在风浪流环境下的无人船节能路径规划方法
- 国知局
- 2024-07-31 23:44:15
本发明涉及无人船路径规划领域,更具体地说,涉及一种在风浪流环境下的无人船节能路径规划方法。
背景技术:
1、现有无人船路径规划方法大都关注无人船避障和路径规划算法本身,而不考虑有风浪的环境下对无人船的影响,风浪不仅会对无人船造成额外的能耗影响,在风浪过大时无人船还会出现倾斜等危险。1986年khatib首先提出人工势场法,并将其应用在机器人避障领域,人工势场法的基本思想是在障碍物周围构建障碍物斥力势场,在目标点周围构建引力势场,类似于物理学中的电磁场。被控对象在这两种势场组成的复合场中受到斥力作用和引力作用,斥力和引力的合力指引着被控对象的运动,搜索无碰的避障路径。遗传算法是一类借鉴生物界的进化规律(适者生存,优胜劣汰遗传机制)演化而来的随机化搜索方法。1975年由j.holland首先提出,具有内在的隐并行性和更好的全局寻优能力;采用概率化的寻优方法,能自动获取和指导优化的搜索空间,自适应地调整搜索方向,不需要确定的规则。
2、目前现有的无人船路径存在的问题:(1)无人船在风浪环境下受风浪阻力影响的能耗问题,(2)无人船因避风浪造成路径弯曲的能耗问题,(3)无人船在环境风浪过大时姿态过于倾斜可能出现的安全问题。
技术实现思路
1、本发明要解决的技术问题在于,提供一种在风浪流环境下的无人船节能路径规划方法,其能够使得无人船在实现目标的到达和避障的同时,既能减少风浪的能耗又不至于因避风浪导致路径过长,同时在有倾覆危险时顺风浪撤离。
2、本发明解决其技术问题所采用的技术方案是:构造一种在风浪流环境下的无人船节能路径规划方法,包括以下步骤:
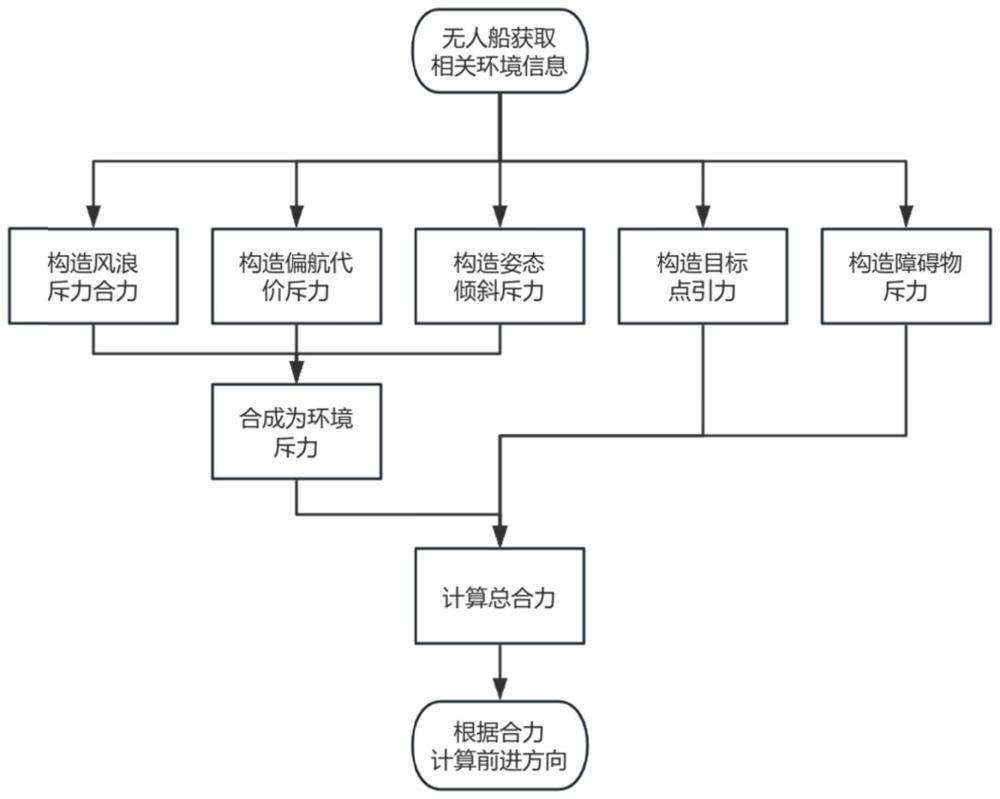
3、s1、无人船通过传感器获取环境的风流速度和水流速度以及自身姿态倾斜角,通过雷达探测障碍物和目标位置;
4、s2、将风流速度和水流对无人船的能耗影响抽象为人工势场法中的风浪斥力合力;
5、s3、将无人船避风浪造成的路径弯曲代价抽象为人工势场法中的偏航代价斥力;
6、s4、将无人船受风浪影响下出现姿态倾斜的能耗影响和安全威胁抽象为人工势场法中的姿态倾斜斥力;
7、s5、将步骤s2、s3、s4中的风浪斥力合力、偏航代价斥力、姿态倾斜斥力矢量合成并抽象为人工势场法中的环境斥力;
8、s6、使无人船受基于人工势场法构造的目标引力、障碍物斥力和环境斥力的合力影响,通过合力引导无人船航行。
9、按上述方案,所述步骤s1中,将风浪流对无人船的能耗影响抽象为对无人船虚拟的风浪排斥作用,具体为:
10、将风流速度v1与水流速度v2通过不同的增益系数ε1、ε2正向增益再进行合成:
11、fflow=ε1v1+ε2v2;
12、式中:fflow为风浪排斥作用,ε1为风流增益系数,ε2为水流增益系数,v1为风矢量,v2为流矢量。
13、按上述方案,所述步骤s3中,偏航代价斥力为:实时获取无人船因受构造的风浪斥力合力影响下的偏航角弧度α,并通过不同的增益系数ε3将其负向增益:
14、
15、式中:uyaw为偏航代价阻力势场,fyaw为偏航代价阻力,其方向指向风浪斥力合力的反方向;ε3为偏航增益系数,α为偏航角弧度。
16、按上述方案,所述步骤s4中,姿态倾斜斥力为:无人船最大姿态倾斜角β施加于指数上,并通过不同的增益系数ε4进行正向增益。
17、
18、式中:uinclin为偏航代价阻力势场,fincln为姿态倾斜斥力,其方向指向风浪斥力合力的方向;ε4为倾斜增益系数,β为无人船最大姿态倾斜角。
19、按上述方案,所述步骤s5中,环境斥力的计算式为:
20、fenv=fflow+fyaw+fincln;
21、式中:fenv为环境斥力。
22、按上述方案,所述步骤s5中,所述无人船受力路径规划,使无人船受到基于人工势场法构造的合力:
23、
24、式中:f(q)为无人船所受合力,fatt(q)为目标点引力,为m个障碍物的斥力。
25、实施本发明的在风浪流环境下的无人船节能路径规划方法,具有以下有益效果:
26、本发明提出的一种在风浪流环境下的无人船节能路径规划方法,使得无人船在风浪环境下航行主动避免顶风流的阻力能耗,而又不至于因避风浪造成路径过长;无人船在风浪过大时由构造的姿态倾斜斥力完全主导无人船受力全速顺风浪避离现场,提高了在极端天气航行的安全性。
技术特征:1.一种在风浪流环境下的无人船节能路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的在风浪流环境下的无人船节能路径规划方法,其特征在于,所述步骤s1中,将风浪流对无人船的能耗影响抽象为对无人船虚拟的风浪排斥作用,具体为:
3.根据权利要求1所述的在风浪流环境下的无人船节能路径规划方法,其特征在于,所述步骤s3中,偏航代价斥力为:实时获取无人船因受构造的风浪斥力合力影响下的偏航角弧度β,并通过不同的增益系数ε3将其负向增益:
4.根据权利要求1所述的在风浪流环境下的无人船节能路径规划方法,其特征在于,所述步骤s4中,姿态倾斜斥力为:无人船最大姿态倾斜角β施加于指数上,并通过不同的增益系数ε4进行正向增益。
5.根据权利要求1所述的在风浪流环境下的无人船节能路径规划方法,其特征在于,所述步骤s5中,环境斥力的计算式为:
6.根据权利要求1所述的在风浪流环境下的无人船节能路径规划方法,其特征在于,所述步骤s5中,所述无人船受力路径规划,使无人船受到基于人工势场法构造的合力:
技术总结本发明涉及一种在风浪流环境下的无人船节能路径规划方法,包括以下步骤:S1、无人船通过传感器获取环境的风流速度和水流速度以及自身姿态倾斜角;S2、将风流速度和水流对无人船的能耗影响抽象为人工势场法中的风浪斥力合力;S3、将无人船避风浪造成的路径弯曲代价抽象为人工势场法中的偏航代价斥力;S4、将无人船受风浪影响下出现姿态倾斜的能耗影响和安全威胁抽象为人工势场法中的姿态倾斜斥力;S5、抽象为人工势场法中的环境斥力;S6、通过合力引导无人船航行。本发明通过运用遗传算法进行具体增益系数的计算达到最优解,使得无人船既能减少风浪的能耗又不至于因避风浪导致路径过长,同时在有倾覆危险时全速顺风浪撤离。技术研发人员:张进峰,张善荣,邢欧文,许泽耀,陈曲舒,吴长一,王海强,曹丰智受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198361.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表