一种仿真植物模型开合控制结构及其控制系统的制作方法
- 国知局
- 2024-07-31 23:44:14
本发明涉及仿真模型控制,具体为一种仿真植物模型开合控制结构及其控制系统。
背景技术:
1、随着人们生活水平的提高,对于生活和工作环境的美观和舒适度要求也越来越高,仿真植物模型因其易维护、美观和可定制性而受到欢迎,同时仿真植物模型作为一种替代真实植物的选择,可以减少对水资源和化肥的需求,降低维护成本,实现环境美化的效果,为提高植物仿真模型的吸引力和真实感,因此需要提供一种仿真植物模型开合控制结构及其控制系统,使仿真植物模型能够模拟真实植物的运动。
2、例如公告号为:cn108153990b的发明专利,公开的一种大气污染响应的植物智能体模型设计方法,包括剂量-反应模型及参数化定义部分,其通过对植物agent的反应趋势进行模拟,得到描述外源污染物与植物生理反应之间关系的s形剂量反应曲线,以及定义该曲线所需的四个参数;植物agent内部状态集合部分,其基于第一部分剂量-反应的植物响应模式,选取四个属性来抽象表达植物的个体伤害差异,定义植物agent的状态属性信息;植物agent适应性行为规则部分,其选取植物对大气污染物的反应强度指标,细化衡量植物agent受损程度的规则,并在植物agent的适应性建模上,通过植物agent行为规则和植物agent适应性参数的变化来实现植物对响应环境的动态改变,建立植物agent运行过程。
3、例如公告号为:cn111814303b的发明专利,公开的一种植物根系力学模型构建方法、装置及电子设备,该方法包括:获得生长时间与植物根系的各级根的长度的第一映射关系;获得生长时间与植物根系的各级根的直径的第二映射关系;根据第一映射关系、第二映射关系及生长时间生成各级根模型;对各级根模型进行真实性模拟,获得具有真实形态的植物根系模型;将根系力学参数赋予植物根系模型,获得基于植物真实形态的根系力学模型;从而有效地改善了难以准确地模拟出植物根系的真实根系形态及力学特征的难题。
4、基于上述方案发现,目前对仿真植物模型控制方面还存在一些不足,具体体现在以下几个层面:(1)当前仿真植物模型缺少依据环境特征进行动态拟合的方法,无法适应环境变化,真实性不足。
5、(2)当前仿真植物模型缺少对各控制节点的位置特征进行分析的方法,无法对仿真植物模型进行精确控制,影响整体性能的仿真效果,降低用户体验。
技术实现思路
1、针对现有技术的不足,本发明提供了一种仿真植物模型开合控制结构及其控制系统,能够有效解决上述背景技术中涉及的问题。
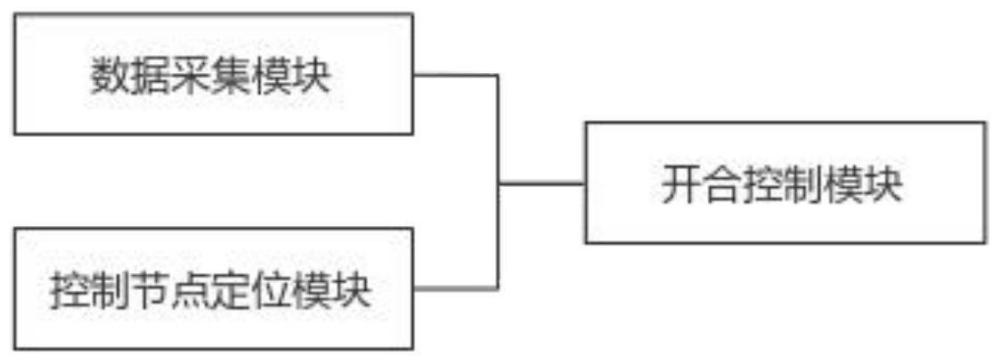
2、为实现以上目的,本发明通过以下技术方案予以实现:本发明第一方面提供了一种仿真植物模型开合控制系统,包括:数据采集模块:获取仿真植物模型的基础数据,并对仿真植物模型工作区域的环境参数进行采集。
3、控制节点定位模块:对茎段开合驱动装置和叶片开合驱动装置的控制节点进行定位,提取控制节点定位信息。
4、开合控制模块:依据仿真植物模型的基础数据、工作区域环境参数和控制节点定位信息,调节各控制节点的摆动幅度和摆动方向,并对各控制节点的温度进行控制。
5、作为进一步的方法,所述获取仿真植物模型的基础数据,其中基础数据具体包括:胸高直径、树高和树冠宽度。
6、作为进一步的方法,所述对仿真植物模型工作区域的环境参数进行采集,具体采集过程包括:将仿真植物模型工作区域部署若干环境监测点,采集各环境监测点的环境参数,包括环境温度、环境湿度、光照强度、环境风速和环境风向。
7、作为进一步的方法,所述对茎段开合驱动装置和叶片开合驱动装置的控制节点进行定位,提取控制节点定位信息,具体过程为:将各茎段开合驱动装置控制节点和各叶片开合驱动装置控制节点分别标记为各茎段控制节点和各叶片控制节点。
8、提取仿真植物模型的自体垂直中轴线,标记为标准中心轴,采集各茎段控制节点和各叶片控制节点距离水平地面的垂直高度,标记为各茎段控制节点和各叶片控制节点的垂直高度,并采集各茎段控制节点和各叶片控制节点与标准中心轴的水平间隔距离,标记为各茎段控制节点和各叶片控制节点的水平分布距离。
9、将各茎段控制节点和各叶片控制节点的垂直高度以及各茎段控制节点和各叶片控制节点的水平分布距离联合记为控制节点定位信息。
10、作为进一步的方法,所述调节各控制节点的摆动幅度和摆动方向,并对各控制节点的温度进行控制,具体分析过程为:依据仿真植物模型的基础数据,分析处理得到仿真植物模型特征值,并依据仿真植物模型工作区域的环境参数,分析处理得到仿真植物模型工作区域的环境特征值。
11、对仿真植物模型特征值和环境特征值进行综合分析,得到仿真植物模型控制节点综合特征值,将仿真植物模型控制节点综合特征值与仿真植物模型数据库中存储的各综合特征值区间对应的摆动幅度和温度进行匹配,得到仿真植物模型控制节点的摆动幅度和温度,标记为预置起始摆动幅度和预置起始温度。
12、依据环境风向对各控制节点的摆动方向进行调节,调整各控制节点的摆动方向与环境风向一致。
13、依据控制节点定位信息,综合分析得到各茎段控制节点和各叶片控制节点的点位特征值,并对点位特征值进行分析处理,得到各茎段控制节点和各叶片控制节点的修正摆动幅度和修正调节温度。
14、将预置起始摆动幅度与修正摆动幅度进行累加处理,得到各茎段控制节点和各叶片控制节点的最终控制摆动幅度,将预置起始温度与修正调节温度进行累加处理,得到各茎段控制节点和各叶片控制节点的最终调节温度。
15、依据各茎段控制节点和各叶片控制节点的最终控制摆动幅度和最终调节温度,对各控制节点进行控制调节。
16、作为进一步的方法,所述仿真植物模型控制节点综合特征值,表示对仿真植物模型的基础数据和工作区域环境参数进行综合分析得到的量化特征值,用于作为控制节点的摆动幅度和温度的调节依据。
17、作为进一步的方法,所述仿真植物模型控制节点综合特征值,具体计算表达式为:式中,β表示仿真植物模型控制节点综合特征值,α1表示仿真植物模型特征值,α2分别表示仿真植物模型工作区域的环境特征值,ζ1表示设定的仿真植物模型特征值对应的特征评估影响因子,ζ2表示设定的环境特征值对应的特征评估影响因子。
18、作为进一步的方法,所述仿真植物模型特征值,具体分析计算过程为:从仿真植物模型数据库中获取仿真植物模型的参照标准胸高直径、参照标准树高和参照标准树冠宽度,分析计算得到仿真植物模型特征值,具体计算表达式为:式中,α1表示仿真植物模型特征值,e表示自然常数,l、h和b分别表示仿真植物模型的胸高直径、树高和树冠宽度,l0、h0和b0分别表示参照标准胸高直径、参照标准树高和参照标准树冠宽度,ψ1、ψ2和ψ3分别表示设定的胸高直径、树高和树冠宽度对应的模型特征影响因子。
19、作为进一步的方法,所述仿真植物模型工作区域的环境特征值,具体分析计算过程为:从仿真植物模型数据库中获取参照标准环境温度、参照标准环境湿度、参照标准光照强度和参照标准环境风速,分析计算得到仿真植物模型工作区域的环境特征值,具体计算表达式为:式中,α2表示仿真植物模型工作区域的环境特征值,qi、wi、pi和vi分别表示第i个环境监测点的环境温度、环境湿度、光照强度和环境风速,q0、w0、p0和v0分别表示参照标准环境温度、参照标准环境湿度、参照标准光照强度和参照标准环境风速,ξ1、ξ2、ξ3和ξ4分别表示设定的环境温度、环境湿度、光照强度和环境风速对应的环境特征影响因子,i表示各环境监测点的编号,i=1,2,3,...,n,n表示环境监测点的总数。
20、本发明第二方面提供了一种仿真植物模型开合控制结构,包括:驱动装置,所述驱动装置是开合动作的执行机构,用于根据控制系统的指令来收缩或扩展机械结构,模拟仿真植物模型的生长动态,包括茎段开合驱动装置和叶片开合驱动装置。
21、环境传感器,所述环境传感器用于采集仿真植物模型工作区域的环境参数。
22、开合控制单元,所述开合控制单元用于接收传感器的数据,并根据预设的控制系统的控制程序调节驱动装置,控制机械结构的开合。
23、温度控制单元,所述控制系统的温度控制单元用于调节叶片部位和茎段部位的温度,控制改变叶片部位和茎段部位材料的颜色。
24、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
25、(1)本发明通过提供一种仿真植物模型开合控制结构及其控制系统,对仿真植物模型特征和环境特征进行量化评估,依据仿真植物模型的物理特性调整开合控制系统,控制仿真植物模型的枝叶进行符合环境特征的摆动及颜色变化,同时对仿真植物模型各控制节点的位置特征进行分析,提高仿真植物模型对于环境特征变化的互动性和响应性,增强用户的视觉体验。
26、(2)本发明通过对仿真植物模型特征进行量化评估,采集仿真植物模型的外形数据,可以预先建立仿真植物模型依据外界环境进行开合控制的数据模型,依据仿真植物模型的物理特性调整开合控制系统,模拟枝叶在外界环境中的摆动模式,提高仿真植物模型的真实性。
27、(3)本发明通过对环境特征进行量化评估,通过采集相关环境数据,对环境特征进行量化,控制仿真植物模型的枝叶进行符合环境特征的摆动及颜色变化,优化仿真植物模型的动态行为,使仿真植物模型在不同环境下都能保持良好的仿真效果。
28、(4)本发明通过对仿真植物模型各控制节点的位置特征进行量化评估,以树干中心轴为基准线,以水平地面为参照平面,对各控制节点进行定位,实现对仿真植物模型的每个部分进行精确控制,提高仿真植物模型对于环境特征变化的互动性和响应性,增强用户的视觉体验。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198358.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表