基于精细干扰观测器的磁浮列车规定性能复合控制方法
- 国知局
- 2024-08-01 00:20:11
本发明涉及列车悬浮系统控制,具体涉及一种基于精细干扰观测器的轨道不平顺工况下的高速磁悬浮列车规定性能固定时间控制方法。
背景技术:
1、高速磁悬浮列车(ems)依靠无接触悬浮导向大大提高了列车运行速度,方便了人们出行,因此成为了各大城市之间的主要交通工具。同时列车的安全性与人们的生活、社会的发展和国家的进步密切相关。如何提高列车的舒适性、便捷性和有效性等性能,是当今一个引起关注的研究方向。
2、磁浮列车运行环境非常复杂,例如轨道曲线变化、轨道不平顺、气动升力、载重变化等,这些不可避免的干扰因素都会降低磁浮列车的悬浮性能。如果列车悬浮性能欠佳,一方面会降低系统的稳定性,导致砸轨砸铁等运行安全问题的发生,另一方面则影响乘客的舒适性。这两大实际问题均是客运交通设计中必须着重考虑的。
技术实现思路
1、本发明的目的在于提供一种基于精细干扰观测器的磁浮列车规定性能复合控制方法,以解决上述背景技术中存在的至少一项技术问题。
2、为了实现上述目的,本发明采取了如下技术方案:
3、第一方面,本发明提供一种基于精细干扰观测器的磁浮列车规定性能复合控制方法,包括:
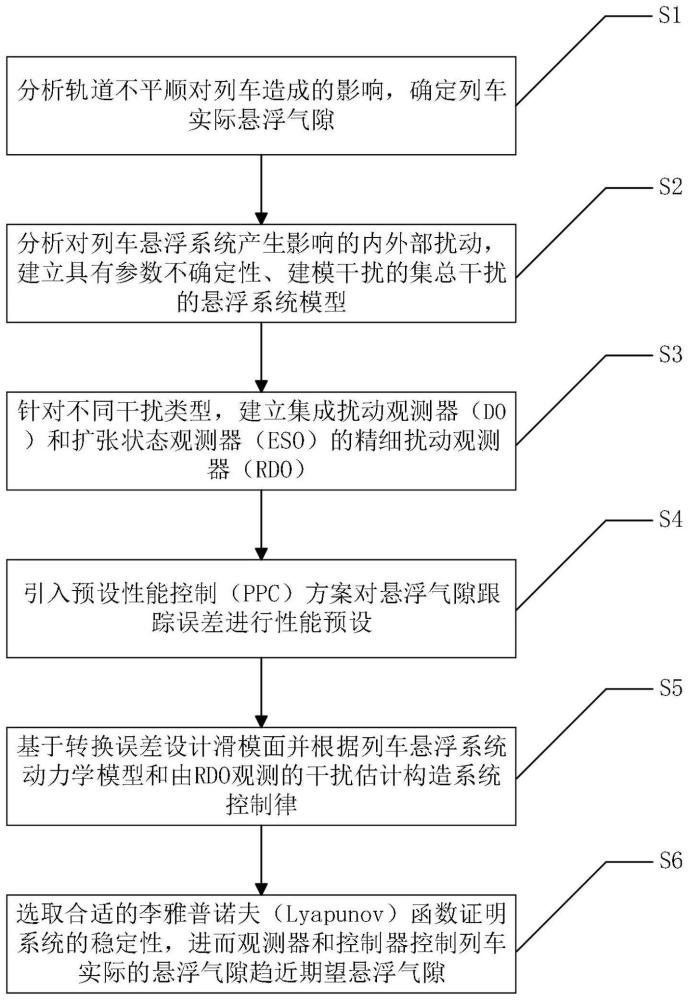
4、根据轨道不平顺对列车造成的影响,确定列车实际悬浮气隙;
5、根据对列车悬浮系统产生影响的内外部扰动,建立具有参数不确定性、建模干扰的集总干扰的悬浮系统模型;
6、针对不同干扰类型,建立集成扰动观测器和扩张状态观测器的精细扰动观测器对干扰进行估计抑制补偿;
7、引入预设性能控制方案对悬浮气隙跟踪误差进行性能预设;
8、基于转换误差设计滑模面并根据列车悬浮系统动力学模型和由精细扰动观测器观测的干扰估计构造系统控制律;
9、选取合适的李雅普诺夫函数证明系统的稳定性,基于系统控制律控制列车实际悬浮气隙趋近期望悬浮气隙。
10、进一步的,基于轨道不平顺的的高速列车悬浮系统动力学模型为:
11、
12、其中,x1为实际悬浮气隙,单悬浮磁铁垂向速度,为轨道不平顺干扰,由于不平顺干扰从非输入通道进入系统,因此d1可视为不匹配干扰,用外生模型描述为为辅助变量,和为已知矩阵参数,为不确定、未知动力学和外部干扰的集总干扰,与不平顺干扰d1不同,集总扰动d2可视为匹配干扰。
13、进一步的,针对不匹配干扰d1干扰设计do:
14、
15、其中,和分别为ξ和d1的估计值,l为待设计的观测器增益,υ为辅助变量;
16、针对匹配干扰d2干扰设计eso:
17、
18、其中,为x2的估计值,e1=x1-xr,和分别为x2和d2的估计值,η1>0和η2>0分别为待设计的eso增益。
19、进一步的,引入预设性能控制方案对悬浮气隙跟踪误差进行性能预设,包括:
20、悬浮气隙跟踪误差定义为e1=x1-xr;其中,xr为参考轨道高度;
21、预设性能函数为θ(t)=(θ0-θ∞)e-γt+θ∞;其中γ>0为收敛速度指标,θ0,θ∞为合理选择的正实数;
22、则跟踪误差性能为:
23、
24、其中r∈(0,1]是对系统响应超调量的约束;
25、构造光滑、严格单调递增的误差转换双射γ(·):(-1,1)→(-∞,∞),采用双曲正切形式的误差转换函数:
26、
27、根据e1(t)=θ(t)γ(ε)以及双曲正切函数的性质,跟踪误差转化为
28、
29、进一步的,设计滑模面参数为:
30、
31、其中,λ1>0,β1>0,0<m1<n1,q1>p1>0;
32、则,控制器为:
33、
34、控制器u包含的结构如下
35、
36、其中,λ2>0,β2>0,0<m2<n2,q2>p2>0。
37、进一步的,构造如下lyapunov函数:
38、
39、分析整理得
40、
41、满足及固定时间收敛定理。
42、第二方面,本发明提供一种基于精细干扰观测器的磁浮列车规定性能复合控制系统,包括:
43、确定模块,用于根据轨道不平顺对列车造成的影响,确定列车实际悬浮气隙;
44、建立模块,用于根据对列车悬浮系统产生影响的内外部扰动,建立具有参数不确定性、建模干扰的集总干扰的悬浮系统模型;
45、补偿模块,用于针对不同干扰类型,建立集成扰动观测器和扩张状态观测器的精细扰动观测器对干扰进行估计抑制补偿;
46、预设模块,用于引入预设性能控制方案对悬浮气隙跟踪误差进行性能预设;
47、构造模块,用于基于转换误差设计滑模面并根据列车悬浮系统动力学模型和由精细扰动观测器观测的干扰估计构造系统控制律;
48、控制模块,用于选取合适的李雅普诺夫函数证明系统的稳定性,基于系统控制律控制列车实际悬浮气隙趋近期望悬浮气隙。
49、第三方面,本发明提供一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如第一方面所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法。
50、第四方面,本发明提供一种计算机设备,包括存储器和处理器,所述处理器和所述存储器相互通信,所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令执行如第一方面所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法。
51、第五方面,本发明提供一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如第一方面所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法的指令。
52、本发明有益效果:有效补偿轨道不平顺对列车悬浮系统的影响;有效衰减具有不确定性、外生干扰的集总扰动对列车悬浮系统的影响;使列车在运行过程中保持稳定的悬浮气隙。
53、本发明附加方面的优点,将在下述的描述部分中更加明显的给出,或通过本发明的实践了解到。
技术特征:1.一种基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,包括:
2.根据权利要求1所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,基于轨道不平顺的的高速列车悬浮系统动力学模型为:
3.根据权利要求2所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,针对不匹配干扰d1干扰设计do:
4.根据权利要求1所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,引入预设性能控制方案对悬浮气隙跟踪误差进行性能预设,包括:
5.根据权利要求4所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,设计滑模面参数为:
6.根据权利要求5所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法,其特征在于,构造如下lyapunov函数:
7.一种基于精细干扰观测器的磁浮列车规定性能复合控制系统,其特征在于,包括:
8.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现如权利要求1-6任一项所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法。
9.一种计算机设备,其特征在于,包括存储器和处理器,所述处理器和所述存储器相互通信,所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令执行如权利要求1-6任一项所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法。
10.一种电子设备,其特征在于,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如权利要求1-6任一项所述的基于精细干扰观测器的磁浮列车规定性能复合控制方法的指令。
技术总结本发明提供一种基于精细干扰观测器的磁浮列车规定性能复合控制方法,属于列车悬浮系统控制技术领域,确定列车实际悬浮气隙;建立悬浮系统模型;针对不同干扰类型,建立集成扰动观测器和扩张状态观测器的精细扰动观测器对干扰进行估计抑制补偿;引入预设性能控制方案对悬浮气隙跟踪误差进行性能预设;基于转换误差设计滑模面并根据列车悬浮系统动力学模型和由精细扰动观测器观测的干扰估计构造系统控制律;选取合适的李雅普诺夫函数证明系统的稳定性,基于系统控制律控制列车实际悬浮气隙趋近期望悬浮气隙。本发明解决了轨道不平顺、具有参数不确定性、建模干扰的集总干扰等对列车运行不平稳的影响。技术研发人员:姚秀明,谢义染,赵搏洋,张丽娜受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200652.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表