一种用于隧道结构检测的轨道机器人控制系统及工作方法
- 国知局
- 2024-07-31 23:44:44
本发明涉及巡检机器人领域,尤指一种用于隧道结构检测的轨道机器人控制系统及工作方法。
背景技术:
1、现有的隧道检测工作由于其特殊的环境和工作需求,常规检测方法存在效率低下、安全性差等问题。由于隧道直径较大,检测隧道顶部的某些位置十分困难。现有常规检测方法为检测员在装载机上的铲斗中,托举检测设备,让设备紧贴隧道衬砌表面,实现采集数据。
2、虽然目前已经出现了隧道巡检机器人,例如申请号为202210508116.0,名称为:《用于隧道内巡检的轨道机器人》的发明人的在先申请,其能代替巡检人员进行周期巡视检查,且具有检测效率高、检测结果准确、自动化、稳定、安全等优点。上述隧道巡检机器人虽然能解决部分问题,但随着检测需求的增加,隧道检测机器人所需要检测的病害信息类型正逐渐增多,检测空间范围增大,所需要的机器人结构及其控制系统也更为复杂。对于过于特殊的检测机器人结构,难以建立合适的控制系统,使其稳定地完成检测任务。其结构和控制系统的复杂性也在提升,使得稳定、高效的检测任务完成变得困难。且这些隧道结构检测技术还存在定位累积误差、控制不便等问题,因此,需要一种新型的轨道机器人控制系统来解决这些问题。
技术实现思路
1、为解决上述问题,本发明提出一种用于隧道内巡检的轨道机器人控制系统,旨在解决这些问题,提高检测的精度、稳定性及系统的可维护性和可扩展性。本发明主要目的在于,提供一种基于轨道机器人的控制系统及工作方法。
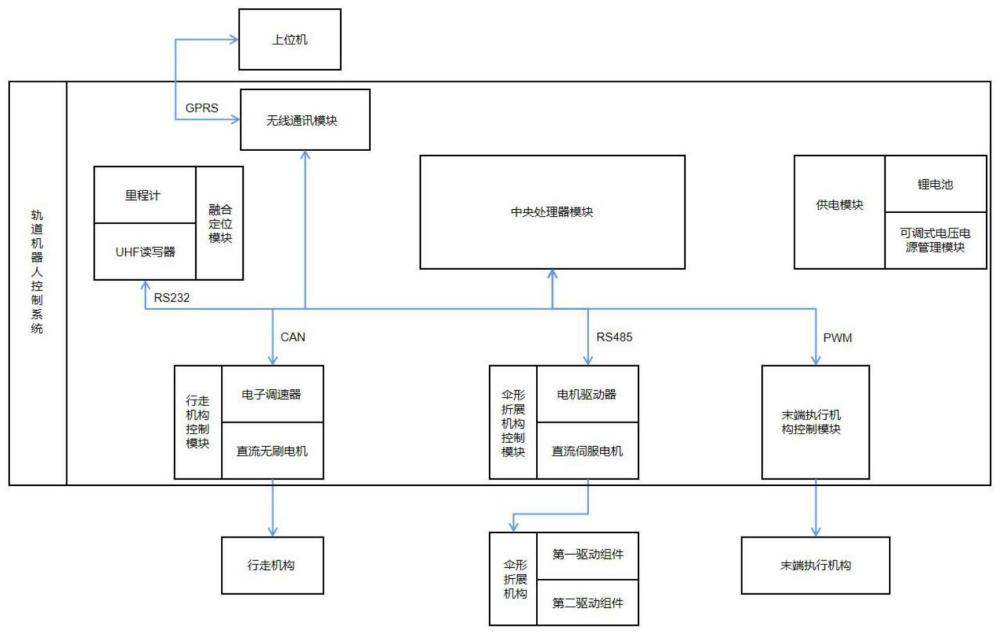
2、为实现上述目的,本发明提供了一种轨道机器人控制系统,用于隧道内巡检的轨道机器人控制,该系统包括行走机构控制模块、融合定位模块、伞形折展机构控制模块、末端执行机构运动控制模块、无线通讯模块、中央处理器模块和供电模块。这些模块通过中央处理器模块进行协调和控制,实现了轨道机器人的稳定行走、精确定位、末端执行机构的精确控制以及远程通信等功能。
3、进一步的,本发明提供的一种用于隧道结构检测的轨道机器人控制系统,可包括:
4、行走机构控制模块,采用直流无刷电机及电子调速器,通过can总线与中央处理器通信,接收中央处理器的指令控制直流无刷电机输入电流,从而控制轨道机器人运动。同时,电子调速器向中央处理器实时反馈电机的当前转速,使得中央处理器模块可由此得到机器人累计运动距离,将其计入里程计,实现机器人沿轨道的精确控制;
5、融合定位模块,运用rf i d无线射频识别技术,通过uhf读写器读取固定电子标签信息,修正里程计累计误差,确保机器人位置准确性;
6、伞形折展机构控制模块,由直流伺服电机及电机驱动器构成,通过rs485接口与中央处理器交互,根据modbus通信协议接收中央处理器的指令控制直流伺服电机转动指定角度,驱动伞形折展机构运动,控制末端执行机构到达指定位置;
7、末端执行机构运动控制模块,采用四个数字舵机及继电器,通过gpio接口输出pwm信号控制末端执行机构姿态并控制电源通断;
8、即所述中央处理器模块可通过gpio接口输出pwm信号控制舵机旋转至指定角度,以此实现对末端执行机构姿态的控制。同时,中央处理器可通过继电器控制舵机电源,以此避免gpio接口未输出pwm信号期间数字舵机接收到干扰信号而随机转动。
9、无线通信模块,使用gsm/gprs模块及tcp/ip协议,与上位机建立远程通信,保证指令传输不受距离限制;
10、具体而言,所述无线通信模块通过usart串口连接中央处理器模块,使用gsm/gprs模块根据tcp/ip协议与上位机进行无线通信,从而实现中央处理器与上位机之间的数据传输。
11、其中,上位机所下发的指令包括行走机构目标运动距离、伞形折展机构驱动组件旋转角度,以及末端执行机构舵机旋转角度。中央处理器模块反馈的数据包括所接收的指令内容、行走机构当前运动速度与距离。
12、所述中央处理器模块,可使用stm32主控芯片,集成多种通信接口,并负责整体电子元件的协调控制,实现上述电子元件的总体控制;
13、供电模块,采用24v可充电锂电池配合可调降压模块,满足各个模块的电源需求。
14、具体来说,行走机构控制模块通过控制直流无刷电机驱动机器人沿轨道方向运动;融合定位模块利用里程计实时反馈机器人沿轨道方向的运动距离,并通过uhf读写器读取固定于轨道上方的电子标签校正里程计的累积误差;伞形折展机构控制模块通过控制直流伺服电机驱动伞形折展机构带动末端执行机构运动至指定位置;末端执行机构运动控制模块通过控制数字舵机旋转角度来实现对末端执行机构姿态的精确控制;无线通讯模块采用gsm/gprs模块实现机器人与上位机的远程通信;中央处理器模块采用stm32主控芯片实现对各模块的总体控制;供电模块通过可充电式锂电池供电,并通过可调式电压电源管理模块向各模块提供所需的工作电压。
15、具体而言,所述中央处理器模块包括can、rs232、rs485转ttl通信模块,以此实现行走机构控制模块、融合定位模块、伞形折展机构控制模块与中央处理器模块之间的通讯。
16、具体而言,根据无线通讯模块所接收的行走机构目标运动距离,所述中央处理器模块进行运动速度规划,并根据直流无刷电机的速度反馈计算电机所需驱动电流,周期性地向电子调速器发送对应的控制指令。
17、具体而言,根据无线通讯模块所接收的伞形折展机构驱动组件旋转角度,所述中央处理器模块向电机驱动器发送对应的控制指令。指令包括电机目标旋转角度以及电机最大旋转速度。其中第二驱动组件中电机转动角度与伸展杆旋转角度比例恒定,但第一驱动组件中根据伸展杆张开角度无法通过初等函数得到对应电机转动角度,中央处理器模块需要完成对应的角度换算。
18、具体而言,根据自定义的通信协议,上位机将周期性地向中央处理器模块发送指定格式的信息。当中央处理器模块在指定的时长内未收到对应的信息,将视为无线通信中断。此时中央处理器模块将控制无线通信模块重启,重新建立通信。
19、本发明还提供了一种轨道机器人控制系统的工作方法,可应用于上述轨道机器人控制系统,包括以下步骤:
20、1)启动机器人,中央处理器初始化并建立与其他模块的通讯连接;
21、2)根据上位机通过无线通讯模块发送的目标运动距离、伞形折展机构驱动组件旋转角度、末端执行机构舵机旋转角度等指令,中央处理器进行相应控制;
22、3)控制行走机构、伞形折展机构及末端执行机构执行指令,并实时反馈机器人的运动状态给上位机;
23、4)定期校正里程计误差,通过rs232接口接收融合定位模块提供的位置信息,并反馈给上位机;
24、5)当出现无线通信中断情况时,自动重启无线通信模块,恢复通信连接;
25、6)周期性执行此循环程序,持续监控并调整轨道机器人运动及工作状态。
26、本发明有益效果在于,本发明提供了一种针对隧道内部检测应用的轨道机器人控制系统,借助上述技术方案,具备行走稳定、末端执行精准、远程通信可靠等特点。系统各个模块相互独立又协同工作,通过中央处理器模块进行综合调度和控制。融合定位模块结合多种定位技术有效修正定位误差,无线通信模块克服了距离限制,确保了指令的实时传递与反馈。此外,系统采用模块化设计,便于后期维护和功能扩展,适用于隧道结构变形及渗漏水等多种病害检测任务的需求。
27、相对于现有技术,本发明至少具有如下特点与优势:
28、1.实现了模块化的控制系统设计,便于维护与升级;
29、2.通过融合定位模块有效校准里程计误差,确保机器人沿轨道方向运动距离的精确度;
30、3.结构中的伞形折展机构控制模块使末端执行机构具备灵活多变的运动能力,适应复杂的工作环境;
31、4.无线通信模块保障了远程指令传递和状态反馈的有效性,扩大了机器人的工作范围;
32、5.整个系统设计合理,运行稳定,适用于隧道结构病害(如变形、渗漏水等)的高效精准检测。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198396.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表