一种农机装备的远程智能运维控制方法及控制系统与流程
- 国知局
- 2024-07-31 23:44:23
本发明属于智能农机装备的电控系统,具体涉及一种自主作业多功能动力平台—农机装备的远程程序更新及远程智能运维的综合控制方法及控制系统。
背景技术:
1、农机装备中的辣椒智能直播机是一种具有节省人力,降低劳动强度且控制精确下种和施肥的智能化直播机械。目前辣椒智能直播机具有旋耕、播种、施肥等功能。整机作业时出现农机具不提升、整机车速变慢/变快、整机仅能倒车等问题现象,且农户处于北京、河南、山东、安徽等外地,需要技术人员到现场实地排查问题,影响农忙时节的整机作业进度等;有时候仅需更新一版整机控制程序,仍需要技术或售后人员到现场下载程序完成更新;在产线装配重要零部件或售后更换重要零部件后,如机具角度传感器、变速箱电动推杆等,需要技术或售后人员到现场重新标定,售后工作效率低,成本高,且影响用户使用作业和用户的使用体验。随着技术的进步,满足前述辣椒智能直播机整机运维方面的农机自动化、智能化技术成为急需。
技术实现思路
1、针对背景技术提出的问题,本发明的目的就是提供一种农机装备的远程智能运维控制方法及控制系统,其基于4g/5g无线网络及相关通讯协议,完成远程更新的版本程序的下载和状态读取;设计远程智能维护上位机平台,通过命令启动系统远程维护程序,通过100毫秒循环自学习角度传感器、转速传感器等值,智能化判断各传感器、传动系统等的状态,并自我维护相关初始化标定值或进行逻辑合理性故障诊断并提示;通过强制驱动结合反馈施肥轴转速等智能诊断农机装备中的活动部件驱动故障,并将故障或维护状态通过远程反馈至远程智能维护上位机平台进行显示;通过远程通讯结合eeprom内存驱动程序,远程便捷快速调整前进、后退、避障的车速和加速性能等,并通过反馈的状态,自动判断是否达到工作区间车速值,从而完成智能化标定过程,进一步提高了农机装备整机运维的自动化和智能化水平。
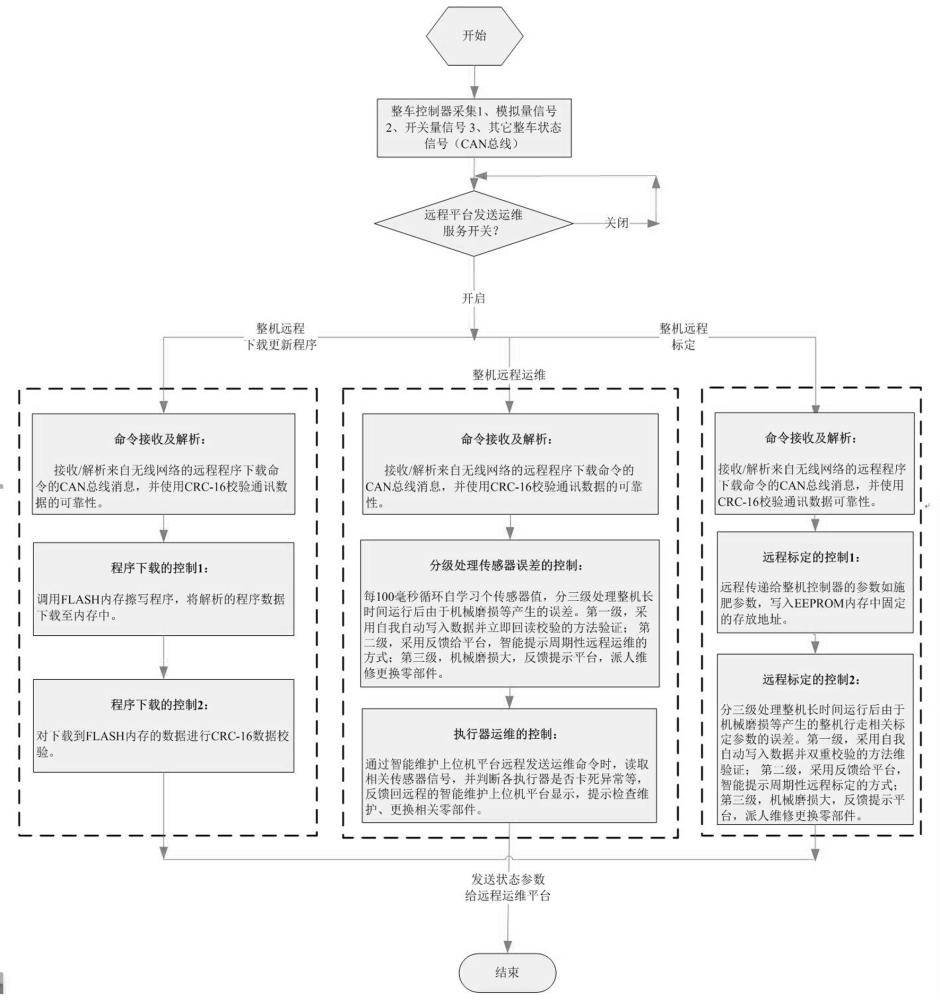
2、为了实现上述目的,本发明所采用的技术方案是:一种农机装备的远程智能运维控制方法,该控制方法由控制系统按照以下三个方面对农机装备进行远程智能运维控制:
3、(1)整机远程下载更新程序的控制
4、控制系统中的远程智能维护上位机平台,基于4g/5g无线网络,利用mqtt、https协议,将握手连接命令、程序升级命令和升级所需的二进制更新版本程序文件通过can总线传递给农机装备上的整机控制器,整机控制器进行消息接收/解析、flash内存擦写、回读内存数据并校验后,通过can总线和4g/5g无线网络将程序下载更新的状态反馈给远程智能维护上位机平台,完成整机控制器的程序升级工作;
5、(2)整机远程运维的控制
6、控制系统中的远程智能维护上位机平台向整机控制器发送启动运维命令,整机控制器采集、每100毫秒循环自学习农机装备中变速箱电动推杆初始空挡的中位电压值和机具角度传感器值,并分别与eeprom内存中保存的各自的标定值进行对比,再按照差值绝对值自动分三等级进行处理维护;
7、第一级,差值绝对值与原标定值的比值不超过3%时,整机控制器以当前值与原标定值的平均值作为新的标定值,写入eerom内存中进行存储,以补偿农机装备长时间运行后由于机械磨损产生的微小误差,实现整机自动地自我维护功能,在每次新的标定值写入eeprom内存后,整机控制器立即回读该新的标定值并校验当前值与原标定值,以确保标定数据写入的可靠性;
8、第二级,差值绝对值与原标定值的比值小于10%且大于3%时,整机控制器远程向远程智能维护上位机平台反馈状态,远程智能维护上位机平台智能提示,该零部件需定期周期性远程运维;
9、第三级,差值绝对值与原标定值的比值大于10%时,整机控制器远程向远程智能维护上位机平台反馈状态,远程智能维护上位机平台智能提示,需派人员现场对农机装备进行检查维护或更换相关关键零部件;
10、控制系统中的远程智能维护上位机平台向整机控制器发送农机装备中各个动作部件的驱动命令,整机控制器读取各个动作部件驱动后的状态参数值,并与其各自的原设定值进行比较,以判定各个动作部件是否存在损坏或异常,整机控制器将判定信息反馈至远程智能维护上位机平台,远程智能维护上位机平台智能提示,是否需要检查维护或更换相关零部件;
11、(3)整机远程标定的控制
12、控制系统中的远程智能维护上位机平台向整机控制器发送启动标定系统的命令,并将农机装备中变速箱电动推杆初始空挡的中位电压值、机具角度传感器值、施肥参数、农机具最高工作位置和最低工作位置数据传递给整机控制器,整机控制器通过调用eeprom内存,将上述数据写入固定的存放地址中;
13、使用遥控器将农机装备遥控行驶至空旷地,远程智能维护上位机平台远程模拟遥控器对农机装备发送前进或后退命令,整机控制器实时读取无人驾驶控制器传送的卫星定位的车速信号,并以此为基准,实时调整前进速度/加速系数、后退速度/加速系数,使农机装备的车速在5秒内达到默认目标车速1km/h,并与eeprom内存中保存的前进速度/加速系数、后退速度/加速系数标定值进行对比,再按照差值绝对值自动分三等级进行远程标定维护;
14、第一级,差值绝对值与原标定值的比值小于3%时,整机控制器以当前值与原标定值的平均值作为新的标定值,写入eerom内存中进行存储,以补偿农机装备长时间运行后由于机械磨损产生的微小误差,实现整机自动地自我维护功能,在每次新的标定值写入eeprom内存后,整机控制器立即回读该新的标定值并校验当前值与原标定值,以确保标定数据写入的可靠性;
15、第二级,差值绝对值与原标定值的比值大于3%小于10%时,整机控制器远程向远程智能维护上位机平台反馈状态,远程智能维护上位机平台智能提示,该零部件需定期周期性远程运维;
16、第三级,差值绝对值与原标定值的比值大于10%时,整机控制器远程向远程智能维护上位机平台反馈状态,远程智能维护上位机平台智能提示,需派人员现场对农机装备进行检查维护或更换相关关键零部件。
17、进一步的,在整机远程下载更新程序的控制过程中,远程智能维护上位机平台通过应用crc-16多项式校验算法,对发送和接收通讯的每个字节消息进行校验;整机控制器通过flash内存擦写将程序写入flash程序存储区后,应用crc-16多项式校验算法,对刷写内存的程序进行校验。
18、进一步的,在整机远程运维的控制过程中,农机装备中动作部件的驱动包括电动推杆伸出/缩回、播种风机运转、施肥电机运转和机具提升/下降;整机控制器读取的状态参数值包括电动推杆位置电压、播种风机出口气压压力、施肥电机转速和机具角度传感器位置值。
19、进一步的,在整机远程标定的控制过程中,第一级远程标定维护时,整机控制器将所有更新的新的标定值组建成标定数据块,利用crc-16多项式校验算法,对标定数据块进行校验。
20、进一步的,所述的农机装备为辣椒直播机、智能水稻直播机、玉米直播机电控拖拉机、智能辣椒收获机和智能芦苇收割机中的任意一种。
21、一种农机装备的远程智能运维控制系统,包括远程智能维护上位机平台、智能网关、整机控制器、通讯模块、输出模块、用于信号采集的传感器、用于执行控制器命令的执行器;
22、所述的传感器包括机具角度传感器、播种风机出口气压压力传感器、车速传感器、电动推杆位置传感器、施肥电机轴转速传感器;所述的执行器包括电动播种风机、变速箱电动推杆、农机具提升/下降电磁阀、施肥电机;所述的通讯模块为can通讯模块,输出模块包括pwm输出模块和数字输出模块do。
23、本发明的有益效果是:
24、1、本发明提出的控制方法通过远程智能维护上位机平台,基于4g/5g无线网络通信及通信协议,远程传递更新版本程序文件,并通过应用crc-16多项式校验算法,对发送和接收通讯的每个字节消息进行校验、确保远程传递更新程序的可靠性。同时在进入程序刷写进程后,通过flash内存擦写程序,将程序写入flash程序存储区,并应用crc-16多项式校验算法,对刷写内存的程序进行校验,确保了刷写程序与更新程序的一致性及刷写的可靠性,通过双重crc-16多项式校验算法的应用,却确保了远程下载更新程序的可靠性;其次,系统每100毫秒循环自学习变速箱电动推杆初始空挡的中位电压值、农机具角度传感器值等与控制器eeprom内存中标定的初始空挡的中位电压值、农机具角度传感器值(农机具最高位置角度值/农机具最低位置角度值)比较,系统按照差值绝对值自动分等级处理维护,第一级,实现整机的自动地自我维护功能,以补偿整机长时间运行后由于机械磨损等产生地误差,同时,通过在每次更新的标定值在写入eeprom后,立即回读校验两值,确保标定数据写入的可靠性。第二级,整机控制器远程反馈状态,在远程智能维护上位机平台智能提示需定期周期性远程运维的功能。第三级,整机控制器反馈回远程的智能维护上位机平台显示,提示系统需要派人员现场检查维护或更换关键零部件。提高了整机售后运维的效率。
25、2、本发明的控制方法通过远程智能维护上位机平台远程发送关键零部件驱动命令时,同时,整机控制器读取相关传感器值信号,整机控制器根据值的合理范围,自动判断电动推杆是否卡死、伸出/缩回不到位、施肥电机/播种风机是否烧毁、农机具提升/下降电磁阀是否烧毁或液压系统异常等,并将相关状态反馈回远程的智能维护上位机平台显示,提示系统需要检查维护、更换相关零部件,提升了执行器零部件故障诊断的效率和诊断准确度。系统实现远程标定施肥作业、机具位置、整车前进/后退行走等执行器的相关参数,采用与之前描述类似的三级分类形式处理,不同的是由于执行器标定参数的重要性,不仅与作业相关,还涉及执行器动作的安全性,所以采用了标定数据单值回读校验合并标定数据块校验的“双重校验”方式,确保了标定数据的准确性与可靠性。
26、3、本发明的控制方法综合实现了整机系统及关键零部件的远程智能标定、远程智能诊断功能、远程程序更新下载的功能。本系统智能化,自动化水平较高,降低了技术人员或售后服务人员的劳动强度,提升了服务工作的质量与效率。本发明的系统及方法也可推广应用于电控拖拉机、智能辣椒收获机、智能芦苇收割机等智能农机装备的远程运维技术上,适用范围较广。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198372.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。