd,则有
51、
52、定义未知参数ρ2在远距离导引段的估计误差为根据a23的定义及其表达式中各参数和变量的物理意义可知,a23<0;定义则有
53、
54、s2:设计第二层虚拟控制量ωzd
55、对z3求导可知
56、
57、构造第二层虚拟控制量ωzd及第三层的参考信号ωzc分别为
58、
59、其中,k31>0,ε3>0,τ4>0为设计参数,为未知参数ρ3在远距离导引段的估计值,此处通过设计令其满足如下动态方程
60、
61、其中,λ31>0,σ31>0为设计参数,定义z4=ωz-ωzc,y4=ωzc-ωzd,则有
62、
63、定义未知参数ρ3在远距离导引段的估计误差为并定义则有
64、
65、s3:设计远距离导引段无人机升降舵偏角指令δb1;
66、对z4求导可知
67、
68、构造远距离导引段无人机升降舵偏角指令δb1为
69、
70、其中,k41>0,ε4>0为设计参数,为未知参数ρ4在远距离导引段的估计值,此处通过设计令其满足如下动态方程
71、
72、其中,λ41>0,σ41>0为设计参数;在远距离导引段无人机升降舵偏角指令δb1作用下,z4满足如下动态方程
73、
74、定义未知参数ρ4在远距离导引段的估计误差为根据b4的定义及其表达式中各参数和变量的物理意义可知,b4<0,定义则有
75、
76、定义闭环系统lyapunov函数为v1=v21+v31+v41,则有
77、
78、对于和经过计算可知它们满足如下关系:
79、
80、
81、其中,p1和p2为连续正值函数;对于任意q1>0,集合为一个紧集,因此连续正值函数p1和p2在bq1上有最大值,分别设为m1和m2,其中m1依赖于设计参数k21,λ21,ε2和σ21,m2依赖于设计参数k21,k31,τ3,λ21,λ31,ε2,ε3,σ21和σ31;由式(21)可知,只要设计参数k21,k31,k41满足设计参数τ3,τ4满足设计参数λ21,λ31,λ41,σ21,σ31,σ41满足λ21σ21>k3,λ31σ31>k3,λ41σ41>k3,其中k3>0为设计参数,闭环lyapunov函数便满足下式
82、
83、其中,若选择k3>o1/q1,则在v1(0)≤q1的情况下,有v1(t)≤q1,t≥0,即是说bq1是闭环系统的一个正不变集,因此闭环系统状态z2,z3,z4保持有界;进而有
84、
85、根据v1的定义可知,可以通过调整设计参数使得z2,z3,z4的最终上界任意小,从而保证无人机能够以良好的姿态进入近距离调整阶段;
86、s4:综合前述s1-s3,得到远距离导引段无人机着陆制导控制一体化算法如下所示:
87、
88、其中,设计参数的取值范围为:c1>0,k21>0,ε2>0,τ3>0,λ21>0,σ21>0,k31>0,ε3>0,τ4>0,λ31>0,σ31>0,k41>0,ε4>0,λ41>0,σ41>0,这些参数具体数值的选取需要根据具体的应用场景确定。
89、进一步的,步骤四中,定义设计参数rsw>0为切换距离,当r<rsw时,无人机进入近距离姿态调整阶段,此时制导控制一体化算法由步骤三中的算法切换为步骤五中的算法。
90、进一步的,步骤五中,为了保证到达舰船的回收装置时无人机的攻角限定在末端姿态精度要求的范围内,在近距离姿态调整阶段的设计过程中对虚拟控制量进行饱和处理,并引入辅助变量消除饱和处理带来的影响,具体设计过程如下:
91、步骤1:构造辅助系统,设计第一层虚拟控制量αd2;
92、定义
93、
94、其中,参数c1>0同步骤三中的设计参数,w为辅助变量,用于消除第一层虚拟控制量设计过程饱和处理产生的影响,其设计如后所述,对z22求导可得
95、
96、构造第一层的虚拟控制量αd2并对其进行滤波和限幅处理得到第二层的参考信号αc2
97、
98、其中,αf为虚拟控制量αd2的滤波值,k22>0,τ3>0,η>0,kw>0为设计参数,并且需要满足αmax为容许的最大攻角,为未知参数ρ2在近距离姿态调整段的估计值,此处通过设计令其满足如下动态方程
99、
100、其中λ22>0,σ22>0为设计参数,定义z32=α-αc2,y32=αf-αd2,此时z22满足如下动态方程
101、
102、根据式(27),构造辅助系统为
103、
104、此时,
105、
106、定义未知参数ρ2在近距离姿态调整段的估计误差为定义则有
107、
108、步骤2:借助障碍lyapunov函数,设计第二层虚拟控制量ωzd2;
109、对z32求导可得
110、
111、构造第二层虚拟控制量ωzd2及第三层的参考信号ωzc2分别为
112、
113、其中,k32>0,ε3>0,τ4>0为设计参数,为未知参数ρ3在近距离姿态调整段的估计值,此处通过设计令其满足如下动态方程
114、
115、其中,λ32>0,σ32>0为设计参数,定义z42=ωz-ωzc2,y42=ωzc2-ωzd2,则有
116、
117、定义未知参数ρ3在近距离姿态调整段的估计误差为并定义则有
118、
119、步骤3:设计近距离姿态调整段无人机升降舵偏角指令δb2;
120、对z42求导可得
121、
122、构造近距离姿态调整段无人机升降舵偏角指令δb2为
123、
124、其中,k42>0,ε4>0为设计参数,为未知参数ρ4在近距离姿态调整段的估计值,此处通过设计令其满足如下动态方程
125、
126、其中λ42>0,σ42>0为设计参数,定义未知参数ρ4在近距离姿态调整段的估计误差为定义则有
127、
128、定义闭环系统lyapunov函数为v2=v22+v32+v42,则有
129、
130、对于和经过计算可知它们满足如下关系:
131、
132、
133、其中,p12和p22为连续正值函数;对于任意q2>0,集合为一个紧集,因此连续函数p12和p22在bq2上有最大值,分别设为m12和m22,其中m12依赖于设计参数k22,η,ε2,λ22和σ22,m22依赖于设计参数k22,k32,kw,kb,τ3,η,λ22,λ32,ε2,ε3,σ22和σ32,那么m12和m22也分别是和绝对值的上界;由式(40)可知,只要设计参数k22,k32,k42满足参数τ3,τ4满足设计参数λ22,λ32,λ42,σ22,σ32,σ42满足λ22σ22>k4,λ32σ32>k4,λ42σ42>k4,其中k4>0为设计参数,闭环lyapunov函数满足如下关系
134、
135、其中,若选择k4>o2/q2,则在v2(0)≤q2的情况下,有v2(t)≤q2,t≥t,这里t表示无人机远距离导引段飞行的时间,即是说bq2是闭环系统的一个正不变集,因此闭环系统状态z22,z32,z42保持有界;进而有
136、
137、此时,由v2的定义可得若进入姿态调整阶段时z32的初值满足|z32(0)|<kb,在整个姿态调整阶段进一步有:
138、
139、同时,根据闭环lyapunov函数的定义及其满足的关系还可知,那么z22的最终界为在系统褪饱和后,即αc=αf,辅助变量w将渐近收敛到零,则v和的最终界分别为和只要参数k4满足即可保证无人机以期望的位置精度和姿态精度到达回收装置完成着陆。
140、步骤4:综合前述步骤1-步骤3,得到近距离姿态调整段无人机着陆制导控制一体化算法如下所示:
141、
142、其中,设计参数选取范围为:c1>0,k22>0,η>0,τ3>0,σ22>0,λ22>0,ε2>0,k32>0,τ4>0,σ32>0,λ32>0,ε3>0,k42>0,σ42>0,λ42>0,ε4>0;这些参数具体数值的选取需要根据实际的应用场景确定。
143、进一步的,步骤六,考虑以下两方面无人机速度对回收末段的影响:首先,通过分析攻角和速度的关系,从无人机与舰船的相对距离到达切换距离前一段时间开始,依靠拉力主动提高无人机的速度,可以减小无人机进入近距离姿态调整段时攻角,降低步骤四中算法设计的保守性;其次,增大无人机在回收末段的飞行速度可以在回收失败的情况下提供二次回收的可能,避免无人机由于速度过低掉入海中造成不必要的损失,因此,从无人机进入近距离姿态调整段前一段距离开始,设计无人机电动螺旋桨拉力指令根据实际需求提升无人机末段飞行速度;
144、定义设计参数rswv>rsw为开始产生拉力指令的相对距离,定义ev=v-vr,其中vr为期望的末段无人机速度,构造近距离姿态调整段无人机电动螺旋桨拉力指令r为
145、r=qs(cx0+aα2)+mgsinθ-mkvev (42)
146、其中,kv>0为设计参数,定义则有
147、
148、合理选取设计参数kv,可以使得e渐近收敛到零,此时,在回收的末段无人机将以期望速度飞行,进一步,可以保证在回收失败的情况下存在二次回收的可能。
149、进一步的,步骤七中,为了检验所设计的面向小型舰船着陆回收的无人机制导控制一体化算法的性能,需将其应用于无人机在纵向平面内的非线性制导与控制系统,借助常用的计算机数值计算和仿真软件中来进行,在允许的范围内选择好设计参数后,进行仿真计算并进行性能检验,如果制导控制一体化算法的性能满足要求,则设计结束;否则,需要调整设计参数,重新进行仿真计算并进行性能检验。
150、与现有技术相比,本发明的有益效果是:
151、本发明克服了采用现有无人机着陆回收制导控制一体化设计方法可能导致末端姿态角误差较大的不足,提供了一种面向小型舰船着陆回收的无人机制导控制一体化设计方法,通过约束末端攻角和视线角显式地保证了无人机末端姿态角精度,同时,仅在近距离姿态调整段考虑末角约束,通过引入切换机制降低了采用单一制导控制一体化算法的保守性。由于末端位置精度和姿态精度是影响无人机面向舰船回收成功与否的重要因素,因此本发明可以提高回收的可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198623.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表