一种大规模无人机群协同编队控制方法与流程
- 国知局
- 2024-07-31 23:44:26
本发明属于无人机群智能控制,特别是指一种大规模无人机群协同编队控制控制方法,可用于对大规模无人机群智能飞行。
背景技术:
1、无人机凭借成本低、隐蔽性好和机动性强等特点在民用和军事等多个领域被广泛使用。无人机技术已经成为各国竞相研制投入热点,在现代战争中,无人机在情报、侦察、定位、引导等领域的成功应用,均展示出优于有人装备或单纯人力的特点,且有效避免了己方人员伤亡。在此背景下,无人机装备研制与发展受到广泛关注。由此可见,未来一个时期无人机装备在作战运用方面将发挥举足轻重作用。
2、与此同时,我国无人机领域也取得了快速进展,无人机装备技术已成为广受关注的新兴行业。随着无人机技术发展与应用范围进一步扩大,单架无人机性能已经无法满足大规模或者复杂环境下的执行复杂任务需求,世界各国相继通过增加执行任务的无人机数量来突破单架无人机性能瓶颈。
3、现阶段,无人机编队运用涉及多项关键性技术,包括离线与在线避障、自主控制、任务分配、编队协同和通信等。其中,无人机群协同编队控制是无人机集群应用的重要研究方向,其核心技术途径是多架无人机通过高效的自主控制策略完成实时高精度机身姿态控制,进而实现航迹追踪与编队队形保持,深入研究在复杂条件下使用多无人机协同编队已成为该领域未来发展的必然趋势。
技术实现思路
1、有鉴于此,本发明提出了一种大规模无人机群协同编队控制方法,该方法构建了分层递解式无人机群任务协同架构,可以根据具体任务对无人机群进行分组,并给出了队形保持及安全飞行策略,综合了集中式加分布式控制的优势,并降低了无人机群任务协同所需共享信息量。
2、为了实现上述目的,本发明采用的技术方案为:
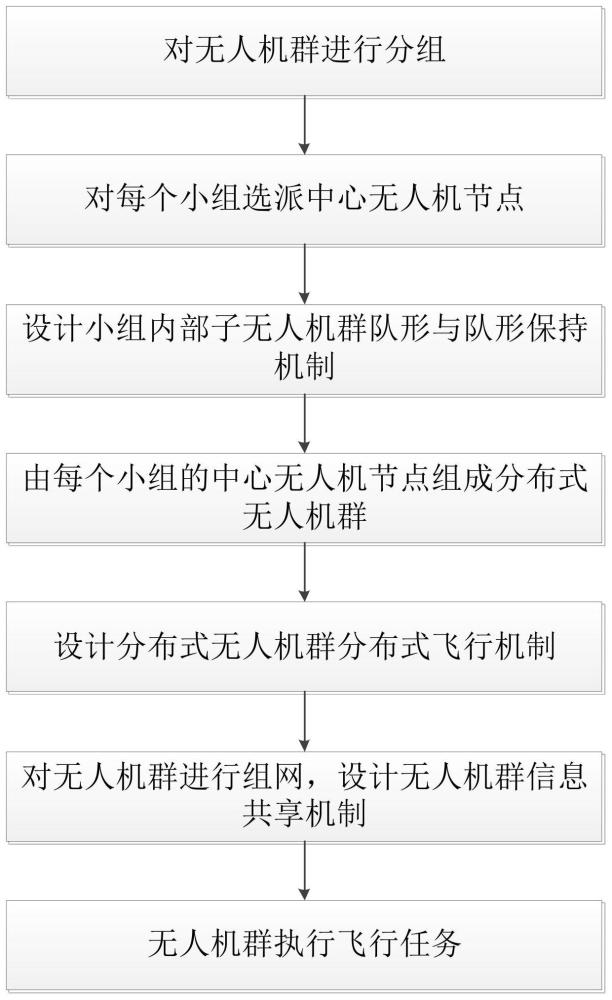
3、一种大规模无人机群协同编队控制方法,包括如下步骤:
4、步骤1,将无人机群划分为多个小组,每个小组是一个子无人机群;
5、步骤2,为每个小组推举中心无人机;
6、步骤3,设计小组内部子无人机群的队形,并设计队形保持机制;
7、步骤4,将所有小组的中心无人机组成骨干分布式无人机群;
8、步骤5,设计骨干分布式无人机群的分布式控制机制;
9、步骤6,对子无人机群进行组网,设计无人机群信息共享机制;
10、步骤7,无人机群执行飞行任务。
11、进一步地,步骤1的划分方式为以下任何一种:
12、1a)根据任务数量,对无人机群进行平均分配;
13、1b)根据无人机功能类型,将同种功能无人机分成一组,或者将不同功能无人机进行交叉组合,确保每一小组都有多种不同功能无人机;
14、1c)根据无人机载重能力,将相同载重能力无人机分成一组,或者将不同载重能力无人机进行交叉组合,确保每一小组都有多种载重能力无人机;
15、1d)根据完成不同任务所需无人机数量进行分组,使总任务收益函数f最大,其中,总任务收益函数f的计算方式为:
16、
17、其中,ntask表示需完成任务数量,nuav_i表示分配到第i类任务的无人机数量,fi,j(uavi,j)表示分配到第i类任务中的第j架无人机的任务收益函数,nuav表示可用无人机总数量,λ为超参数,用于限制使用无人机数量;
18、fi,j(uavi,j)计算方式为:对于覆盖任务,fi,j(uavi,j)为以目标重要程度为权值的覆盖目标数目的加权和;对于打击任务,fi,j(uavi,j)为以目标重要程度为权值的打击目标数目的加权和;对于侦察任务,fi,j(uavi,j)为以区域重要程度为权值的侦察区域的加权和。
19、进一步地,步骤2的具体方式为:
20、2a)计算小组内部每架无人机推举为中心无人机的收益,即中心收益,计算方式如下:
21、lck=tk+ρ×wk-μ×disk
22、其中,lck表示小组内部第k架无人机中心收益,tk表示小组内部第k架无人机剩余续航时间,wk表示小组内部第k架无人机任务能力,disk表示小组内部第k架无人机距离小组无人机群的中心距离,ρ和μ为超参,分别用于调整任务能力和中心距离在损失函数中的权重;
23、2b)对小组内部每架无人机的中心收益进行排序,选用中心收益最大的无人机作为小组内部中心无人机;
24、2c)中心无人机如出现故障,则重新计算小组内部剩余无人机的中心收益并进行排序,选用中心收益最大的无人机作为小组内部中心无人机。
25、进一步地,步骤3中,小组内部子无人机群的队形如下:
26、中心无人机位于子无人机群中心,非中心无人机均匀分布在以中心无人机为圆心的圆周上,中心无人机与非中心无人机的距离ls为:
27、ls=2×(vs×ts+su)
28、其中,vs表示子无人机群运动速度,ts表示中心无人机与非中心无人机间的信息交换时长,su表示无人机尺寸。
29、进一步地,步骤3中,队形保持机制为:
30、3a)计算队形保持损失函数:
31、
32、其中,ltc表示队形保持损失,m表示无人机群小组数目,nm表示第m个小组内部无人机数目,δlm,n表示第m个小组中第n架无人机与邻近无人机的相对位置变化量,δlm,n,o表示第m个小组中第n架无人机与其对应的小组中心无人机的相对位置变化量,δvm,n,o表示第m个小组中第n架无人机与其对应的小组中心无人机的相对速度变化量,σ为δlm,n,o的权重,τ为δvm,n,o的权重;
33、3b)中心无人机负责计算小组内部所有无人机的下一个航点,并共享给小组内各无人机,子无人机群执行协同飞行任务的过程中,保证队形保持损失最小。
34、进一步地,步骤4中,骨干分布式无人机群内部保持分布式决策机制;如果骨干分布式无人机群中某一中心无人机出现故障,则该中心无人机所在小组立即推举新中心无人机。
35、进一步地,步骤5所述的骨干分布式无人机群的分布式控制机制为:
36、5a)使用人工势场法作为骨干分布式无人机群分布式控制底层方法;具体方式为:
37、对于一个小组,将其他小组和环境中障碍物都作为障碍物,综合产生斥力场urep(q),飞行目标航点产生引力场uatt(q);
38、uatt(q)的计算方式如下:
39、
40、其中,q表示无人机当前位置,qgoal表示无人机目标位置,表示引力场阈值参数,用于在无人机距目标较远情况下,削弱目标引力场作用,ζ表示引力场增益,d(q,qgoal)表示无人机到目标位置距离;
41、引力场梯度计算方式如下:
42、
43、urep(q)计算方式如下:
44、
45、
46、其中,n表示障碍物数目,表示第i个障碍物对无人机产生的斥力场,η表示斥力增益常量,di(q)表示第i个障碍物与无人机的距离,是第i个障碍物作用阈值,在该阈值范围内障碍物才产生斥力,超出此范围不产生斥力影响;
47、斥力场梯度计算方式如下:
48、
49、
50、其中,表示di(q)的梯度;
51、在此基础上,得到人工势力场u(q)为:
52、u(q)=uatt(q)+urep(q)
53、人工势力场梯度为:
54、
55、5b)将每个小组作为一个整体,用uc表示,将uc的最小包围圆作为边缘,最小包围圆的半径表示中心无人机与非中心无人机的距离ls;
56、5c)限定不同小组之间最小间距为:
57、l(uci,ucj)=2×(2×ls+ls)
58、其中,uci与ucj分别表示第i个和第j个小组,l(uci,ucj)表示第i个和第j个小组的中心无人机之间的距离。
59、进一步地,步骤6的具体方式为:
60、6a)构建无人机群信息收发网络:
61、
62、其中,tri,j表示第i架无人机和第j架无人机的信息收发通路,tri,j=1表示第i架无人机和第j架无人机能够收发信息,tri,j=0表示第i架无人机和第j架无人机不能收发信息;
63、6b)小组内部非中心节点无人机将信息共享给中心节点无人机,中心节点无人机规划出每一架非中心节点无人机的下一步航点,然后通过组播方式发给各个非中心节点无人机。
64、进一步地,步骤7的具体方式为:
65、7a)设置每一架无人机的返航高度,计算方式如下:
66、h(uavm,n)=hm+△hn
67、|hm,i-hm,j|≥ho,i≠j
68、|△hn,i-△hn,j|≥hc,i≠j
69、其中,h(uavm,n)表示第m小组中第n架无人机的返航高度,hm表示第m小组的基础返航高度,△hn表示第n架无人机返航高度增量,|hm,i-hm,j|≥ho,i≠j表示不同小组的基础返航高度间的差值的绝对值要大于常数ho,ho表示不同小组的基础返航高度间的安全量,|△hn,i-△hn,j|≥hc,i≠j表示同一个小组中不同无人机的返航高度增量间的差值要大于常数hc,ho表示小组内部不同无人机返航高度增量间的安全量;
70、7b)无人机各自读取其工作状态,读取方式如下:
71、
72、其中,g(uavm,n)表示第m小组中第n架无人机工作状态,当无人机处于正常状态时,g(uavm,n)=1,无人机正常工作;表示第m小组中第n架无人机规划的下一个飞行航点pxm,n不位于第m小组的预设工作区域sm中,此时g(uavm,n)=2,无人机在当前位置盘旋或悬停,等待下一个航点信息;em,n<et表示第m小组中第n架无人机的电池电压em,n小于预设安全电压et,此时g(uavm,n)=3,无人机飞到其相应返航高度,执行返航任务;当无人机处于不受控状态时,g(uavm,n)=4,表示无人机失去控制,这时候需要地面站、遥控器进行应急操作,无人机采取悬停、盘旋、降落或停桨操作;当地面站和遥控器失去对故障无人机控制权限时,使用其余无人机碰撞故障无人机,使其失去运动能力,降落到地面。
73、本发明与现有技术相比具有如下优点:
74、1、本发明采用了无人机群分组机制,可基于任务数量、无人机功能类型、无人机尺寸、收益函数等因素,根据任务具体情况选用其中一种或者多种机制。
75、2、本发明采用了子无人机群小组中心推举机制,可根据无人机群拓扑结构、工作性能、故障替换等因素,根据具体任务灵活选用其中一种或多种机制。
76、3、本发明采用了子无人机群队形设计机制,使用平均分配原则,将非中心无人机节点均匀分布到中心无人机节点四周,并给出中心无人机节点与非中心无人机节点的距离计算方式。
77、4、本发明采用了子无人机群内部队形保持机制,可保持无人集群队形不变,为无人机群协同飞行控制奠定基础。
78、5、本发明采用了分布式无人机群组成机制,由子无人机群中心无人机节点组成分布式无人机群,可以有效降低分布式无人机群规模,并保留分布式无人机群的生存能力。
79、6、本发明采用了分布式无人机群分布式控制机制,将飞行空间中的其余无人机和障碍物都作为障碍物,基于人工势场法实现无人机群分布式飞行。
80、7、本发明采用了无人机群分布式安全飞行方法,将一个小组的无人机群作为一个整体障碍物处理,处理方式简单有效,并降低计算量。
81、8、本发明采用了无人机群信息共享机制,小组内部非中心节点无人机将信息共享给中心节点无人机,中心节点无人机将非中心无人机节点下一步航点发送给非中心无人机节点;将每个小组的中心无人机节点组成分布式无人机群,分布式无人机群内部实现信息双向共享,信息共享量较小,可以综合集中式和分布式的优点。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198375.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表