一种无人驾驶车辆避障规划控制方法及系统
- 国知局
- 2024-07-31 23:44:30
本发明涉及一种无人驾驶车辆避障规划控制方法及系统。
背景技术:
1、随着传感器、计算机和控制技术软硬件的快速发展,无人驾驶车辆在过去几十年中取得了重大进展,发展智能无人驾驶车辆为缓解交通安全问题以及改善环境问题提供了一个高效而崭新的思路。环境感知和车辆避障是无人驾驶车辆中两大重要的子系统,在环境感知系统中,通过视觉处理系统使得车辆能够直接获取周围环境中障碍物类别等信息。在车辆避障系统中,横纵向避障控制可以降低因紧急制动而产生追尾等安全事故的概率。研究无人驾驶车辆避障控制及路径规划具有重要的实际意义。
2、目前国内无人驾驶车辆在避障控制技术及路径规划方面尚且不足,主要是识别速度不够快、准确性不够高和控制不够灵敏。多数的路径规划算法建立过多的约束问题并使用约束度过高的车辆模型从而达到期望路径的规划效果。带来的后果就是模型以及算法的复杂度高,避障控制趋于复杂降低灵敏度,安全性得不到保障。基本侧重于研究单方面的控制问题或者路径规划方法,忽略了两者之间的有机结合。目前关于安全这方面的评价始终得不到社会的认可。
技术实现思路
1、本发明的目的在于克服现有的缺陷而提供的一种无人驾驶车辆避障规划控制方法及系统,使无人驾驶车辆在检测到周围障碍物时,能够实时执行最优避障控制策略及规划局部最优路径,主动避免事故的发生,提高安全性。
2、实现上述目的的技术方案是:
3、本发明之一的一种无人驾驶车辆避障规划控制方法,包括:
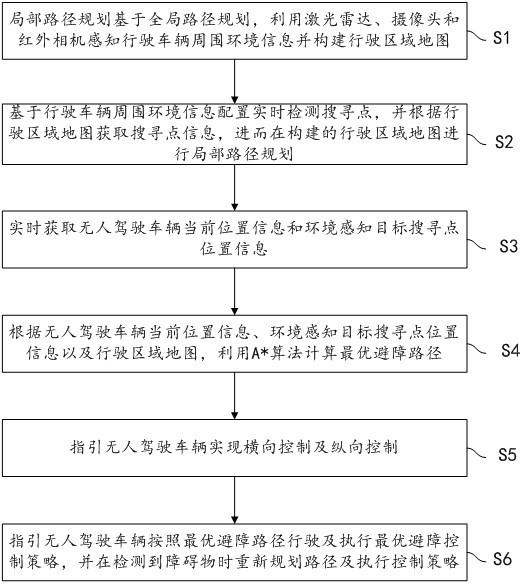
4、步骤s1,局部路径规划基于全局路径规划,利用激光雷达、摄像头和红外相机感知行驶车辆周围环境信息并构建行驶区域地图;
5、步骤s2,基于行驶车辆周围环境信息配置实时检测搜寻点,并根据行驶区域地图获取搜寻点信息,进而在构建的行驶区域地图进行局部路径规划;
6、步骤s3,实时获取无人驾驶车辆当前位置信息和环境感知目标搜寻点位置信息;
7、步骤s4,根据无人驾驶车辆当前位置信息、环境感知目标搜寻点位置信息以及行驶区域地图,利用a*算法计算最优避障路径;
8、步骤s5,指引无人驾驶车辆实现横向控制及纵向控制;
9、步骤s6,指引无人驾驶车辆按照最优避障路径行驶及执行最优避障控制策略,并在检测到障碍物时重新规划路径及执行控制策略。
10、优选的,所述步骤s1中,全局路径规划是指从起始点到终止点的路径,局部路径规划是在全局路径上的局部规划,具有矢量性,包含时间、速度大小和方向。
11、优选的,所述步骤s2中,搜寻点包括激光雷达、摄像头和红外相机采集的图像数据动态点、静止点和参照点;搜寻点信息包括搜寻点位置信息及搜寻点之间的连通关系;具体包括:
12、步骤s21,基于搜寻点位置信息及搜寻点之间的连通关系建立数据识别库;
13、步骤s22,从数据识别库中读取搜寻点位置信息及搜寻点之间的连通关系;
14、步骤s23,根据搜寻点位置信息及搜寻点之间的连通关系计算搜寻点之间的距离;
15、步骤s24,将搜寻点之间的距离作为权值,根据搜寻点之间的连通关系进行局部路径规划。
16、优选的,所述步骤s4包括:
17、步骤s41,根据环境感知目标搜寻点位置信息和行驶区域地图,计算得到每个目标搜寻点与其他目标搜寻点之间的最短路径;
18、步骤s42,利用a*算法根据每个目标搜寻点与其他目标搜寻点之间的最短路径生成对目标搜寻点的最优避障路径,并根据最优避障路径执行最优控制策略。
19、优选的,所述步骤s4中,a*算法的计算公式如下:
20、;
21、式中,表示从起点到当前节点的估计总代价,表示从起点到当前节点的实际代价,表示从当前节点到目标节点的估计代价。
22、优选的,所述步骤s5中,根据最优控制策略通过mpc模糊预测控制器对无人驾驶车辆执行横向控制;
23、根据最优控制策略通过pid控制器执行纵向速度控制;
24、其中,通过mpc模糊预测控制器指引无人驾驶车辆方向盘进行转向控制,pid控制器指引电机转矩进行调整、对制动踏板进行控制和速度进行控制。
25、优选的,所述步骤s5中,mpc模糊预测控制器中的mpc算法实现对无人驾驶车辆执行横向控制,其车辆二自由度运动微分方程式如下:
26、;
27、;
28、其中,表示车辆的总质量,表示车辆质心速度在轴上的分量,表示车辆的横向加速度,表示车辆质心处的横摆角速度,表示车辆横摆角加速度,表示车辆绕轴的转动惯量,、分别表示车辆前后轮胎的侧偏刚度,表示车辆质心侧偏角,表示车辆前轮转角,、分别表示质心到前轮和后轮的距离;
29、车辆横摆动力学模型:
30、;
31、其中,表示车辆的总质量,表示车辆的纵向速度,表示车辆的横向速度,表示车辆的横向加速度,表示车辆质心处的横摆角速度,表示车辆横摆角速度的变化率,表示车辆绕轴的转动惯量,、分别表示车辆前后轮胎的侧偏刚度,表示车辆前轮转角,、分别表示质心到前轮和后轮的距离;
32、将上式化为状态空间方程:
33、;
34、其中,表示车辆的横向运动状态;和分别为输出矩阵和输入矩阵,表示控制输入量,表示状态量;
35、将车辆动力学模型中的精确量转化为模糊量,通常采用中心点法或梯形法进行模糊化;
36、根据实际情况制定模糊规则,用于描述车辆动力学模型的输入与输出之间的关系;
37、根据模糊规则进行推理,得到预测控制输出;
38、将模糊输出转化为精确输出,用于实际mpc模糊预测控制器的输入;
39、pid控制器中的pid算法实现对无人驾驶车辆执行纵向速度,pid算法时间连续公式如下:
40、;
41、其中,表示控制器的输出,是比例增益,是积分时间常数,是微分时间常数,是系统误差,是系统误差函数从0到t的时间积分,是系统误差函数的时间微分。
42、优选的,所述步骤s6包括:
43、步骤s61,指引无人驾驶车辆检测到障碍物时执行最优控制策略,并采集无人驾驶车辆周围环境信息;
44、步骤s62,根据无人驾驶车辆周围环境信息计算可行走宽度,并判断无人驾驶车辆是否能够绕开障碍物;
45、步骤s63,若无人驾驶车辆能够绕开障碍物时,指引无人驾驶车辆绕开障碍物后继续按照最优局部路径规划行驶;
46、步骤s64,若无人驾驶车辆无法绕开障碍物时,采取紧急停车避障策略,获取障碍物位置信息并将行驶区域地图中包括障碍物所在位置的连通关系删除,得到避障行驶区域地图;
47、步骤s65,获取无人驾驶车辆当前位置信息及下一个目标搜寻点位置信息,并根据避障行驶区域地图重新规划最优避障路径;
48、步骤s66,无人驾驶车辆无法规划避障路径时,生成报错信号并输出。
49、优选的,所述步骤s63中,无人驾驶车辆能够绕开障碍物时,可行走宽度满足如下关系式:
50、;
51、其中,为无人驾驶车辆转弯半径,为预设的膨胀半径,为可通过行驶宽度。
52、本发明之二的一种无人驾驶车辆避障规划控制系统,包括:
53、环境感知模块,用于通过识别激光雷达、摄像头和红外相机采集的行驶车辆周围环境信息并构建行驶区域地图;
54、配置模块,用于基于行驶车辆周围环境信息配置实时检测搜寻点,并根据行驶区域地图获取搜寻点信息;
55、定位模块,用于实时获取无人驾驶车辆当前位置信息和环境感知目标搜寻点位置信息;
56、计算模块,用于根据无人驾驶车辆当前位置信息、环境感知目标搜寻点位置信息以及行驶区域地图,利用a*算法计算最优避障路径;
57、路径规划模块,用于根据搜寻点信息进行路径规划;
58、横向控制模块,用于控制无人驾驶车辆方向盘转角;
59、纵向控制模块,用于控制无人驾驶车辆制动踏板及电机转矩;
60、避障模块,用于指引无人驾驶车辆按照最优路径行驶及执行最优控制避障策略,并在检测到障碍物时重新规划路径及执行控制策略。
61、本发明的有益效果是:通过车载激光雷达、摄像头和红外相机采集行驶车辆周围环境信息并构建行驶区域地图,在识别到的障碍物位置信息与无人驾驶车辆高精度位置信息之间实时进行避障路径规划,同时运用mpc和pid算法对无人驾驶车辆进行横纵向控制,使无人驾驶车辆在检测到周围障碍物时,能够实时执行最优避障控制策略及规划局部最优路径,有效应对各种情况,主动避免事故的发生,提高安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198379.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表