在不确定环境下的无人机和无人车协同避障方法及系统
- 国知局
- 2024-07-31 23:44:42
本发明涉及数据处理,具体而言,涉及一种在不确定环境下的无人机和无人车协同避障方法及系统。
背景技术:
1、无人机和无人车的协同作业应用在许多领域,如监控、农业、搜救、交通运输等。这种协同作业依赖于高效的通信和控制策略,以确保两种类型的机器人能够互补地执行任务。其中,对充满障碍物的位置环境的探索是机器人的一项重要应用。在不确定环境下,当多无人机、多无人车协同作业时,容易因机器人在不确定环境的感知数据的不确定性和环境变化,使得无人机之间容易发生碰撞,以及无人车之间容易发生碰撞。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种在不确定环境下的无人机和无人车协同避障方法及系统,能够改善在不确定环境下无人机、无人车容易发生碰撞的问题。
2、为实现上述技术目的,本技术采用的技术方案如下:
3、第一方面,本技术实施例提供了一种在不确定环境下的无人机和无人车协同避障方法,应用于协同避障系统,所述协同避障系统包括m台无人机以及n台无人车,m、n均为大于1的整数,所述方法包括:
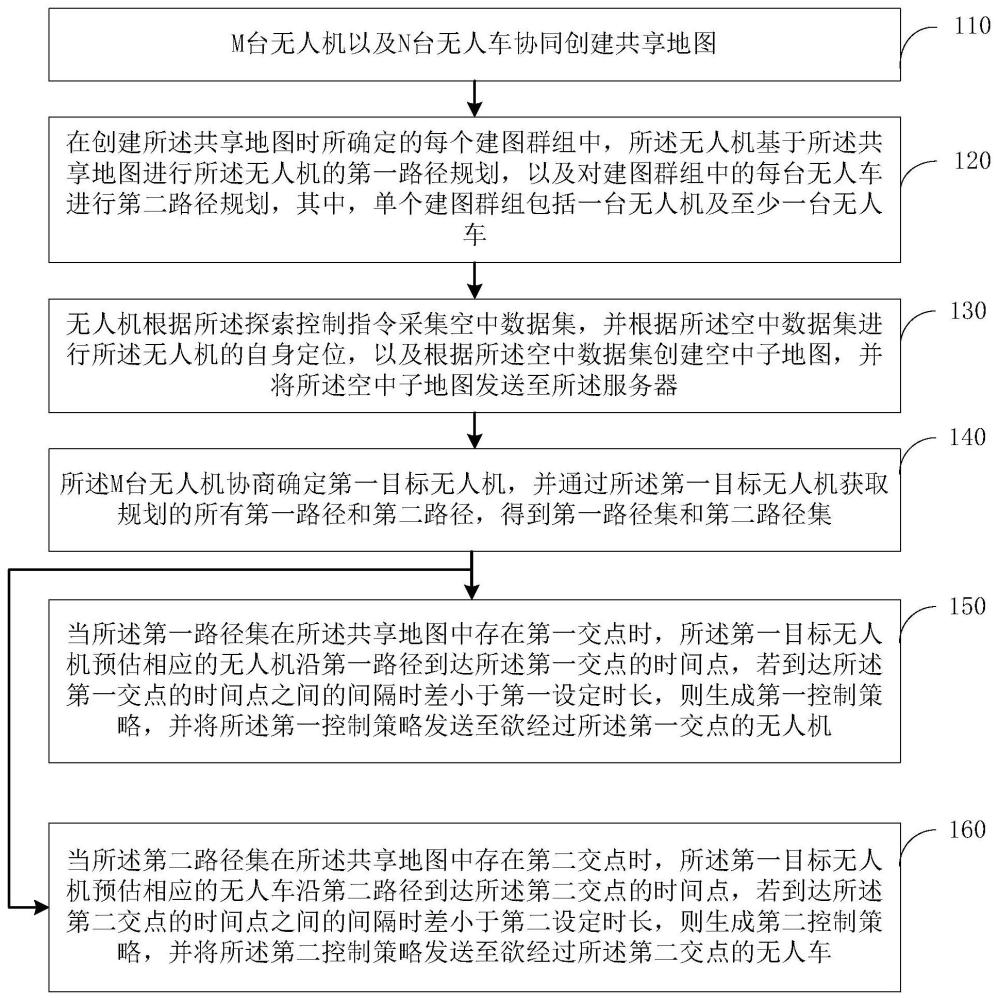
4、所述m台无人机以及所述n台无人车协同创建共享地图;
5、在创建所述共享地图时所确定的每个建图群组中,所述无人机基于所述共享地图进行所述无人机的第一路径规划,以及对建图群组中的每台无人车进行第二路径规划,其中,单个建图群组包括一台无人机及至少一台无人车;
6、所述m台无人机协商确定第一目标无人机,并通过所述第一目标无人机获取规划的所有第一路径和第二路径,得到第一路径集和第二路径集;
7、当所述第一路径集在所述共享地图中存在第一交点时,所述第一目标无人机预估相应的无人机沿第一路径到达所述第一交点的时间点,若到达所述第一交点的时间点之间的间隔时差小于第一设定时长,则生成第一控制策略,并将所述第一控制策略发送至欲经过所述第一交点的无人机,以使欲经过所述第一交点的无人机以所述第一控制策略控制飞行,其中,所述第一控制策略用于控制相应无人机以大于所述第一设定时长的间隔时差经过所述第一交点,或控制相应无人机重新规划得到在所述共享地图不相交的第一路径;
8、当所述第二路径集在所述共享地图中存在第二交点时,所述第一目标无人机预估相应的无人车沿第二路径到达所述第二交点的时间点,若到达所述第二交点的时间点之间的间隔时差小于第二设定时长,则生成第二控制策略,并将所述第二控制策略发送至欲经过所述第二交点的无人车,以使欲经过所述第二交点的无人车以所述第二控制策略控制行驶,所述第二控制策略用于控制相应无人车以大于所述第二设定时长的间隔时差经过所述第二交点。
9、结合第一方面,在一些可选的实施方式中,所述m台无人机以及所述n台无人车协同创建共享地图,包括:
10、基于单台无人机和单台无人车的间隔距离,所述m台无人机和所述n台无人车协商得到多个建图群组;
11、在每个建图群组中,所述无人机采集空中数据集,并基于所述空中数据集创建空中子地图;
12、在每个建图群组中,每台无人车采集地面数据集,并基于所述地面数据集创建地面子地图;
13、在每个建图群组中,每台无人车将创建的所述地面子地图发送至所述无人机,所述无人机通过地图融合策略,将所述空中子地图及每台无人车的所述地面子地图融合得到第一全局地图;
14、所述m台无人机协商确定第二目标无人机,并通过所述第二目标无人机接收其他无人机的第一全局地图,其中,所述其他无人机为所述m台无人机中除去所述第二目标无人机以外的无人机;
15、所述第二目标无人机通过所述地图融合策略,将所有的第一全局地图进行地图融合,得到第二全局地图,并将所述第二全局地图作为共享地图,发送至所述其他无人机。
16、结合第一方面,在一些可选的实施方式中,所述无人机采集空中数据集,并基于所述空中数据集创建空中子地图,包括:
17、所述无人机通过搭载的激光雷达、惯性测量单元和相对位姿误差模块采集得到空中数据集;
18、所述无人机基于所述空中数据集,通过slam算法创建得到所述空中子地图,并确定所述无人机的飞行里程。
19、结合第一方面,在一些可选的实施方式中,每台无人车采集地面数据集,并基于所述地面数据集创建地面子地图,包括:
20、每台无人车通过搭载的激光雷达、轮式里程计、相对位姿误差模块,采集得到地面数据集;
21、每台无人车基于自身采集的地面数据集,通过ekf slam算法创建得到所述地面子地图。
22、结合第一方面,在一些可选的实施方式中,所述无人机通过地图融合策略,将所述空中子地图及每台无人车的所述地面子地图融合得到第一全局地图,包括:
23、对所述空中子地图的空中点云数据和所述地面子地图的地面点云数据进行下采样;
24、对下采样后的空中点云数据和地面点云数据进行点云配准,得到所述第一全局地图。
25、结合第一方面,在一些可选的实施方式中,基于单台无人机和单台无人车的间隔距离,所述m台无人机和所述n台无人车协商得到多个建图群组,包括:
26、基于信号衰减与距离的对应关系,根据每台无人机与无人车在数据交互过程中,发送的测距无线信号的第一信号强度和接收所述测距无线信号的第二信号强度,确定单台无人机和单台无人车的间隔距离;
27、针对每台无人机,将所述无人机及所述间隔距离最近且不超过指定数量的无人车确定为一个建图群组,其中,每台无人车不同时处于两个建图群组中。
28、结合第一方面,在一些可选的实施方式中,所述无人机基于所述共享地图进行所述无人机的第一路径规划,以及对建图群组中的每台无人车进行第二路径规划,包括:
29、所述无人机基于预设最大半径进行膨胀,并在所述共享地图中采用第一路径规划算法对膨胀后的无人机进行路径规划,得到带时间窗的第一路径;
30、所述无人机基于建图群组中的每台无人车在所述共享地图中的位置,在所述共享地图中采用第二路径规划算法,对建图群组中的每台无人车进行路径规划,得到带时间窗的第二路径。
31、结合第一方面,在一些可选的实施方式中,所述m台无人机协商确定第一目标无人机,包括:
32、所述m台无人机将当前运算负荷最小的无人机,确定为所述第一目标无人机。
33、结合第一方面,在一些可选的实施方式中,所述方法还包括:
34、所述协同避障系统基于所述m台无人机以及所述n台无人车采集的新数据集,更新所述共享地图。
35、第二方面,本技术实施例还提供一种协同避障系统,所述协同避障系统包括m台无人机以及n台无人车,m、n均为大于1的整数;
36、所述m台无人机以及所述n台无人车用于协同创建共享地图;
37、在创建所述共享地图时所确定的每个建图群组中,所述无人机用于基于所述共享地图进行所述无人机的第一路径规划,以及对建图群组中的每台无人车进行第二路径规划,其中,单个建图群组包括一台无人机及至少一台无人车;
38、所述m台无人机协商用于确定第一目标无人机,并通过所述第一目标无人机获取规划的所有第一路径和第二路径,得到第一路径集和第二路径集;
39、当所述第一路径集在所述共享地图中存在第一交点时,所述第一目标无人机用于预估相应的无人机沿第一路径到达所述第一交点的时间点,若到达所述第一交点的时间点之间的间隔时差小于第一设定时长,则生成第一控制策略,并将所述第一控制策略发送至欲经过所述第一交点的无人机,以使欲经过所述第一交点的无人机以所述第一控制策略控制飞行,其中,所述第一控制策略用于控制相应无人机以大于所述第一设定时长的间隔时差经过所述第一交点,或控制相应无人机重新规划得到在所述共享地图不相交的第一路径;
40、当所述第二路径集在所述共享地图中存在第二交点时,所述第一目标无人机用于预估相应的无人车沿第二路径到达所述第二交点的时间点,若到达所述第二交点的时间点之间的间隔时差小于第二设定时长,则生成第二控制策略,并将所述第二控制策略发送至欲经过所述第二交点的无人车,以使欲经过所述第二交点的无人车以所述第二控制策略控制行驶,所述第二控制策略用于控制相应无人车以大于所述第二设定时长的间隔时差经过所述第二交点。
41、采用上述技术方案的发明,具有如下优点:
42、在本技术提供的技术方案中,由m台无人机以及n台无人车协同创建共享地图,然后由无人机基于共享地图进行无人机的第一路径规划,以及对无人车进行第二路径规划。接着,利用m台无人机中的第一目标无人机,收集所有第一路径和第二路径,得到第一路径集和第二路径集。当第一路径集在共享地图中存在第一交点,若到达第一交点的时间点之间的间隔时差小于第一设定时长,则生成第一控制策略,以使欲经过第一交点的无人机以第一控制策略控制飞行,以避免无人机碰撞。当第二路径集在共享地图中存在第二交点,到达第二交点的时间点之间的间隔时差小于第二设定时长,则生成第二控制策略,以使欲经过第二交点的无人车以第二控制策略控制行驶,以避免无人车碰撞。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表