基于延时脉冲整形的S曲线规划系统及其参数整定方法
- 国知局
- 2024-07-31 23:44:16
本发明属于精密运动平台,涉及一种精密运动平台运动轨迹规划系统及其参数整定方法,具体涉及一种精密运动平台点位运动的柔性结构残余振动抑制系统及其参数整定方法。
背景技术:
1、新一代的精密制造设备对产量和品质都提出了更高的要求,需要在高动态下同时保证精度和调整时间。而多数运动工况下,运动轨迹会对系统造成冲击引起残余振动,而系统需要等待残余振动幅值小于一定阈值才能继续推进,这严重制约了设备的产率和产品的良率。为了减少因柔性系统被激发造成的残余振动,目前常用的s曲线设计时主要分为两个方向:考虑物理条件制约的情况下,增强自身的光顺性设计运动轨迹;或是假设轻阻尼系统中小阻尼影响可以忽略不计而设计运动轨迹。但这些轨迹设计方法没有完全考虑被控系统的动力学特性,很难保证残余振动抑制效果和时间消耗的兼容性。
技术实现思路
1、为了解决背景技术中存在的上述问题,本发明提供了一种基于延时脉冲整形的s曲线规划系统及其参数整定方法。
2、本发明的目的是通过以下技术方案实现的:
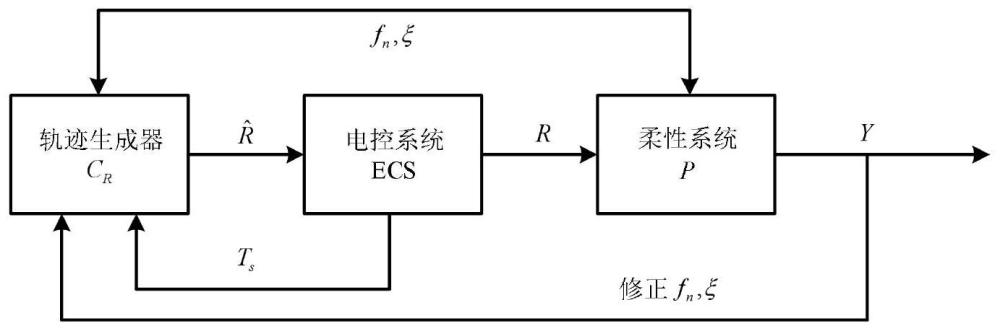
3、一种基于延时脉冲整形的s曲线规划系统,由轨迹生成器cr、电控系统ecs、柔性系统p和实际输出y组成,其中:
4、所述轨迹生成器cr的输出为连续参考s曲线连续参考s曲线包含位置r、速度v、加速度a、加加速度j、加加速时长tj、恒加速时长ta、减加速时长td、恒速时长tv、加速时间调节参数α、加速度非对称调节参数β、整形器延时tz1和tz2、幅值参数a1、a2和a3以及电控系统ecs的离散采样时间ts;
5、所述连续参考s曲线经电控系统ecs获得参考输入r,参考输入r经柔性系统p获得实际系统输出y,且电控系统ecs的离散采样时间ts、柔性系统p的共振频率fn、阻尼系数ξ以及实际系统输出y的残余振动的信息共同提供给轨迹生成器cr,以修正连续参考s曲线
6、一种上述基于延时脉冲整形的s曲线规划系统的参数整定方法,包括以下步骤:
7、步骤s1:建立基于延时脉冲整形的非对称s曲线;
8、步骤s2:根据柔性系统p的共振频率fn以及阻尼系数ξ获得柔性系统p的极点;根据s1建立的非对称s曲线所规划的运动轨迹获得轨迹的零点,并基于零点配置原理,建立零残余振动约束下的复频域方程组;根据s1建立的非对称s曲线延时脉冲整形方式,基于电控系统ecs的采样时间ts,建立零残余振动约束下的整形器延时、幅值方程;
9、步骤s3:利用数值方法求残余振动为零时的加速时间调节参数α以及加速度非对称调节参数β的数值解。
10、相比于现有技术,本发明具有如下优点:
11、本发明解决了传统s曲线最高阶延时脉冲叠加规划时未考虑被控系统柔性模态信息,容易激励柔性结构振动模态造成残余振动甚至物理损伤的问题,同时解决了传统柔性结构残余振动抑制需添加额外的减震装置,重量增加和经济成本较高的问题。
技术特征:1.一种基于延时脉冲整形的s曲线规划系统,其特征在于所述系统由轨迹生成器cr、电控系统ecs、柔性系统p和实际输出y组成,其中:
2.一种权利要求1所述基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述方法包括以下步骤:
3.根据权利要求2所述的基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述步骤s1的具体步骤如下:
4.根据权利要求3所述的基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述速度在匀速段和位置在定位段的拉普拉斯域表达式分别表示为:
5.根据权利要求2所述的基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述步骤s2的具体步骤如下:
6.根据权利要求5所述的基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述步骤s203中,特殊情况下为了时间最优,需满足:
7.根据权利要求2所述的基于延时脉冲整形的s曲线规划系统的参数整定方法,其特征在于所述步骤s3的具体步骤如下:
技术总结本发明公开了一种基于延时脉冲整形的S曲线规划系统及其参数整定方法,所述系统由轨迹生成器、电控系统ECS、柔性系统和实际输出组成,其中:轨迹生成器的输出为连续参考S曲线,连续参考S曲线经电控系统ECS获得参考输入,参考输入经柔性系统获得实际系统输出,且电控系统ECS的离散采样时间、柔性系统的共振频率、阻尼系数以及实际系统输出的残余振动的信息共同提供给轨迹生成器,以修正连续参考S曲线。本发明解决了传统S曲线最高阶延时脉冲叠加规划时未考虑被控系统柔性模态信息,容易激励柔性结构振动模态造成残余振动甚至物理损伤的问题,同时解决了传统柔性结构残余振动抑制需添加额外的减震装置,重量增加和经济成本较高的问题。技术研发人员:李理,董岳,宋硕,刘杨,谭久彬受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198363.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表