-
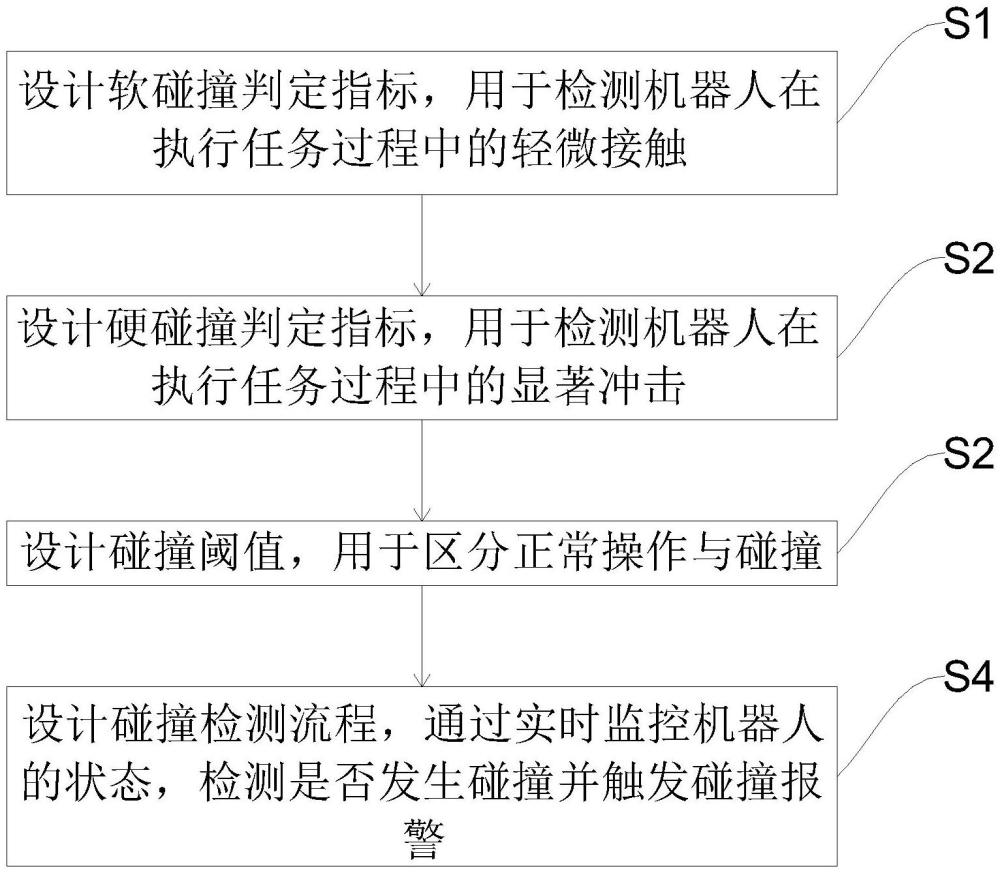
一种基于电流波动与动量观测器的工业机器人碰撞检测方法与流程
本发明涉及机器人碰撞检测领域,特别是涉及一种基于电流波动与动量观测器的工业机器人碰撞检测方法。背景技术:1、随着制造业对自动化和智能化水平要求的不断提高,工业机器人的应用日益广泛。在高效率、高灵活性的......
-
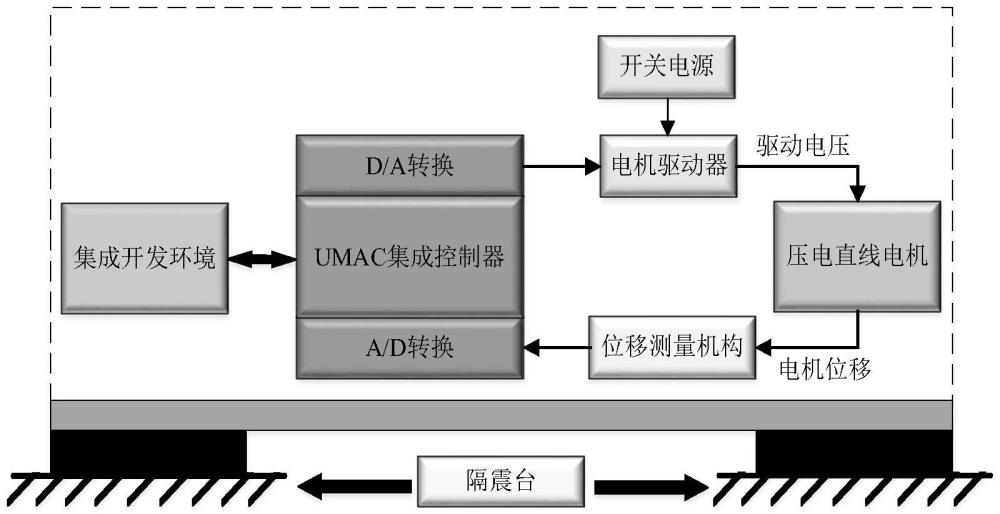
压电直线电机基于扩张状态观测器的迭代超螺旋滑模控制方法
本发明属于微纳控制,更具体地,涉及一种压电直线电机基于扩张状态观测器的迭代超螺旋滑模控制方法。背景技术:1、随着先进制造业的快速发展,各种智能设备逐渐趋近于小型化、高度集成化,加工制造工艺也逐渐精确到......
-
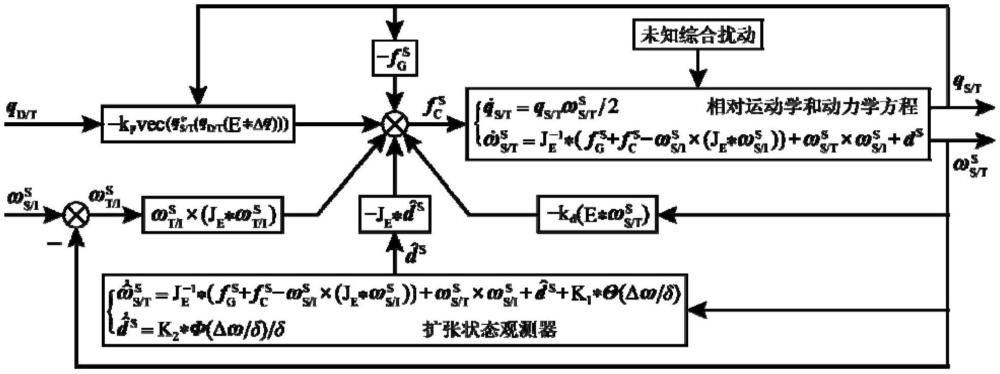
基于扩张状态观测器的非合作目标临近机动跟踪控制方法
本发明涉及航天器临近机动控制,具体为基于扩张状态观测器的非合作目标临近机动跟踪控制方法。背景技术:1、航航天器临近机动通常被定义为在轨运行航天器飞行接近另一个在轨物体的操作,临近机动是实施在轨服务的前......
-
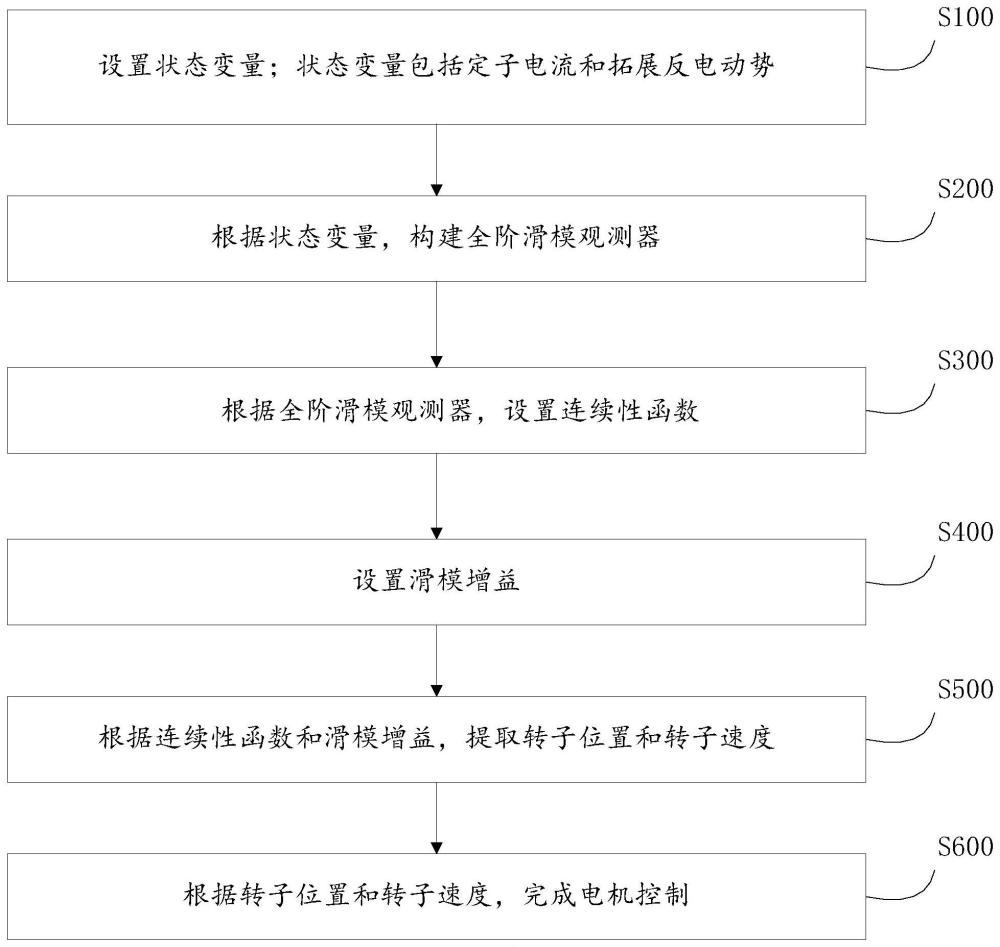
基于改进全阶滑模观测器的风力发电机的无位置传感器控制方法
本申请涉及电机控制的,尤其涉及一种基于改进全阶滑模观测器的风力发电机的无位置传感器控制方法。背景技术:1、永磁直驱海上风电系统在进行最大功率点跟踪(mppt)控制时需要永磁同步发电机(pmsg)转子位......
-
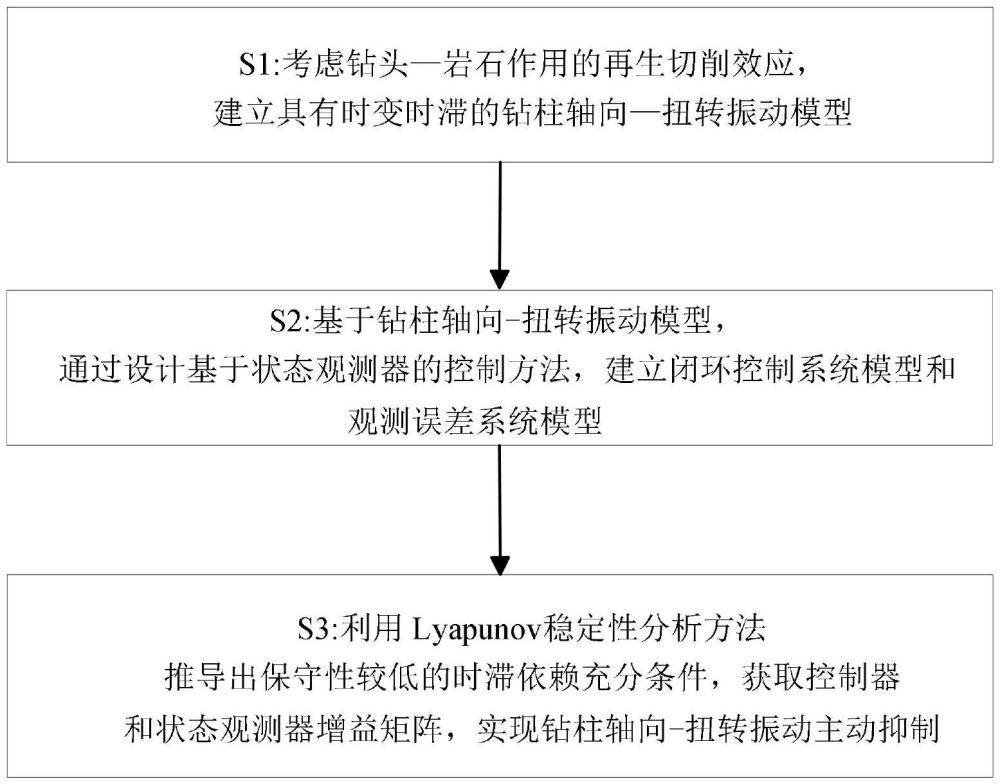
基于状态观测器的钻柱轴向—扭转振动抑制方法及装置
本发明涉及地质钻探工程领域,尤其涉及一种基于状态观测器的钻柱轴向—扭转振动抑制方法及装置。背景技术:1、随着全球能源需求的不断增长,石油和天然气等众多地下资源作为主要能源的地位不可动摇,为了获取地下的......
-
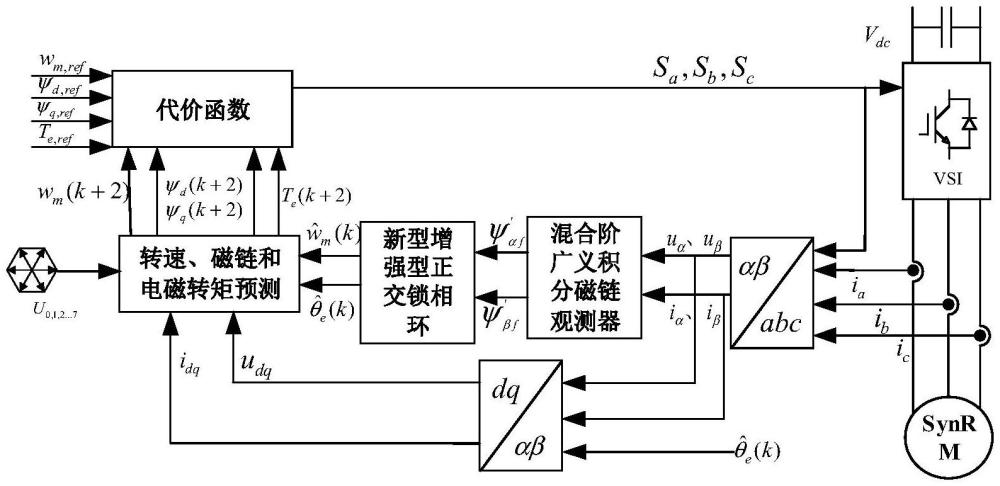
同步磁阻电机新型磁链观测器模型预测速度控制方法
本发明属于同步磁阻电机控制方法,具体涉及同步磁阻电机新型磁链观测器模型预测速度控制方法。背景技术:1、同步磁阻电机由于其坚固可靠,高效节能,调速范围宽,性价比高等优点被广泛应用于工、农业生产中。随着科......
-
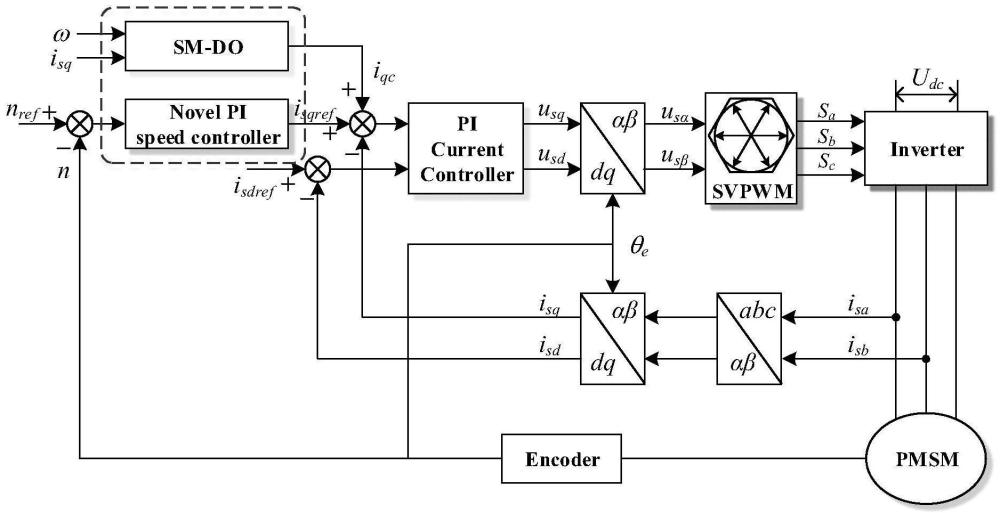
基于扩展滑模扰动观测器的永磁直驱电机抗扰动控制方法
本发明涉及电机控制领域,更具体地,尤其涉及一种基于扩展滑模扰动观测器的永磁直驱电机抗扰动控制方法。背景技术:1、相较于感应电机和磁阻电机,采用高磁能积永磁体励磁的永磁直驱电机具有高功率密度、高效率、高......
-
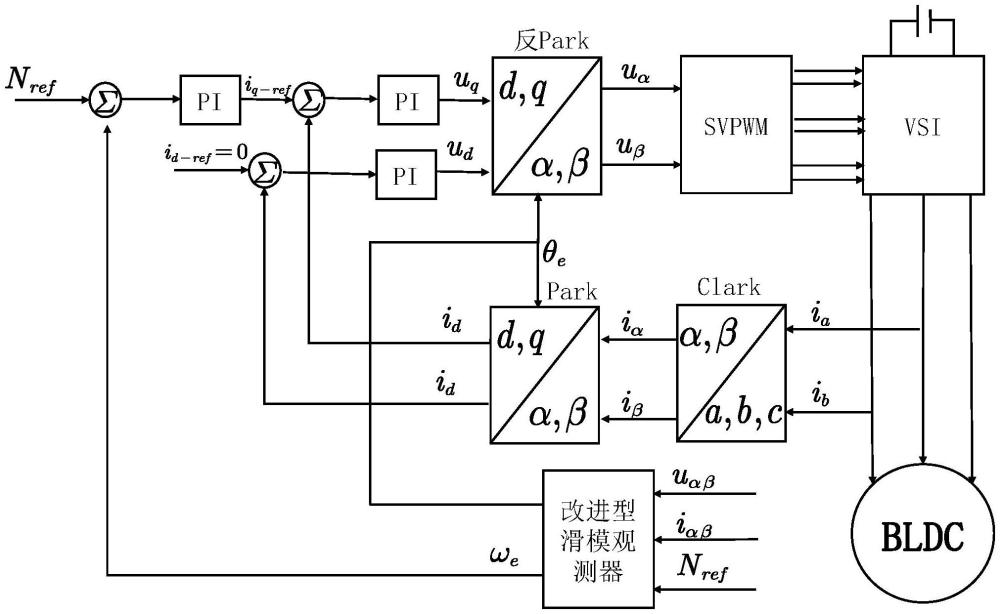
一种滑模观测器的抖振抑制方法
本发明涉及直流无刷电机无感foc控制,具体涉及一种滑模观测器的抖振抑制方法。背景技术:1、无位置传感器控制是指不用霍尔元件等硬件传感器电路来获取转子位置,而是通过测量电机绕组电流、磁链、电压等可测量信......
-
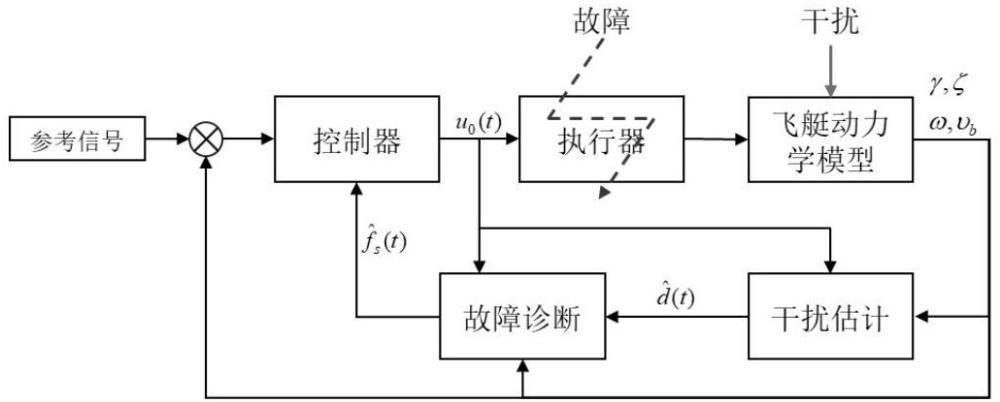
一种基于干扰观测器的平流层飞艇故障诊断方法
本发明属于飞行器,特别涉及一种基于干扰观测器的平流层飞艇故障诊断方法。背景技术:1、在航空航天领域,平流层飞艇是一种具有潜在应用前景的飞行器类型。平流层飞艇可以在平流层大气层中进行长时间的飞行,并且具......
-
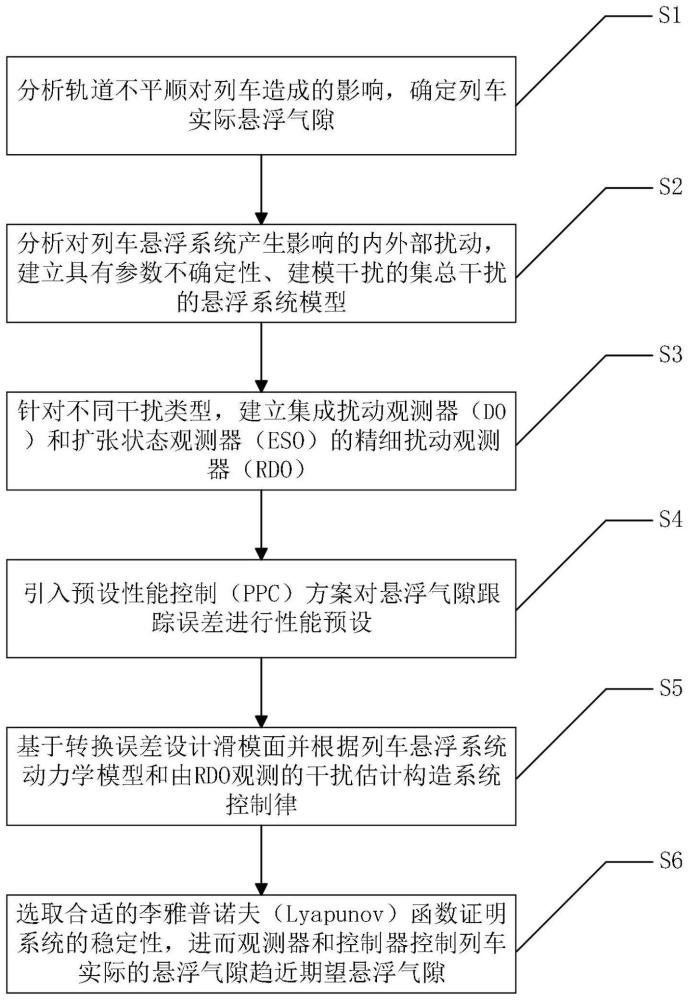
基于精细干扰观测器的磁浮列车规定性能复合控制方法
本发明涉及列车悬浮系统控制,具体涉及一种基于精细干扰观测器的轨道不平顺工况下的高速磁悬浮列车规定性能固定时间控制方法。背景技术:1、高速磁悬浮列车(ems)依靠无接触悬浮导向大大提高了列车运行速度,方......
-
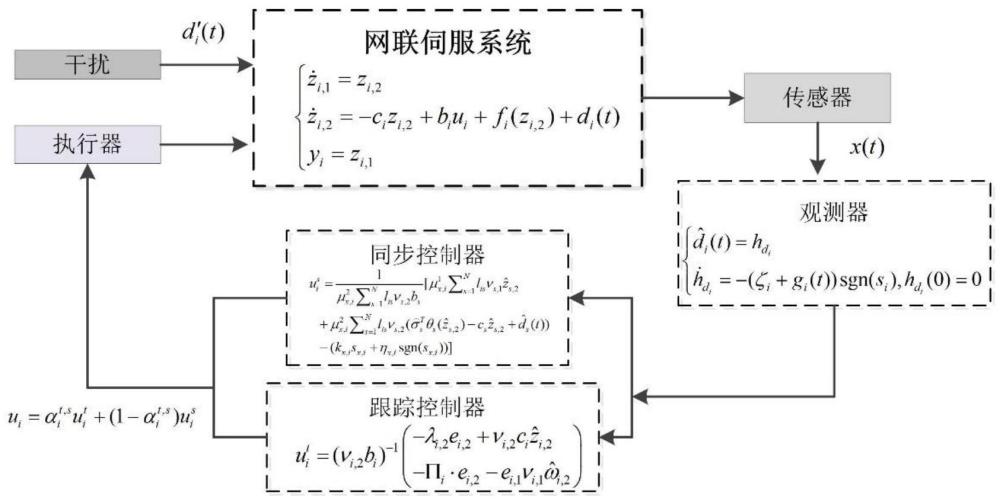
一种基于自适应神经网络观测器的网联伺服系统跟踪及同步控制方法
本发明涉及干扰下网联伺服系统的数学模型建立、自适应神经网络观测器设计、自适应神经网络跟踪策略和滑模同步控制策略设计。背景技术:1、网联系统具有结构灵活、信息交换方便等优点。近年来,无论是在理论研究还是......
-

一种基于元模型干扰观测器的激光通信终端指向控制方法
本发明属于航天控制领域,具体涉及一种基于元模型干扰观测器的激光通信终端指向控制方法。背景技术:::1、激光通信终端指向控制性能是影响星间激光通信的建链速度、通信质量及效率的关键因素。在空间微重力环境下......
-
基于扩张观测器和鸽群优化的高速飞行器动态逆控制方法
本发明涉及高超声速飞行器纵向运动控制领域,尤其是一种具有强鲁棒性的跟踪控制方法,适用于高超声速飞行器在强不确定环境下的跟踪控制。背景技术:1、高超声速飞行器纵向运动模型具备强烈的非线性和耦合性,是一个......
-

基于自适应扩张状态观测器的柔性机构模型参数估计方法
本发明涉及一种柔性机构模型参数的估计方法,具体涉及一种基于自适应扩张状态观测器的柔性机构模型参数估计方法。背景技术:1、在柔性机构控制器设计中,模型参数需要预先已知;然而,在实际工程中,模型参数通常是......
-

基于中间变量观测器的多领航无人机系统容错编队控制方法
本发明涉及动态系统监控与容错控制,尤其涉及基于中间变量观测器的多领航无人机系统容错编队控制方法。背景技术:1、多智能体系统已在多个领域引起了广泛关注,如无人机群协同、卫星通信网络和移动机器人的协同控制......
-
一种基于观测器级联的线性系统故障诊断方法
本发明涉及系统故障诊断,具体而言,为一种基于观测器级联的线性系统故障诊断方法。背景技术:1、自上世纪40年代以来,自动控制技术已经广泛应用于机器人、化工、航空航天、核电站等实际工程领域,并且在二十一世......
-

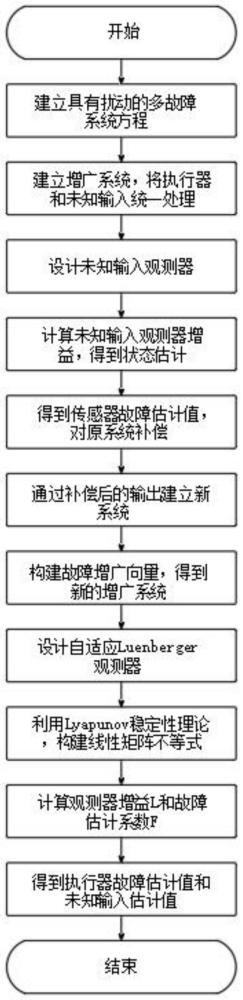
一种基于自适应观测器的不确定线性连续系统时变故障快速估计方法
本发明涉及一种基于自适应观测器的不确定线性连续系统时变故障快速估计方法,属于线性连续系统故障估计。背景技术:1、由于系统在运行中经常受到内外部环境的影响,容易导致发生故障,进而影响系统运行可靠性,因此......
-
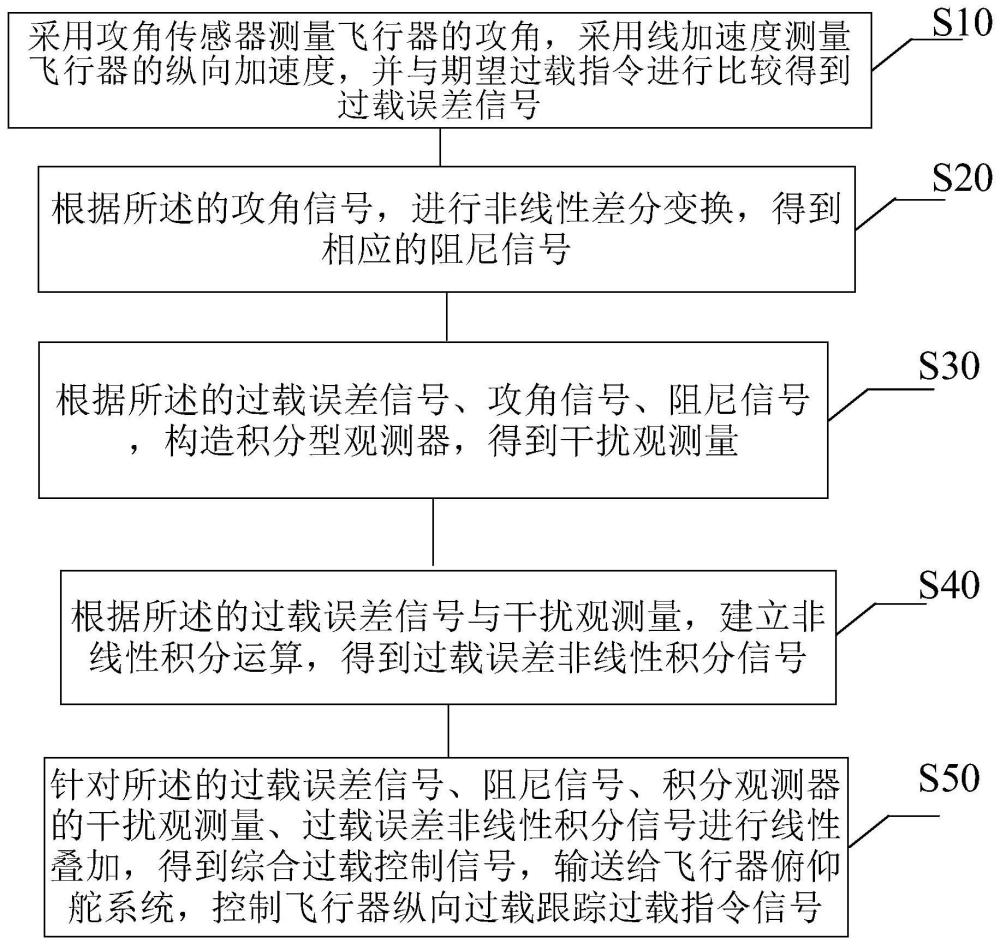
一种采用积分观测器的飞行器过载控制方法
本发明涉及飞行器过载控制领域,尤其涉及一种采用攻角测量与过载测量与积分型干扰观测的飞行器纵向过载控制方法。背景技术:1、飞行器控制领域中比较常用的是姿态控制,其具有悠久的历史与良好的可靠性。一般采用陀......
-
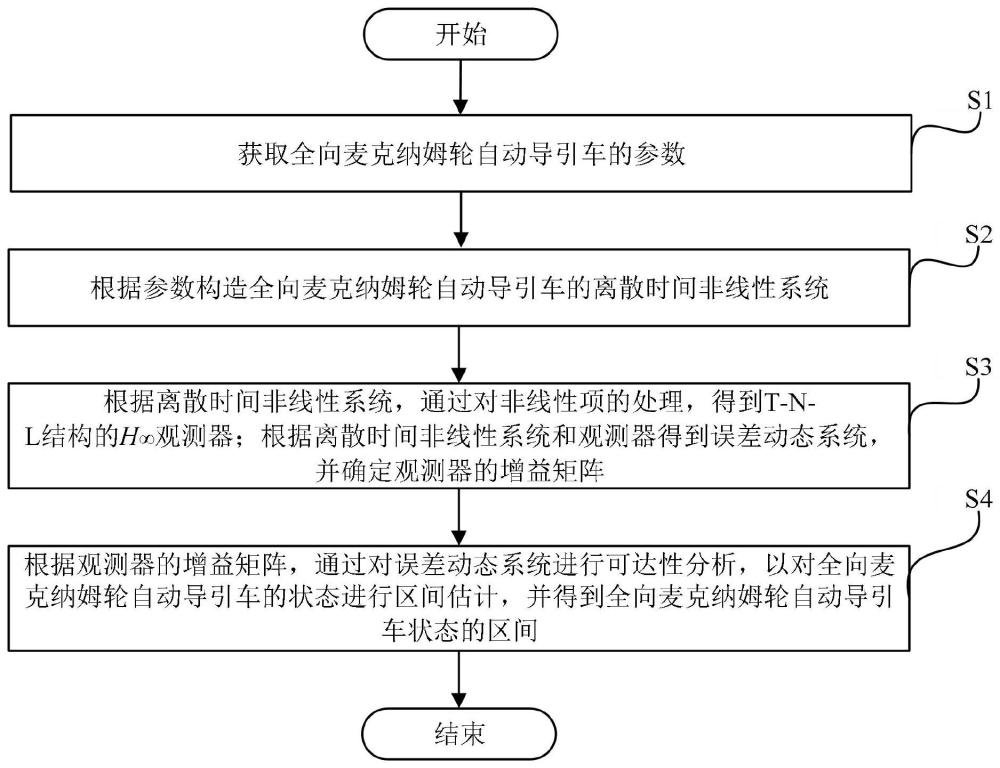
一种基于观测器和可达性分析的区间估计方法及系统
本发明涉及计算机控制,尤其涉及一种基于观测器和可达性分析的区间估计方法及系统。背景技术:1、自动导引车(automatic guided vehicle,简称agv)是一种具备安全保护以及各种移载功能......
-

有限时间观测器下的多智能体滑模容错控制方法
本发明涉及有限时间观测器下的多智能体滑模容错控制方法,属于多智能体系统的容错一致性控制。背景技术:1、随着社会、通信、人工智能等的快速发展,多智能体系统已成为控制工程领域的研究热点。由于智能体之间个体......
-

基于干扰观测器的四足机器人自适应模型预测控制方法
本发明涉及机器人控制,尤其涉及一种基于干扰观测器的四足机器人自适应模型预测控制方法。背景技术:1、四足机器人是一类专注于模拟狗和猎豹等动物的灵活运动,使它们能够以娴熟的方式穿越具有挑战性的地形的机器人......
-

基于有限时间观测器的高速列车快速非奇异终端滑模控制方法
本发明涉及列车控制,尤其是涉及基于有限时间观测器的高速列车快速非奇异终端滑模控制方法。背景技术:1、高速列车作为一种安全、高效、绿色的交通工具,近年来已在世界范围内得到了迅速发展。随着自动化、智能化水......
-
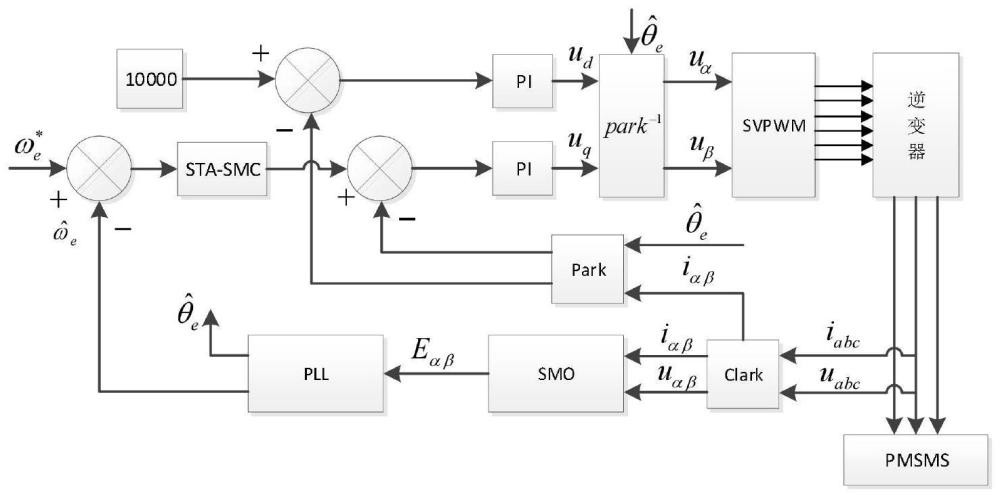
基于改进的观测器与高阶滑模融合的控制方法及系统
本发明涉及pmsms控制,尤其涉及基于改进的观测器与高阶滑模融合的控制方法及系统。背景技术:1、由于pmsms技术的蓬勃发展,其高速化已作为未来数控系统开发的重点所在;然而,由于电传动主轴在高速运行时......
-
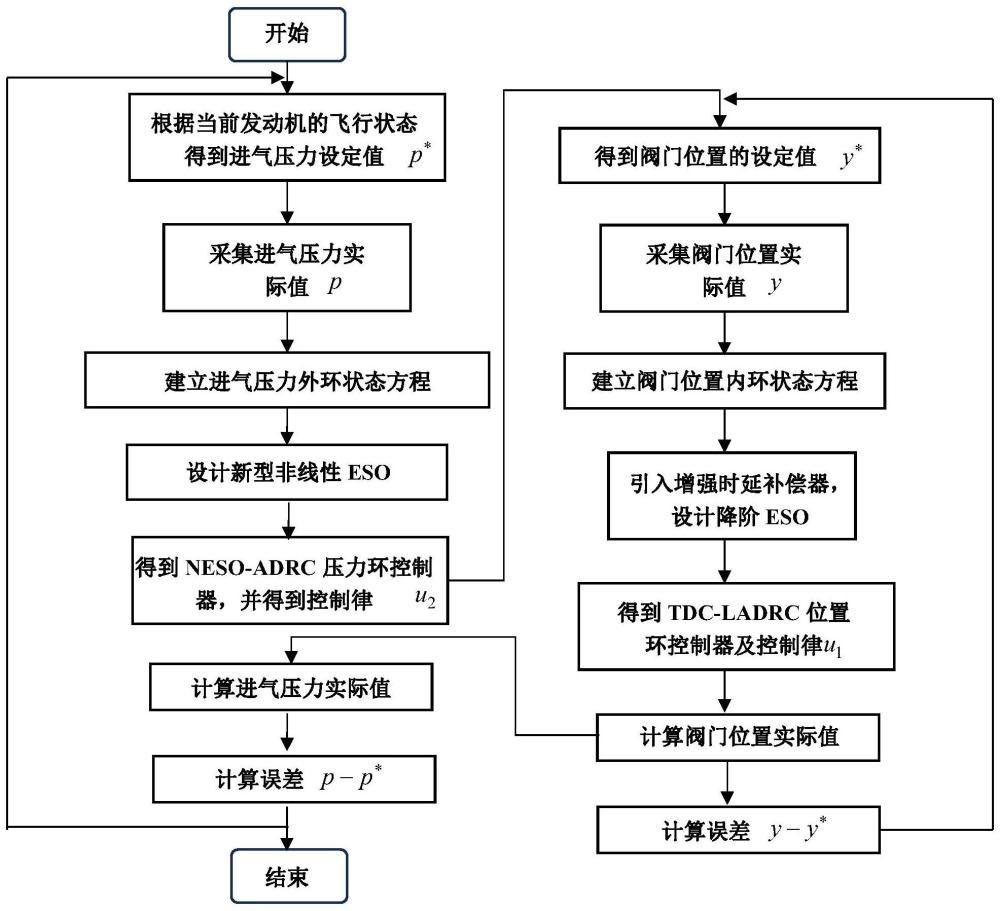
带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法
本发明涉及高空舱进气压力系统控制,具体涉及一种带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法。背景技术:1、航空发动机高空模拟试车台(简称:高空舱)是在地面模拟发动机工......
-

基于扩张状态观测器的光电跟踪系统控制方法及装置
本发明涉及一种基于扩张状态观测器的光电跟踪系统控制方法及装置,属于光电跟踪系统控制。背景技术:1、在运动平台下的光电跟踪系统中,面临更为复杂和剧烈的干扰情况,这给系统设计增加了难度。与此同时,这些干扰......
技术新讯 > 观测器 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01