基于控制力矩陀螺的摩托车过弯最佳倾角控制方法及系统
- 国知局
- 2024-07-31 23:44:01
本发明属于两轮车辆智能控制领域,具体为一种基于控制力矩陀螺的摩托车过弯最佳倾角控制方法及系统
背景技术:
1、随着科技的进步,摩托车安全驾驶技术也在不断发展,特别是在过弯驾驶这一关键操作中。过弯时摩托车的稳定性和安全性尤为重要,正确的倾角可以大大减少事故的发生率。传统的摩托车过弯技术主要依靠驾驶员的经验和直觉来调整倾角,这对于需要较高驾驶技术的新手或是在极限条件下驾驶尤其困难。因此,研究如何通过科技手段实现过弯倾角的最佳控制,成为了摩托车安全驾驶技术研究的热点之一。最近,基于控制力矩陀螺(control moment gyroscope,cmg)的技术被提出来解决这一问题。这种技术可以动态调整摩托车的倾角,以适应不同的过弯速度和弯道半径,从而保持摩托车的稳定性。然而,现有的基于cmg的倾角控制方法还未能完全满足实际驾驶中对安全性和稳定性的高要求,特别是在复杂环境条件下的适应性和响应速度方面还有待提高。这促使了对摩托车过弯最佳倾角控制方法的进一步研究和开发,旨在实现更高水平的驾驶安全和性能优化。
技术实现思路
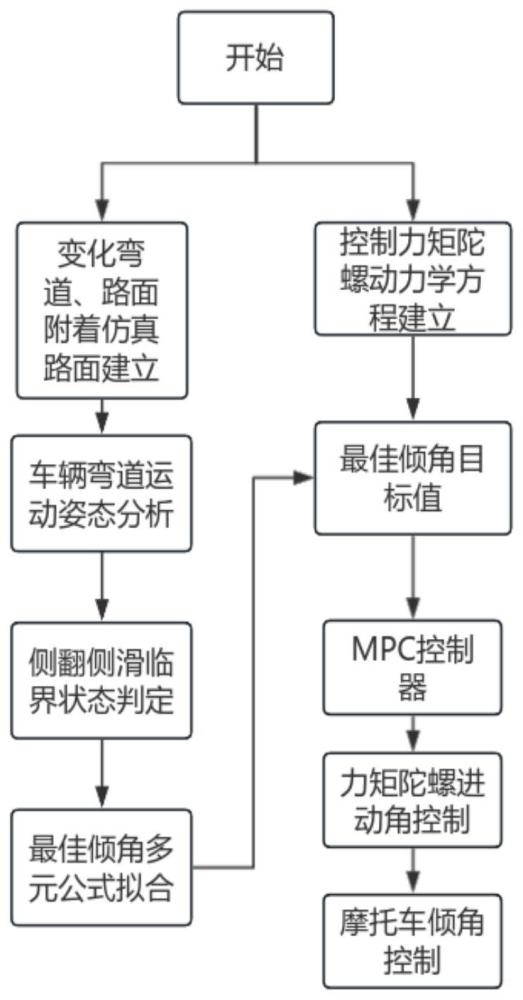
1、本发明提出了一种基于控制力矩陀螺的摩托车过弯最佳倾角控制方法及系统,该方法针对不同弯道半径、路面附着系数交互组合的仿真路面进行设计,以不同附着系数路面行驶时的车速和弯道半径为自变量,以摩托车倾角为因变量,建立拟合关系式,再根据摩托车的弯道运动姿态进行受力分析获取介于侧倾和侧滑之间的安全倾角区域,从而计算出不同车速和弯道半径下的最佳过弯倾角。建立控制力矩陀螺的动力学方程,以最佳过弯倾角为目标值,利用mpc控制器对控制力矩陀螺进行控制。
2、具体方案如下:
3、一种基于控制力矩陀螺的摩托车过弯最佳倾角控制方法,包括如下步骤:
4、步骤1:针对不同弯道半径、路面附着系数交互组合的仿真路面进行设计通过使用弯道信息传感器和路面附着系数传感器收集实际数据,验证和优化仿真模型的准确性;
5、步骤2:以不同路面附着系数和弯道半径(通过弯道信息传感器获取)为自变量,以摩托车倾角(通过倾角传感器测量)为因变量,建立临界车速的拟合关系式;
6、步骤3:基于摩托车的弯道运动姿态进行受力分析获取介于侧倾和侧滑之间的安全倾角区域,加速度传感器和陀螺仪传感器的数据用于详细分析摩托车的动态行为和运动状态;
7、步骤4:根据拟合关系式得出不同临界车速,不同附着系数和弯道半径下的最佳过弯倾角;
8、步骤5:建立控制力矩陀螺的动力学方程;
9、步骤6:以最佳过弯倾角为目标值,利用mpc控制器对控制力矩陀螺进行控制。所有传感器数据被综合利用,确保实时调整摩托车倾角以达到最佳过弯性能。
10、进一步,步骤1中针对不同弯道半径、路面附着系数交互组合的仿真路面进行设计的方法为:
11、首先,使用bikesim软件对摩托车辆动力学模型进行建立。完成动力学模型建立后,结合摩托车辆在实际使用场景中的情况,采用弯道半径为30~200米不等的8条路面,并且路面附着系数参考现实生活中常见的几种路面进行细化选取,如下表1所示:
12、表1
13、 路面类别 附着系数范围 附着系数选取值 冰雪路面 0.1~0.25 0.18 湿滑泥土路面 0.2~0.4 0.35 干燥泥土路面 0.4~0.55 0.45 湿滑沥青路面 0.5~0.6 0.55 干燥碎石路面 0.6~0.7 0.65 干燥沥青路面 0.7~0.8 0.75 干燥混凝土路面 0.8~1.0 0.9
14、根据表1中所选取的路面附着数值与几种不同的弯道半径相互组合后在bikesim软件中生成若干组不同组合的仿真路面模型。
15、进一步,步骤2根据不同附着系数路面行驶时的车速,以路面附着系数和弯道半径为自变量,以摩托车倾角为因变量,建立摩托车侧翻临界车速的拟合关系式的方法为:
16、根据上一步骤中所建立的仿真道路模型,使用simulink与bikesim软件多次联合仿真之后可以得到如下表2所示的摩托车倾角θ数据:
17、表2
18、
19、
20、根据上述得到的(xi,yj)(i=1,…,7;j=1,2,…,8),使用matlab软件运用插值法对以上数据进行三维曲面拟合,得到以弯道半径和路面附着系数为自变量道的摩托车辆侧翻临界车速阈值下对应的倾角的多项式函数:
21、θ=a0+a1r+a2r2+a3r3+b1μ+b2μ2+b3μ3
22、其中a0,a1,a2,a3,b1,b2,b3为拟合系数;r为弯道半径;μ为路面附着系数。
23、进一步,步骤3中基于摩托车的弯道运动姿态进行受力分析获取介于侧倾和侧滑之间的安全倾角区域的方法为:
24、主要通过三力交汇的原理对摩托车身进行受力分析,首先由于做圆周运动的物体除外力之外还会受到“离心力”,即惯性力的影响,根据力的三角形原理可得:
25、
26、其中
27、
28、因此可以得到
29、
30、若静摩擦力已经达到最大值fmax,则有
31、
32、又因为
33、fmax=μfn=μ(m1+m2)g
34、因此可得
35、
36、
37、tanθmax=μ
38、最终可以得到
39、θmax=arctanμ
40、其中θ为摩托车辆的倾斜角度;f为轮胎所受到的摩擦力;fn为摩托车辆所受到的地面支撑力;m1为驾驶员的质量;m2为摩托车辆的质量;v为车辆行驶车速;r为弯道半径;μ为路面附着系数;fmax为摩擦力最大值;vmax为车速最大值;θmax为倾角最大值。
41、进一步,步骤4中根据步骤2的拟合关系式得出不同路面附着系数和弯道半径下的最佳过弯倾角的方法为:
42、首先,通过传感器获得当前行驶道路的弯道信息以及所采集到的路面附着系数,将收集到的信息输入到步骤2所拟合的多项式当中,然后对所得到的安全倾角进行验证:
43、
44、其中ssres表示残差平方和,即倾角的实际观测值与拟合得到的模型预测值之差的平方和;sstot表示总平方和,即倾角的实际观测值与其平均值之差的平方和。
45、更具体地
46、
47、
48、其中,yi是第i个实际观测值;是第i个预测值;是所有观测值的平均值;n是观测值的总数。r2的值范围从0到1,其中0表示模型预测效果较差,1表示模型完美预测了所有观测值。因此,r2越接近于1,表示模型的解释能力越强,拟合效果越好;若得到的r2结果拟合效果较差则需重新检查上述仿真数据是否准确,并重新拟合。
49、进一步,步骤5中建立控制力矩陀螺的动力学方程方法为:
50、关于控制力矩陀螺(cmg)是一种常用于姿态控制的装置,主要由中心一个或多个旋转状态的陀螺和陀螺外部的框架所组成。本专利中所使用到的控制力矩陀螺结构由单独一个框架和旋转陀螺所组成。装置于摩托车辆中心处上方位置。装置中的旋转陀螺处于不断旋转状态,通过对装置中的框架部分进行控制改变陀螺角动量的方向,起到抵抗车身重力及其他外力来达到倾角控制的功能,并且在相同控制力矩陀螺结构中,此结构所带来的能耗是最小的。
51、内部陀螺在旋转的过程中会产生角速度,同时在外部框架的控制作用下使得陀螺与框架的连接轴发生旋转,旋转状态的陀螺跟随连接轴旋转产生科氏加速度,从而可以计算得到科式力矩,陀螺收到外界科式力矩的作用同时会对外界产生大小相等,方向相反的反作用力矩,称之为进动力矩,在进动力矩的作用下使得摩托车的倾角能够加以控制。
52、使用拉格朗日方程对摩托车系统的状态方程进行建立:
53、
54、l=t-v
55、其中l为拉格朗日函数;t为摩托车系统的动能;v为摩托车系统的势能,并且动能和势能是由车体、框架、陀螺主导的运动,qi(i=1,2,3)为第i个广义坐标,qi(i=1,2,3)为各广义坐标对应的广义力。
56、摩托车身、框架、陀螺的线速度分别为:
57、
58、
59、
60、式中hb、hf、hg分别为摩托车身,控制力矩陀螺框架以及控制力矩陀螺的质心高度。
61、摩托车身、框架、陀螺的动能表达式分别为:
62、
63、
64、
65、因此可以得到摩托车系统的总动能为:
66、t=tb+tf+tg
67、摩托车系统的总势能为:
68、v=(mbhb+2mfhf+2mghg)gcosθ
69、关于θ和α的拉格朗日方程如下:
70、
71、
72、联立以上式子可以得到摩托车的倾斜角加速度和陀螺的进动角加速度为:
73、
74、
75、式中,mb、mf、mg分别为车体、框架和陀螺的质量;ib为车体转动惯量;igx、igy、igz为陀螺三个方向的转动惯量;ifx、ify、ifz为框架三个方向的转动惯量;g为重力加速度;ω为陀螺的自转角速度。
76、根据上述式子可知摩托车系统具有非线性耦合项,因此对于设计非线性控制器来对车身进行倾角控制十分困难,因此以车身平衡位置为基准,可将其处理为线性化模型:
77、
78、令摩托车系统的状态变量控制量为输出量为y=[y1 y2]t=[θα]t,因此状态空间表达式为:
79、
80、
81、其中:a、b、c为中间的系数矩阵,a=ib+mbhb2+2mfhf2+2mghg2+2(ifx+igx),b=(mbhb+2mfhf+2mghg)g,c=2ifzω。a、b、c为矩阵中的系数。
82、进一步,步骤6中以最佳过弯倾角为目标值,利用mpc控制器对控制力矩陀螺进行控制的具体方法为:
83、使用零阶保持器对步骤5中所建立的系统进行离散化处理,得到离散时间的状态方程和输出方程:
84、x(k+1)=acx(k)+bcu(k)
85、y(k)=ccx(k)
86、在上述的状态空间方程中,x(k)、u(k)、y(k)分别表示k时刻离散化的状态变量、控制量、输出量,cc=ct,其中ts为系统的采样周期;a、c为步骤5中的系数矩阵。
87、以k时刻的状态量x(k)作为预测系统下一个状态的起始时刻,可以得到系统的预测方程:
88、
89、其中
90、
91、其中,带有为预测值;k表示当前所在步数;p表示预测时域;m表示控制时域y和γ的定义为:
92、
93、在mpc算法中,预测控制器的性能指标需要最小化,因此将目标函数表示为:
94、
95、其中qi为第i时刻控制所输出的加权矩阵;ri为第i时刻控制所输入的加权矩阵;yref(k)为所给定的参考输入值。经过简化计算,可将目标函数简化为:
96、
97、其中
98、
99、式中ε(k)为系统误差,具体表示为:
100、
101、对输入变量的范围进行约束,使得系统的控制量和控制增量能够满足时域约束条件:
102、umin(k+i)≤u(k+i)≤umax(k+i),i=0,1,…,m-1;
103、△umin(k+i)≤△u(k+i)≤△umax(k+i),i=0,1,…,m-1;
104、式中,下标min和max分别表示最小值和最大值,u(k+i)表示k+i时刻的控制量,
105、△u(k+i)表示k+i时刻的控制增量。
106、由于上述约束条件的添加,使得优化问题的最优解无法通过计算获得,因此需要采用到数值求解的方法,将优化问题转化为qp函数,使得目标函数转化为:
107、zthz-gtz
108、其中,z=u(k)为目标函数的一个独立变量,h是hessian矩阵,g是梯度向量将所得到的预测方程带入到目标函数当中,可以得到:
109、
110、其中
111、
112、g(k+1|k)=2γtqitqiε(k)
113、控制的约束需要转换为cx≥b的形式:
114、
115、
116、其中
117、
118、
119、式中i为主对角线元素都为1的单位矩阵。
120、综合上述式子,可以得到带有约束的mpc问题最终表达式为:
121、
122、其中
123、
124、
125、将摩托车车身参数输入到设计的mpc控制策略系统的状态空间方程当中,将预测时域与控制时域数值进行调试后进行仿真,完成对摩托车车身倾角的控制。
126、本发明所使用的传感器如下:
127、1.弯道信息传感器:包含gps模块,安装在摩托车的前部,例如仪表盘附近,以确保有足够的天线覆盖范围来接收卫星信号。
128、2.路面附着系数传感器:这种传感器需要与路面接触,或者能够从接近路面的位置检测路面状况,因此安装在摩托车的底部前端,靠近前轮。
129、3.速度传感器:速度传感器经常与摩托车的传动系统相关联,安装在摩托车的后轮轴附近或变速箱出口,以测量轮速或输出轴的转速。
130、4.倾角传感器:倾角传感器(或倾斜传感器)用于测量摩托车相对于垂直方向的倾斜角度,因此安装在摩托车的中心重心位置,为车架的中央区域。
131、5.陀螺仪传感器:陀螺仪传感器用于测量角速度,对于控制系统的反应速度和精度非常关键,安装在摩托车的稳定部分,比如车架中央,靠近重心的位置。
132、6.加速度传感器:加速度传感器测量摩托车在不同方向上的加速度,同样安装在摩托车的中心重心位置,以确保测量结果的准确性。
133、本发明的有益效果:
134、(1)根据不同附着系数路面行驶时的车速和弯道半径对摩托车的最佳过弯倾角建立拟合关系式;
135、(2)根据不同弯道半径和路面附着系数得出最佳过弯倾角,可以满足不同弯道行驶的要求;
136、(3)采用mpc控制器,通过控制力矩陀螺来实现最佳过弯倾角的控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198339.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表