-
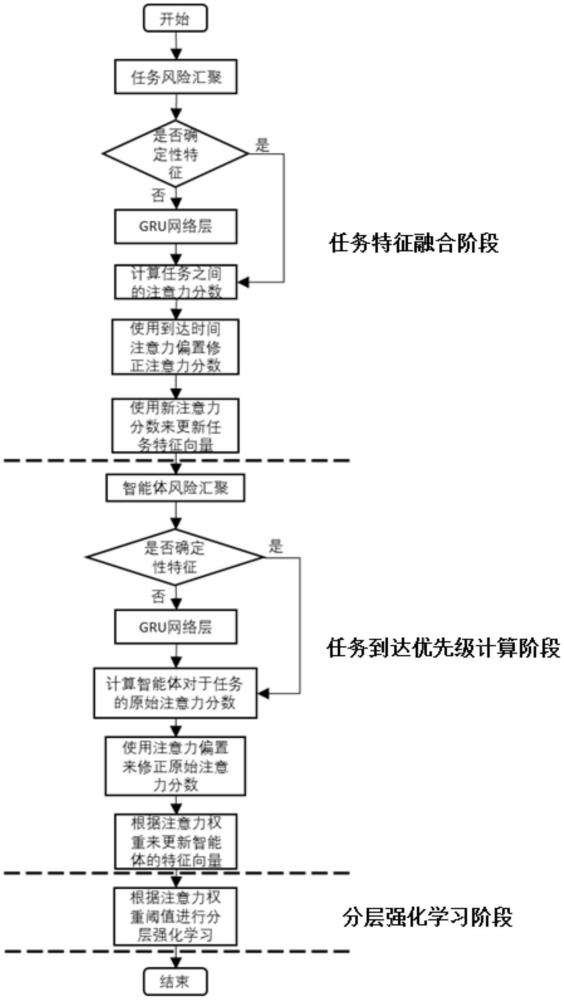
针对无人机群中辅助任务不确定到达时间特性的任务目标分配方法
本发明涉及实际高动态博弈场景下大规模混杂无人机群体中多任务分配领域,具体涉及一种针对无人机群中辅助任务不确定到达时间特性的任务目标分配方法。背景技术:1、在实际高动态博弈场景下,多重耦合动态特性与大规......
-
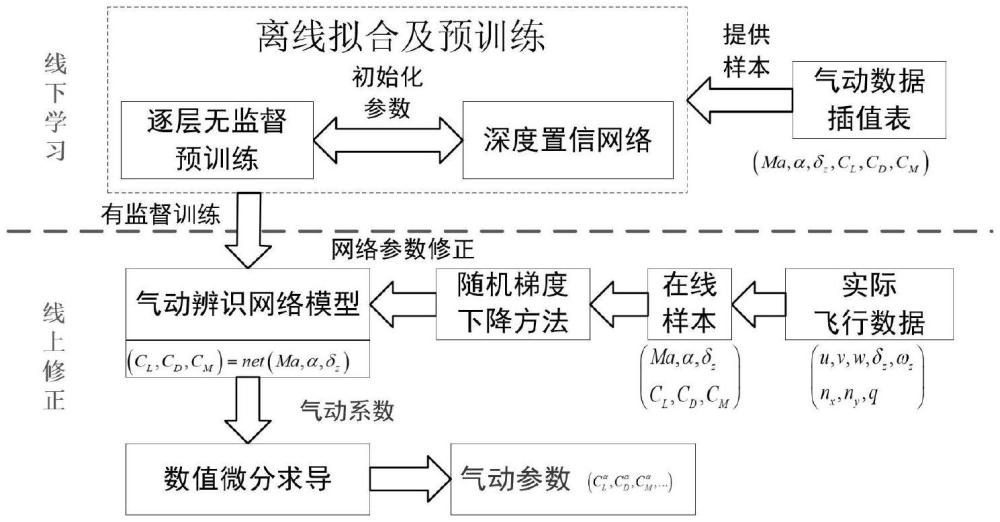
一种不确定外形飞行器气动参数辨识方法
本发明涉及一种飞行器气动参数辨识方法,具体涉及一种不确定外形飞行器气动参数辨识方法。背景技术:1、不确定外形飞行器可通过变形改变气动特性,具备更强的环境与任务适应能力,受到世界各国的争相研究。然而,相......
-
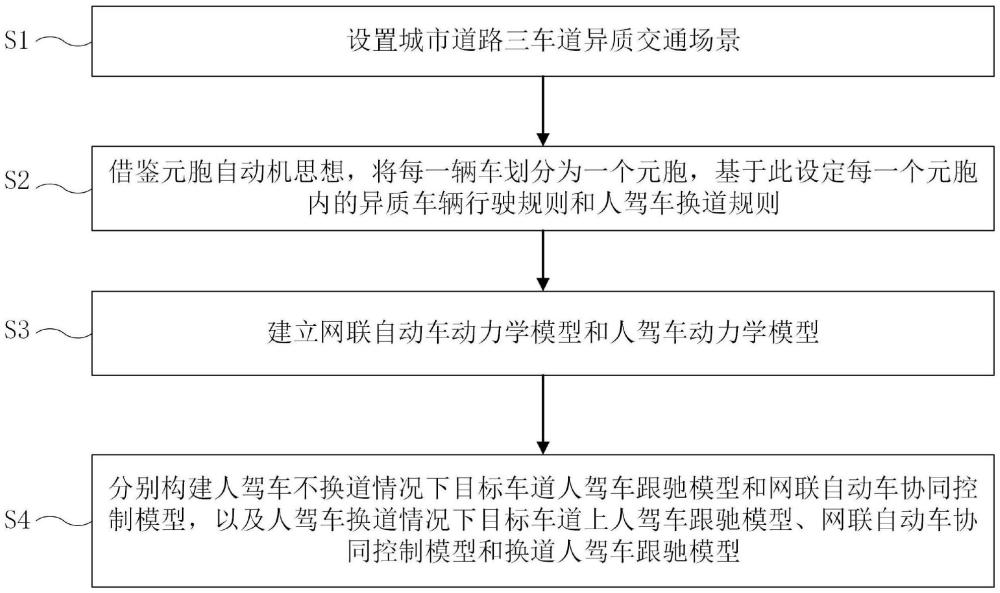
人驾车不确定换道下基于元胞自动机的混行车辆协同方法
本发明属于智能交通,涉及一种人驾车不确定换道下基于元胞自动机的混行车辆协同方法。背景技术:1、随着智能车路协同系统的持续发展和智能网联车辆通信技术、智能决策控制相关技术的不断成熟,车辆能够实时获取更多......
-
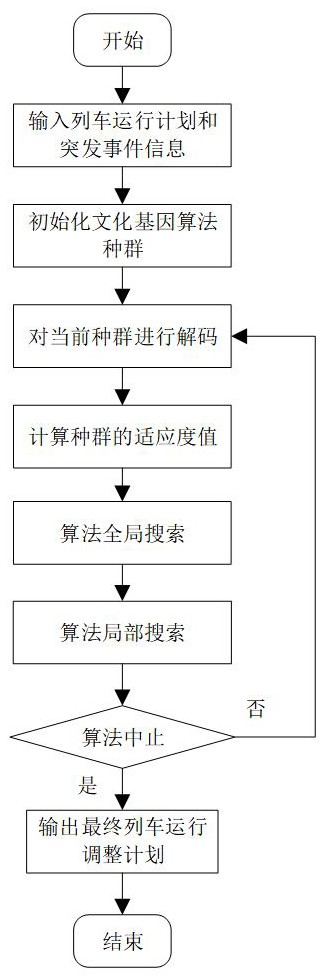
一种不确定环境下高铁列车运行调整方法及其应用与流程
在本发明涉及一种调整方法,尤其是涉及一种不确定环境下高铁列车运行调整方法及其应用,属于铁路行车调度指挥领域。背景技术:1、在高速铁路运营中,列车运行调整是面临突发事件干扰下亟需解决的关键问题。目前高铁......
-
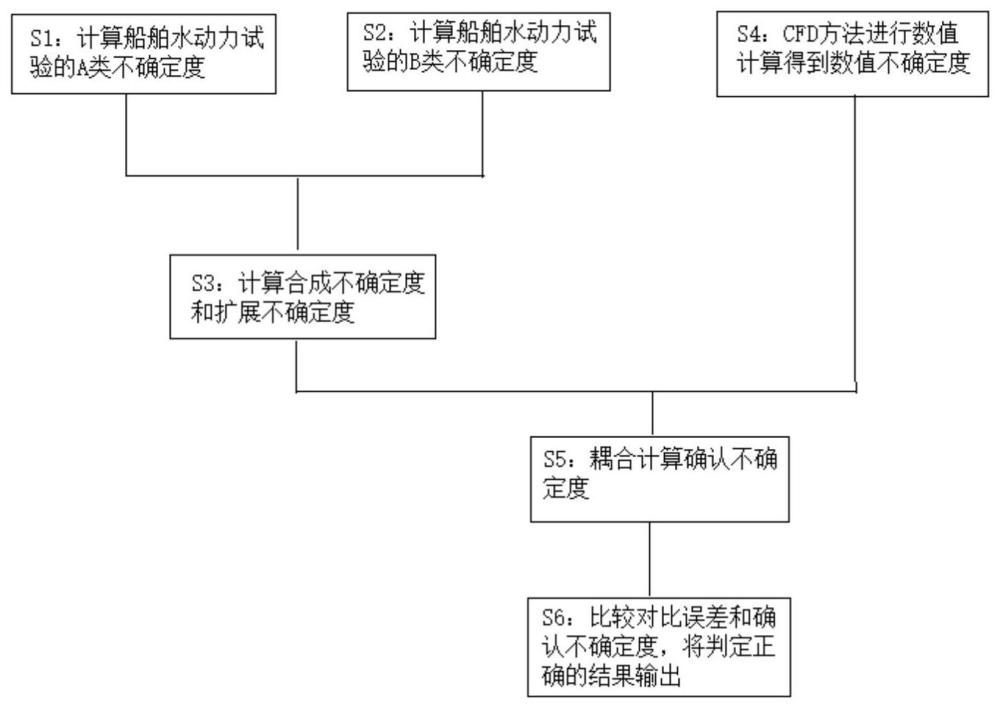
船模试验和数值计算相耦合的船舶水动力不确定度分析方法与流程
本发明涉及船舶水动力试验领域,具体涉及一种船模试验和数值计算相耦合的船舶水动力不确定度分析方法。背景技术:1、船舶水动力试验技术是航运业和造船业发展必要的技术基础,对于船舶性能的技术变革和节能减排战略......
-
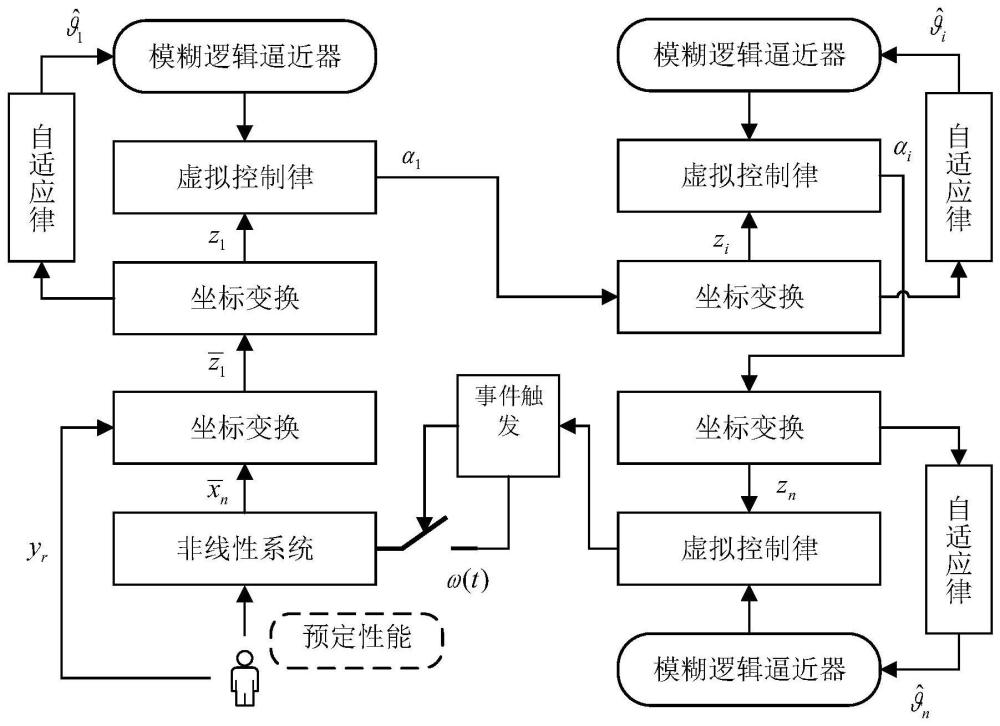
一种具有预定性能的不确定非线性系统的事件触发固定时间模糊控制方法
本发明涉及一般非线性系统智能控制,具体为一种具有预定性能的不确定非线性系统的事件触发固定时间模糊控制方法。背景技术:1、在过去的几十年里,反步控制受到了相当大的关注。假设系统动力学中的非线性项是已知的......
-
二阶非线性不确定参数多智能体系统及其控制方法
本发明涉及多智能体系统及其控制方法,具体涉及二阶非线性不确定参数多智能体系统及其控制方法。背景技术:1、随着通讯技术与控制理论的发展,多智能体控制算法与在二阶非线性不确定系统中的应用得到越来越多的关注......
-
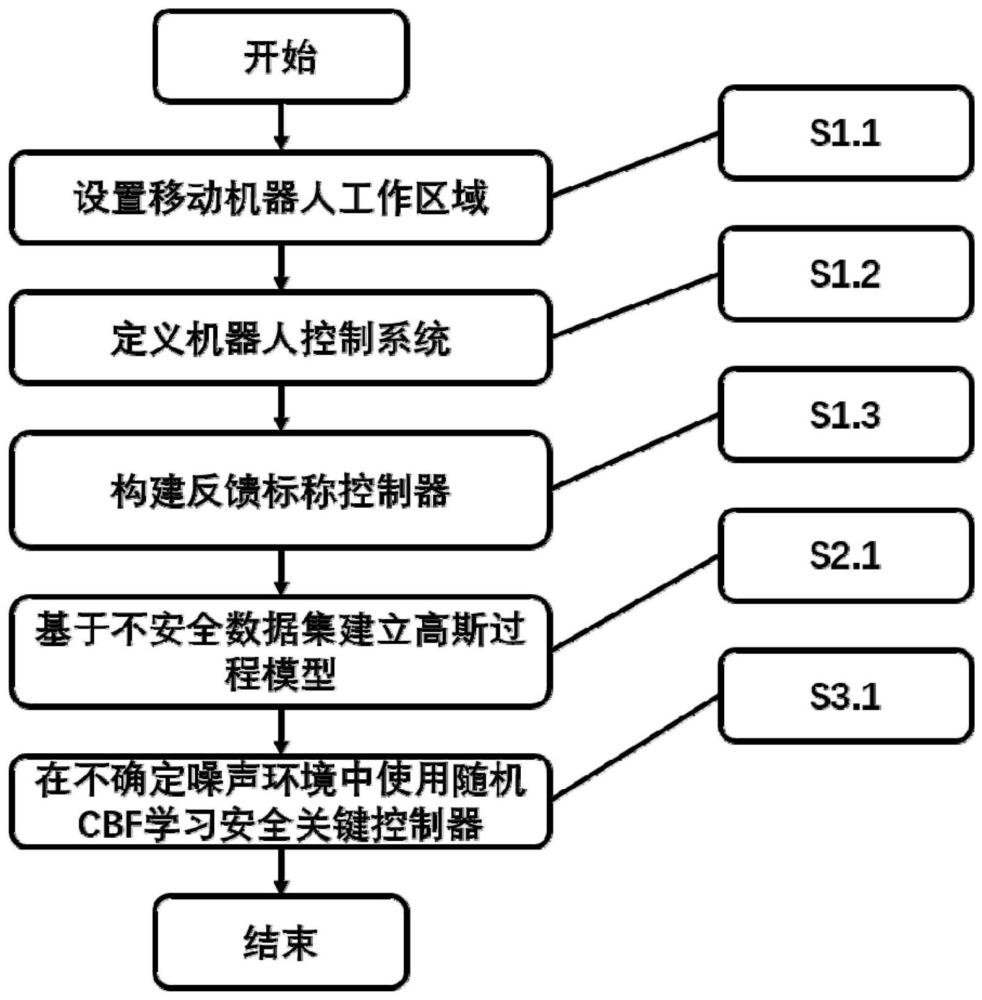
一种不确定噪声环境下的迭代学习安全临界控制方法
本发明涉及机器人传感器控制/安全关键系统的,尤其涉及一种不确定噪声环境下的迭代学习安全临界控制方法,是基于随机控制障碍函数在不确定噪声环境下学习安全关键控制。背景技术:1、在不确定噪声环境中使用随机控......
-

一种基于自适应观测器的不确定线性连续系统时变故障快速估计方法
本发明涉及一种基于自适应观测器的不确定线性连续系统时变故障快速估计方法,属于线性连续系统故障估计。背景技术:1、由于系统在运行中经常受到内外部环境的影响,容易导致发生故障,进而影响系统运行可靠性,因此......
-
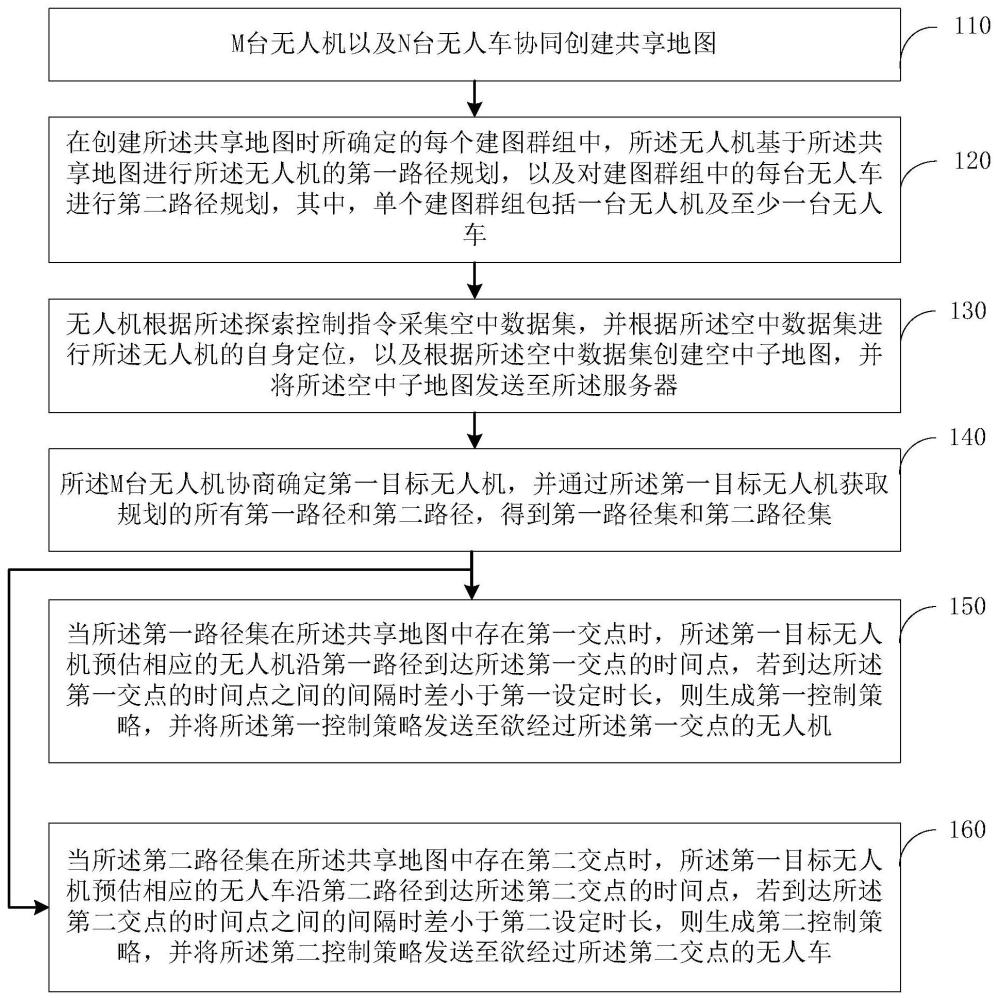
在不确定环境下的无人机和无人车协同避障方法及系统
本发明涉及数据处理,具体而言,涉及一种在不确定环境下的无人机和无人车协同避障方法及系统。背景技术:1、无人机和无人车的协同作业应用在许多领域,如监控、农业、搜救、交通运输等。这种协同作业依赖于高效的通......
-
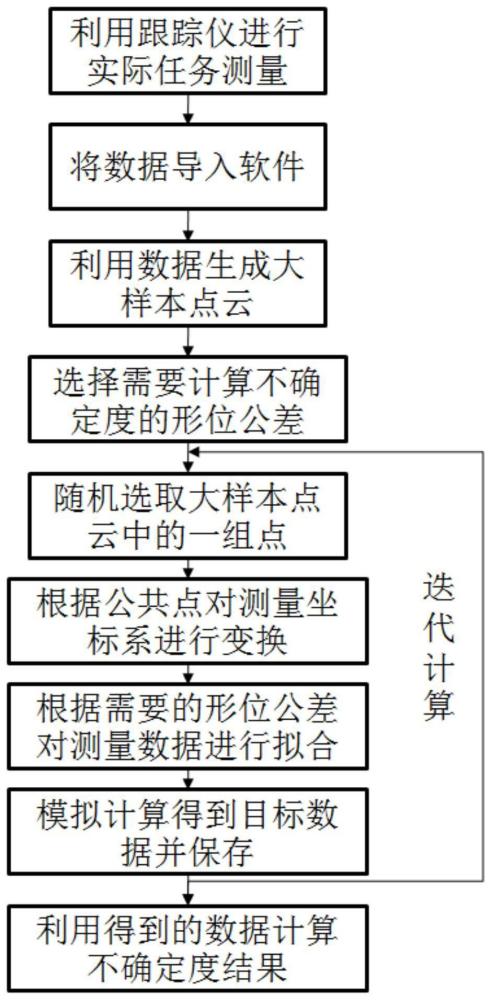
一种基于概率仿真的航天复杂任务不确定度评价方法与流程
本发明属于测量误差评定,涉及一种基于概率仿真的航天复杂任务不确定度评价方法。背景技术:1、经过修正的测量结果仍然有一定的误差,它们的具体数值是未知的,因此无法以其误差的具体数值评定测量结果的好坏、优劣......
-

一种基于数据增强估计模型不确定度的方法及装置
本发明涉及深度学习领域,尤其涉及的一种基于数据增强估计模型不确定度的方法及装置。背景技术:1、近年来,随着深度学习技术的发展,其在图像识别、自动驾驶、自然语言处理等多个领域展现了其优秀的性能与强大的应......
技术新讯 > 不确定 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01