一种面向配电网络巡检的无人机轨迹规划方法及系统
- 国知局
- 2024-07-31 23:44:48
本发明涉及无人机巡检,尤其涉及一种面向配电网络巡检的无人机轨迹规划方法及系统。
背景技术:
1、无人机凭借其优势在工业界运用广泛。巡检是配电网络不可或缺的项目,具有巡检距离长,覆盖面积广,所在区域较为偏僻等特点,传统人工巡检需要花费巨大人力和物力,且具有较高潜在危险性。为降低风险和提高巡检效率,使用无人机对配电网络巡检成为一个可行方案,不仅能避免人力巡检的危险因素,还能通过无人机的高机动性极大的提升巡检效率。对于无人机而言,影响其巡检效率的最大因素在于其轨迹,通过规划高效的无人机轨迹,能进一步提升配电网络巡检效率。
2、但是,现阶段无人机硬件条件不足以支撑其进行长时间飞行。其中一种解决方法是配合额外设置的无人机平台,在巡检过程中多次返回平台充电。该返回平台充电过程会为无人机带来额外的时间成本。因此,如何在考虑无人机电量限制条件下,合理规划其轨迹成为难点和重点。
技术实现思路
1、本发明目的在于提出一种面向配电网络巡检的无人机轨迹规划方法及系统,在考虑无人机电量限制条件下,合理规划其轨迹。
2、为达到上述目的,本发明方法的技术方案为:
3、一种面向配电网络巡检的无人机轨迹规划方法,包括如下步骤:
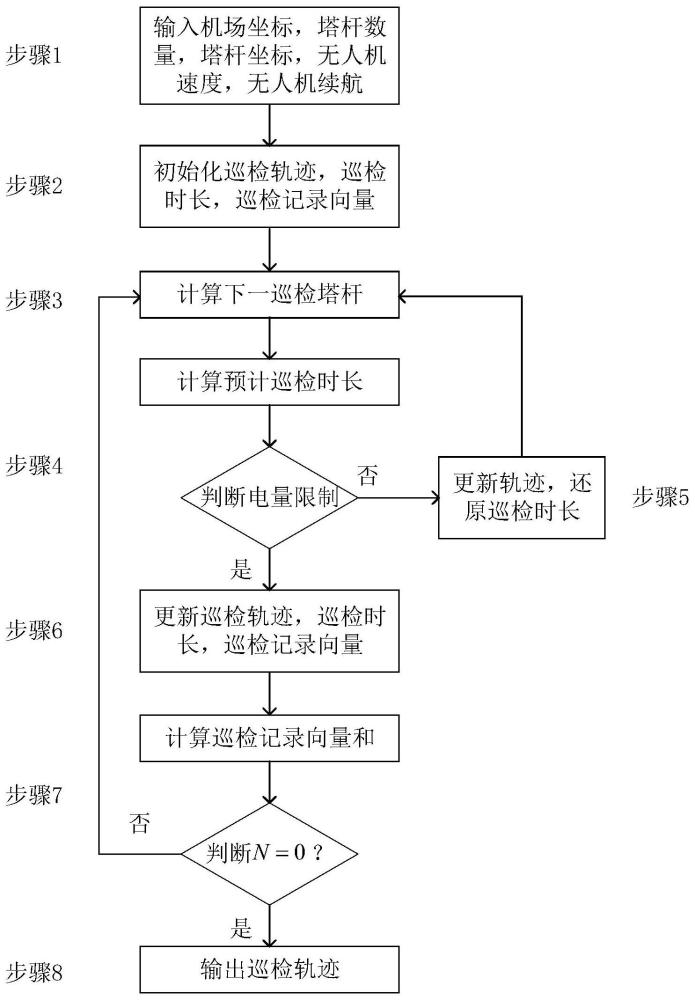
4、步骤s1、输入机场坐标(ωx,ωy)、塔杆数量k、各塔杆坐标(xk,yk)、无人机速度v以及无人机续航时间t;
5、步骤s2、将巡检时长和时长迭代次数初始化,将巡检轨迹初始化,将巡检记录向量初始化,将轨迹迭代次数初始化;
6、步骤s3、计算无人机当前位置与各塔杆之间的有效距离向量,选择有效距离向量中最小数值元素所在位置i为下一巡检塔杆编号;
7、步骤s4、计算无人机当前位置到下一巡检塔杆预计巡检时长判断是否满足电量限制若是,进入步骤s5,否则进入步骤s6;
8、步骤s5、无人机回到机场进行充电,更新巡检轨迹,更新轨迹迭代次数,还原巡检时长,之后返回步骤s3;
9、步骤s6、更新巡检轨迹和巡检时长,更新轨迹迭代次数,更新时长迭代次数,更新巡检记录向量;
10、步骤s7、计算巡检记录向量和n,判断其是否等于0,若是,进入步骤s8,否则返回步骤s3;
11、步骤s8:输出巡检轨迹。
12、进一步地,所述s1中塔杆坐标矩阵为:
13、m=[x1,y1;x2,y2;..;xk,yk;..,;xk,yk]
14、其中,m为塔杆坐标矩阵,(xk,yk)为第k个塔杆坐标,k为塔杆数量。
15、进一步地,所述步骤s2中将巡检时长初始化为:
16、
17、其中,为第0次时长迭代的巡检时长。
18、所述将时长迭代次数初始化为:
19、m=0
20、其中,m为时长迭代次数。
21、将巡检轨迹初始化为:
22、traj0=[ωx,ωy]
23、其中,traj0为第0次轨迹迭代的巡检轨迹,(ωx,ωy)为机场坐标;
24、所述将轨迹迭代次数初始化为:
25、j=0
26、其中,j为轨迹迭代次数。
27、所述将巡检记录向量初始化为:
28、l=[1,2,..l(i)..,k]
29、其中,l为巡检记录向量,l(i)为巡检记录向量中第i个元素,k为塔杆数量。
30、进一步地,所述步骤s3包括如下子步骤:
31、步骤3.1:计算距离向量d
32、
33、其中,d为距离向量,trajj为第j次轨迹迭代的巡检轨迹,trajj(end,1:2)为第j次轨迹迭代的巡检轨迹最末行的第一到第二列元素组成的坐标,j为轨迹迭代次数,||||2为向量的二范数运算;
34、步骤3.2:计算有效距离向量
35、
36、其中,为有效距离向量,d为距离向量,l为巡检记录向量,==为提取元素数值相等位置运算,l==0为提取巡检记录向量l中等于0的元素所在位置,d(l==0)为将距离向量d中对应巡检记录向量l中等于0的元素所在位置上的距离修正为109;
37、步骤3.3:有效距离向量中最小数值元素所在位置i即为下一巡检塔杆编号。
38、进一步地,所述步骤s4中预计巡检时长为:
39、
40、其中,为预计巡检时长,为第m次时长迭代的巡检时长,m为时长迭代次数,τ为每个塔杆巡检时间,(ωx,ωy)为机场坐标,(xi,yi)为第i个塔杆坐标,i为下一巡检塔杆编号。
41、进一步地,所述步骤s5中更新巡检轨迹为:
42、trajj+1=[trajj;ωx,ωk]
43、其中,trajj第j次轨迹迭代的为巡检轨迹,j为轨迹迭代次数,[]为向量组合运算;
44、所述步骤s5中更新轨迹迭代次数为:
45、j=j+1
46、其中,j为轨迹迭代次数。
47、步骤5所述还原巡检时长为:
48、
49、其中,为巡检时长,m为时长迭代次数。
50、进一步地,所述步骤s6更新巡检轨迹为:
51、trajj+1=[trajj;xi,yi]
52、其中,trajj为第j次轨迹迭代的巡检轨迹,j为轨迹迭代次数,(xi,yi)为第i个塔杆坐标,i为下一巡检塔杆编号,[]为向量组合运算;
53、所述步骤s6中更新轨迹迭代次数为:
54、j=j+1
55、其中,j为轨迹迭代次数。
56、所述更新巡检时长为:
57、
58、其中,为第m次时长迭代的巡检时长,m为时长迭代次数,τ为塔杆巡检时间,v为无人机速度,trajj为第j次轨迹迭代的巡检轨迹,trajj(end,1:2)为第j次轨迹迭代的巡检轨迹最末行的第一到第二列元素组成的坐标,j为轨迹迭代次数,||||2为向量的二范数运算,(xi,yi)为第i个塔杆坐标,i为下一巡检塔杆编号;
59、所述更新时长迭代次数为:
60、m=m+1
61、其中,m为时长迭代次数。
62、步骤6所述更新巡检记录向量为:
63、l(i)=0
64、其中,l为巡检记录向量,l(i)为巡检记录向量中第i个元素,i为下一巡检塔杆编号。
65、进一步地,所述步骤s7所述计算巡检记录向量和:
66、n=sum(l)
67、其中,n为巡检记录向量和,l为巡检记录向量,sum()为所有元素求和运算。
68、另一方面,本发明提供一种面向配电网络巡检的无人机轨迹规划系统,包括:
69、模块一,其用于输入机场坐标(ωx,ωy)、塔杆数量k、各塔杆坐标(xk,yk)、无人机速度v以及无人机续航时间t;
70、模块二,其用于将巡检时长将轨迹迭代次数初始化,将巡检轨迹初始化,将巡检记录向量初始化,将轨迹迭代次数初始化;
71、模块三,其用于计算无人机当前位置与各塔杆之间的有效距离向量,选择有效距离向量中最小数值元素所在位置i为下一巡检塔杆编号;
72、模块四,其用于计算无人机当前位置到下一巡检塔杆预计巡检时长判断是否满足电量限制若是,进入模块五,否则进入模块六;
73、模块五,其用于无人机回到机场进行充电,更新巡检轨迹,更新轨迹迭代次数,还原巡检时长,之后返回步骤s3;
74、模块六,其用于更新巡检轨迹和巡检时长,更新轨迹迭代次数,更新时长迭代次数,更新巡检记录向量;
75、模块七,其用于计算巡检记录向量和n,判断其是否等于0,若是,进入步骤模块八,否则返回模块三;
76、模块八,其用于输出巡检轨迹。
77、与现有技术相比,本发明具有如下有益效果:
78、针对现有大规模配电网络巡检策略的不足,针对基于无人机的配电网络按需巡检需求,本发明提供一种面向配电网络巡检的无人机轨迹规划方法,旨在降低人工巡检成本和提高配电网络巡检效率。该发明在满足配电网络巡检需求的前提下,通过尽可能降低巡检无人机单次传输任务周期,采用改进贪婪算法设计巡检无人机轨迹,以及相应的轨迹求解方案,力求在满足配电网络巡检需求的前提下最小化巡检无人机的单次巡检任务周期。
79、本发明提出一种面向配电网络巡检的无人机轨迹规划方法。该轨迹规划策略使巡检无人机基于巡检需求对配电网络进行按需巡检,并获取配电网络和巡检无人机系统参数。针对由塔杆组成的配电网络进行建模,通过改进贪婪算法设计巡检无人机运动方案,实现对配电网络的按需巡检。该问题以配电塔杆的巡检需求为限制,以最小化巡检无人机单次巡检任务周期为目标,对问题进行求解,最终得到了无人机单次巡检任务周期的高效任务轨迹。巡检无人机的任务轨迹在满足配电网络最小巡检需求的前提下,最大程度考虑了电量限制,同时达到了最小化无人机单次巡检任务周期的目的。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198400.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。