一种无人机三维空间分布式编队方法及系统
- 国知局
- 2024-07-31 23:44:02
本发明属于无人机控制领域,具体涉及一种无人机三维空间分布式编队方法及系统。
背景技术:
1、无人机的编队方法主要包括:领航跟随法、虚拟结构法、基于行为法、人工势场法、基于一致性的算法等。其中,基于一致性的算法需要定义相应的通信拓扑结构,每架无人机在算法设计时往往需要对应某一个编队中特定的位置。无人机编队中的每架无人机往往拥有相同的配置,即被视作具有相同作用的个体。所以在编队过程中并不需要指定某一架无人机去对应某一个位置,而是期望无人机能够自主地聚集,互相配合形成需要的编队。而在大部分基于一致性的算法中,如果部分无人机出现故障,通常会应用基础算法以外的控制算法来补充编队中形成的空缺,这也大大增加了算法的复杂度。
技术实现思路
1、旨在至少解决现有技术中存在的技术问题之一,本发明提供一种无人机三维空间分布式编队方法及系统,使得无人机集群能够自主地聚集,互相配合形成需要的编队。
2、本发明的第一方面的实施例,一种无人机三维空间分布式编队方法,包括以下步骤:
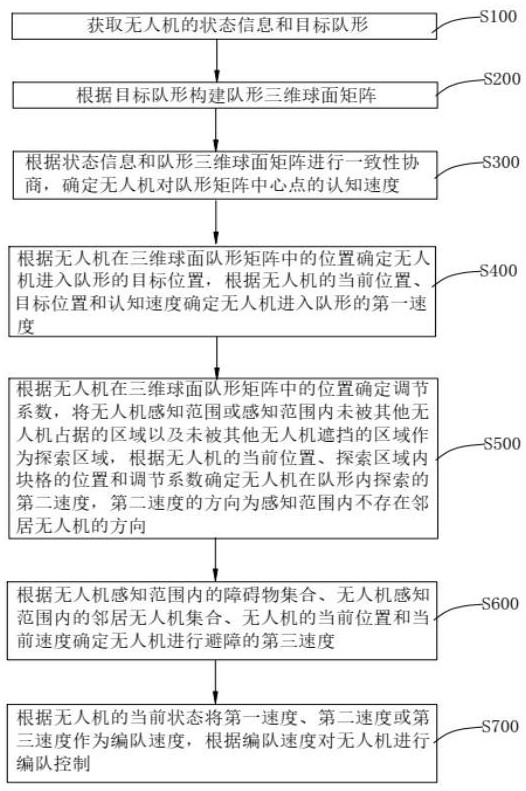
3、获取无人机的状态信息和目标队形;
4、根据目标队形构建队形三维球面矩阵;
5、根据所述状态信息和所述队形三维球面矩阵进行一致性协商,确定无人机对队形矩阵中心点的认知速度;
6、根据无人机在所述三维球面队形矩阵中的位置确定无人机进入队形的目标位置,根据无人机的当前位置、目标位置和所述认知速度确定无人机进入队形的第一速度;
7、根据无人机在所述三维球面队形矩阵中的位置确定调节系数,将无人机感知范围或感知范围内未被其他无人机占据的区域以及未被其他无人机遮挡的区域作为探索区域,根据无人机的当前位置、所述探索区域内块格的位置和所述调节系数确定无人机在队形内探索的第二速度,所述第二速度的方向为感知范围内不存在邻居无人机的方向;
8、根据无人机感知范围内的障碍物集合、无人机感知范围内的邻居无人机集合、无人机的当前位置和当前速度确定无人机进行避障的第三速度;
9、根据无人机的当前状态将所述第一速度、所述第二速度或所述第三速度作为编队速度,根据所述编队速度对无人机进行编队控制。
10、根据本发明的第一方面的某些实施例,所述根据目标队形构建队形三维球面矩阵,包括:
11、根据所述目标队形构建数字矩阵;
12、将数字矩阵中对应无人机的元素作为黑色块格,并将黑色块格的坐标与队形三维球面矩阵的索引建立对应关系,得到初始三维球面矩阵;
13、利用掩膜对所述初始三维球面矩阵进行灰度化扩展,将靠近所述黑色块格的块格转换为灰色块格和将远离所述黑色块格的块格转换为白色块格,得到灰度化三维球面矩阵;
14、将所述灰度化三维球面矩阵的块格正方体化,得到队形三维球面矩阵。
15、根据本发明的第一方面的某些实施例,所述无人机对队形矩阵中心点的认知速度表示为:
16、;
17、其中,为第i个无人机对队形矩阵中心点的认知速度,为第j个无人机对队形矩阵中心点的认知速度,为第i个无人机对队形矩阵中心点的认知位置,为第j个无人机对队形矩阵中心点的认知位置,为第i架无人机感知范围内的邻居无人机的集合,sign表示sign运算,为可调系数,为可调系数。
18、根据本发明的第一方面的某些实施例,所述根据无人机在所述三维球面队形矩阵中的位置确定无人机进入队形的目标位置,根据无人机的当前位置、目标位置和所述认知速度确定无人机进入队形的第一速度,包括:
19、当无人机处于白色块格组成的区域,将与所述无人机距离最近的灰色块格的位置作为无人机进入队形的目标位置;
20、确定无人机的当前位置至所述目标位置的速度矢量,将所述速度矢量与预设比例系数的乘积确定为无人机进入队形的第一速度。
21、根据本发明的第一方面的某些实施例,所述根据无人机在所述三维球面队形矩阵中的位置确定无人机进入队形的目标位置,根据无人机的当前位置、目标位置和所述认知速度确定无人机进入队形的第一速度,包括:
22、当无人机处于灰色块格组成的区域,在无人机的当前位置对应的掩膜中确定目标灰色块格,将所述目标灰色块格的位置作为无人机进入队形的目标位置,所述目标灰色块格的灰度值比无人机的当前位置对应的灰色块格的灰度值高;
23、按照第一速度计算公式根据无人机的当前位置、目标位置和所述认知速度确定无人机进入队形的第一速度;
24、所述第一速度计算公式为:;
25、其中,为无人机进入队形的第一速度,为控制增益系数,为目标位置,为第i个无人机的当前位置,为第i个无人机对队形矩阵中心点的认知速度。
26、根据本发明的第一方面的某些实施例,所述第二速度表示为:
27、;
28、其中,为第i个无人机的第二速度,为第i个无人机的探索区域,为块格的位置,为第i个无人机的当前位置,为无人机感知范围的半径,为可调系数;权重函数定义为:;
29、系数函数定义为:;为以块格为中心且以为半径的范围内的其他无人机,n为以块格为中心且以为半径的范围内的其他无人机的数量,为无人机的当前位置。
30、根据本发明的第一方面的某些实施例,所述无人机进行避障的第三速度表示为:
31、;
32、其中,为第i架无人机感知范围内的邻居无人机集合,为第i架无人机感知范围内的障碍物集合,为第i架无人机的当前位置,为第j架无人机的当前位置,为第i架无人机的当前速度,为第j架无人机的当前速度,为可调参数;系数由以下式子决定:,为无人机避障范围的半径。
33、根据本发明的第一方面的某些实施例,所述根据所述编队速度对无人机进行编队控制,包括:
34、对所述编队速度进行限幅处理,得到限幅速度;
35、将所述限幅速度与所述无人机的当前速度按照预设比例结合,得到执行速度;
36、根据所述执行速度对无人机进行编队控制;
37、当达到预设编队指标,完成编队;当未达到预设编队指标,重新确定第一速度、第二速度或第三速度。
38、本发明的第二方面的实施例,一种计算机可读存储介质,储存有程序指令,所述程序指令被处理器执行时实施如上所述的无人机三维空间分布式编队方法。
39、本发明的第三方面的实施例,一种无人机三维空间分布式编队系统,包括:
40、计算机装置,所述计算机装置包括如上所述的计算机可读存储介质。
41、本发明的有益效果包括:使得无人机集群能够自主地聚集,互相配合形成需要的编队。借助设计队形矩阵的思路,可以在不规定无人机对应的位置点,而是规定需要占据的区域的情况下,对不同数量的无人机集群进行相同形状的编队,能及时地对无人机集群中因无人机故障等原因导致的队形空缺进行补齐。优化无人机探索编队区域指令,提升了编队效率;使编队结果更加贴合编队队形,大大提高了无人机编队的稳定性和可扩展性。
42、此外,本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198341.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。