一种基于执行器动力学特性的航天器姿态跟踪控制方法
- 国知局
- 2024-07-31 23:44:20
本发明涉及航天器,更具体的说是涉及一种基于执行器动力学特性的航天器姿态跟踪控制方法。
背景技术:
1、姿态控制技术是实现多种航天任务的基础,因此近年来受到众多研究人员的广泛关注。与此同时,由于航天器系统中不可避免的存在多种干扰因素和系统约束,例如环境干扰力矩、模型不确定性以及执行器的动力学约束等,使得所设计姿态控制方法必须具备处理多种系统不确定性的能力。
2、针对上述问题,当前现有技术中,针对存在模型不确定性和环境干扰力矩的姿态跟踪控制系统,利用自适应律对系统不确定性上界函数中的未知参数进行在线估计。存在结合滑模控制和自适应控制,通过对被控对象动力学方程中不确定项自身所含有的未知参数进行在线估计,实现了姿态跟踪控制。包括分别构造了扩张状态观测器和非线性干扰观测器,能够实现对系统的综合不确定性进行在线估计,进而实现补偿。其区别在于:扩张状态观测器能够实现无误差估计,而非线性干扰观测器的观测误差与被观测项的一阶导数的上界有关。利用神经网络对模型不确定性和干扰力矩进行在线估计,并结合反步法获得了姿态控制方法。
3、上述现有技术中并未考虑执行器的动力学约束问题。
4、由于受到物理特性及制造工艺的限制,执行器输出信号一般为一阶动力学方程的状态变量。而执行器动力学方程的引入必将导致系统阶数升高,这就要求相关控制器能够用来处理被控对象具有较高阶数的情况。现有技术中针对存在执行器动力学约束的一般高阶非线性动力学系统,基于反步法和自适应法设计了跟踪控制器。且考虑了存在执行器动力学约束的姿态跟踪系统,基于反步法实现了姿态跟踪控制。但由于上述技术方案中采用了经典的反步法,造成了增广系统的控制信号中包含了虚拟控制信号的导数项,导致所得控制器的形式变得较为复杂。还包括设计了反步自适应姿态跟踪控制器,并通过神经网络对包含虚拟控制导数在内的系统不确定性进行拟合。但由于神经网络待训练参数较多,也使得相应控制器的调整参数较多。
5、因此,如何设计一种基于执行器动力学特性的航天器姿态跟踪控制方法,解决存在执行器动力学约束条件下的姿态跟踪控制问题,并确保所得控制器具有尽可能简洁的形式是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于执行器动力学特性的航天器姿态跟踪控制方法,以滑模控制和反步控制为基本框架,通过结合非线性观测器对系统综合不确定性和虚拟信号的导数进行在线估计和补偿。
2、为了实现上述目的,本发明采用如下技术方案:
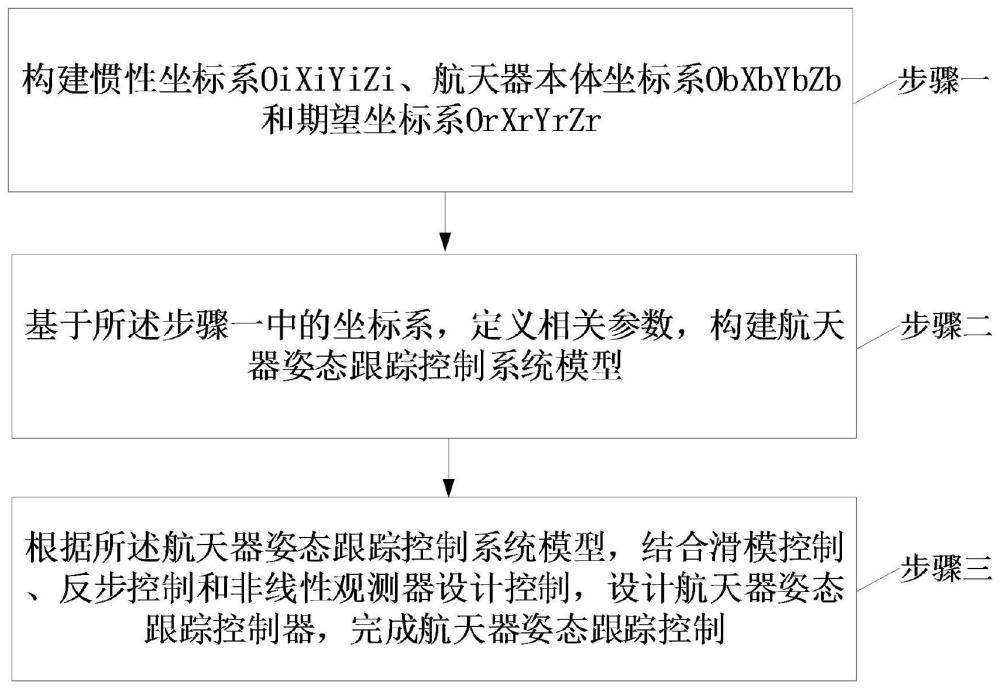
3、一种基于执行器动力学特性的航天器姿态跟踪控制方法,包括:
4、步骤一、构建惯性坐标系oixiyizi、航天器本体坐标系obxbybzb和期望坐标系orxryrzr;
5、步骤二、基于所述步骤一中的坐标系,定义相关参数,构建航天器姿态跟踪控制系统模型;
6、步骤三、根据所述航天器姿态跟踪控制系统模型,结合滑模控制、反步控制和非线性观测器设计控制,设计航天器姿态跟踪控制器,完成航天器姿态跟踪控制。
7、其中,所述步骤一,惯性坐标系oixiyizi,以地球球心为原点,oixi轴和oiyi轴在赤道平面内正交,oixi轴指向春分点,oizi轴垂直于赤道平面并指向地球的北极;
8、航天器本体坐标系obxbybzb,以航天器本体质心为原点,obxb轴、obyb轴和obzb轴固定在航天器本体上,构成右手坐标系;
9、期望坐标系orxryrzr,坐标轴的方向和排列根据具体任务进行选择。
10、进一步的,所述步骤二,定义相关参数,构建航天器姿态跟踪控制系统模型,包括:
11、定义为航天器本体坐标系与惯性坐标系的相对姿态;定义为期望坐标系与惯性坐标系的相对姿态;定义为qd的共轭;定义ω∈r3×1为航天器本体坐标系下的航天器角速度;定义i3×3为单位矩阵;定义为期望坐标系到航天器本体坐标系的坐标转换矩阵;定义ωd∈r3×1表示期望坐标系相对于惯性坐标系的角速度;
12、航天器本体坐标系相对于期望坐标系的误差四元数为:
13、航天器本体坐标系相对于期望坐标系的误差角速度为:
14、定义j=j0+δj∈r3×3为航天器的惯量矩阵,其中,j0为已知的标称惯量矩阵,δj为可导且有界的模型不确定性矩阵;定义u∈r3×1为控制力矩,定义d∈r3×1为外界干扰力矩;
15、建立描述姿态跟踪问题的数学模型为:
16、
17、
18、
19、
20、
21、δ=δf+d (6)
22、其中,uc∈r3为增广系统的控制信号;δ=[δ1 δ2 δ3]t为系统综合不确定性;a×为三维向量a=[a1,a2,a3]t∈r3×1生成的反对称矩阵,且a×=[0,-a3,a2;a3,0,-a1;-a2,a1,0];
23、定义λmax(j0)和λmin(j0)分别表示j0的最大特征值和最小特征值;表示向量x=[x1,…,xn]t∈rn的2-范数;定义sigρ(x)=[sigρ(x1),…,sigρ(xn)]t∈rn,其中,sig(xi)ρ=sgn(xi)|xi|ρ,0<ρ<1,i=1,2,…,n;
24、引入假设、引理和证明;
25、假设:δ的一阶导数有界;
26、引理:若s=03×1,则和能够渐近收敛到期望平衡点附近的微小邻域内;
27、证明:系统(1)和(2)的平衡点包括
28、对于选取lyapunov函数对其求导得恒为正;根据lyapunov稳定性理论,不稳定,系统中任意小的干扰均能导致系统状态远离
29、对于选取lyapunov函数为求导得恒为负;因此,是稳定平衡点,且有限时间之后能够实现并且,成立,进一步和成立;根据lyapunov稳定性理论,和将渐近收敛到原点附近的微小邻域内。
30、进一步的,所述根据所述航天器姿态跟踪控制系统模型,结合滑模控制、反步控制和非线性观测器设计控制设计航天器姿态跟踪控制器,包括:
31、定义滑模变量:
32、
33、其中,α1>0;
34、定义lyapunov函数:
35、
36、对v2求导得,
37、
38、控制信号u的期望值ud设计为:
39、
40、其中,为δ的观测值,并通过以下干扰观测器获得:
41、
42、
43、其中,k0>0,η∈r3×1,u∈r3×1为施加的实际控制信号;
44、定义观测误差求导得,
45、
46、定义实际控制信号u与期望控制ud的偏差为
47、z=u-ud (14)
48、对z求导得
49、
50、设计uc为
51、
52、其中,τ2>0,为虚拟控制信号ud一阶导数的观测值,并通过以下观测器产生:
53、
54、
55、
56、其中,k1>0,为ud的观测值,并且为对的在线估计;定义观测误差可得:
57、
58、定理和证明:
59、定理:在姿态跟踪控制器的作用下,航天器姿态跟踪控制系统模型是稳定的,并且和将渐近收敛到期望平衡点的邻域;
60、证明:定义lyapunov函数
61、
62、对v3求导,代入所述公式(1)、(2)、(13)、(15)、(16)、(20)得
63、
64、整理得:
65、
66、利用young不等式可得:
67、
68、
69、
70、
71、所述公式(23)整理为:
72、
73、基于所述公式(10),ud的导数表示为:
74、
75、考虑闭区域在π中存在m1>0,使得成立;定义lyapunov函数对v4求导并利用所述公式(20)得:
76、
77、其中,e2的上界为则的上界表示为:其中,j=1,2,3;
78、所述公式(28)整理为:
79、
80、其中,通过选取控制参数,使得μ0≥κ/b0和成立;则v3(t)将始终位于闭区域π中,并且s、z、e1、e2始终有界;v3(t)≤b0恒成立,s、z、e1、e2变量均有界;
81、基于以下关系式:
82、
83、其中,0≤β≤1;
84、可得:
85、
86、根据所述公式(7),滑模变量表示为整理可得,
87、若系统状态满足和将渐近趋近于原点,并且该收敛过程将持续至时结束;可得跟踪误差向量和的稳态误差上界为和
88、经由上述的技术方案可知,与现有技术相比,该技术方案设计了以滑模控制、反步控制和非线性观测器为基础的姿态跟踪控制方法,包括:
89、(1)设计姿态跟踪控制器的过程中,明确考虑了模型不确定性、外界干扰和执行器动力学约束对系统稳定性的影响;
90、(2)利用非线性干扰观测器对含有模型不确定性和环境干扰力矩的系统综合不确定性进行了估计和补偿,且不需要不确定性的先验信息;
91、(3)设计了观测器对虚拟信号的导数进行在线估计,并引入闭环控制器中进行抵消,避免了控制器中直接出现虚拟控制信号的导数项,简化了控制器的设计形式。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表