一种基于自适应神经网络观测器的网联伺服系统跟踪及同步控制方法
- 国知局
- 2024-08-01 00:19:42
本发明涉及干扰下网联伺服系统的数学模型建立、自适应神经网络观测器设计、自适应神经网络跟踪策略和滑模同步控制策略设计。
背景技术:
1、网联系统具有结构灵活、信息交换方便等优点。近年来,无论是在理论研究还是工程应用中,网联非线性系统都成为了热门研究课题。它被广泛应用于许多实际工程中,例如伺服电机系统、网联车辆、机械臂等。然而,随着网联非线性系统的广泛应用,它也给系统的分析和综合带来了新的挑战。其中一个挑战是未知的非线性函数,这将使得控制系统无法直接集成。另一个挑战是外部干扰,它可能增加系统抖动并由于干扰的存在而破坏系统稳定性。此外,在实践中,几乎所有的物理系统都必须在一定的限制条件下运行,例如电路系统中的额定电压或电路、电机系统中的额定速度等。也就是说,系统的状态将受到一定的约束。如果超出约束条件,可能会导致物理设备的损坏,甚至导致整个系统的崩溃。
技术实现思路
1、本发明要解决的问题是网联伺服系统建模及在外部干扰和未知非线性函数下的跟踪及同步控制问题。
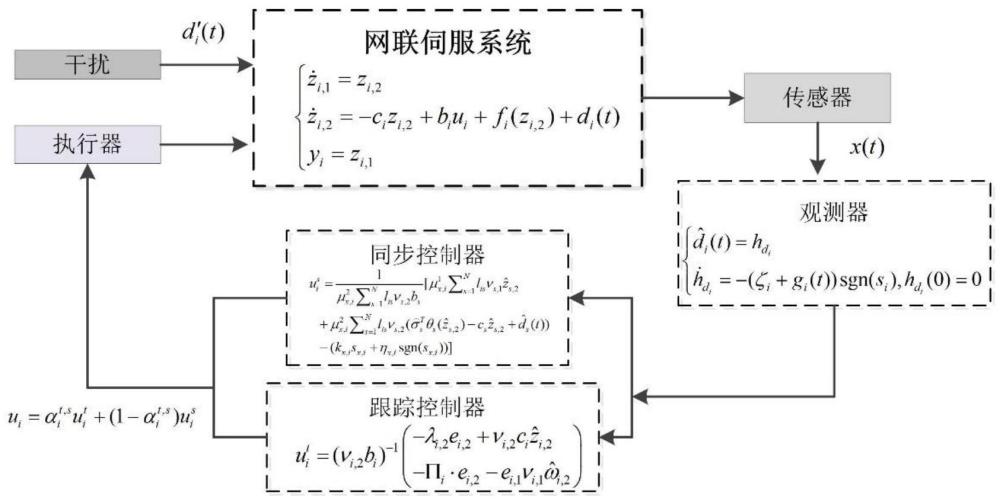
2、本发明解决所述问题采用的算法是,针对外界干扰问题,设计了一种基于神经网络的自适应观测器;针对跟踪和同步控制问题,设计了一种自适应神经网络跟踪策略和滑模同步控制策略。本发明能够有效解决网联伺服系统在外部干扰和未知非线性函数下的跟踪及同步控制问题,保证了系统的稳定性和跟踪精度。
3、所述干扰下网联伺服系统的建模,电机系统的数学模型通常表示为:
4、
5、其中gm,i和gm,i分别表示电机和负载的转动惯量,中的θm,i和θl,i分别为电机和负载的角度位置。qm,i表示电机的粘性摩擦系数,ui是控制输入,ql,i(·)是载的的摩擦力矩,代表齿轮箱的传动力矩,其描述为其中ni,1和ni,2分别是阻尼系数和扭动系数。表示死区非线性函数,并且满足:
6、
7、其中是齿轮间隙的宽度。在此电机系统中,如果不考虑死区非线性,并且,考虑外界扰动那么电机模型可以重写为:
8、
9、其中di′(t)代表外界扰动。
10、定义状态变量zi=[zi,1,zi,2]t,其中输出为y=[y1,...,yn]且yi=zi,1。然后建立的网联非线性电机子系统i(i=1,...,n)的状态空间模型为:
11、
12、其中fi(zi,2)表示非线性动力学变量,di(t)为外部干扰,且ci=bitiqm,i,di(t)=bid′i(t),bi=1/(tigm,i+gl,i),fi(zi,2)=-biql,i(zi,2)。
13、所有的状态都被限制在一个非对称有界区域中:
14、
15、其中和为已知常数,且初始状态zi,1(0)∈d1,zi,1(0)∈d1。
16、所述自适应神经网络观测器设计,定义状态估计误差为:
17、
18、其中是zi,2的估计值。它满足以下表达式:
19、
20、其中是对干扰的估计。可以在有限时间内收敛到0。
21、选择滑模面为:
22、
23、其中设计干扰观测器为:
24、
25、其中gi(t)是观测器增益。给出以下自适应律:
26、
27、其中
28、所述自适应神经网络跟踪策略和滑模同步控制策略设计,同时考虑跟踪和同步问题,控制器设计如下
29、
30、其中为权重参数,且arctan(·)表示反正切函数。
31、且跟踪控制输入、虚拟控制和参数自适应法则为
32、
33、其中如果参数满足1/ξi>1、λi,1>0和λi,2>0。
34、同步控制输入和参数自适应律为
35、
36、其中kx,i>0,kσ,s>0,和
技术特征:1.自适应神经网络观测器的网联伺服系统跟踪及同步控制方法,包括干扰下网联伺服系统的建模、自适应神经网络观测器设计、自适应神经网络跟踪策略和滑模同步控制策略设计。
2.根据权利要求1所述干扰下网联伺服系统的建模,其特征在于:电机系统的数学模型通常表示为:
3.根据权利要求1所述自适应神经网络观测器设计,其特征在于:定义状态估计误差为:
4.根据权利要求1所述自适应神经网络跟踪策略和滑模同步控制策略设计,其特征在于:所述自适应神经网络跟踪策略和滑模同步控制策略设计,同时考虑跟踪和同步问题,控制器设计如下
技术总结本发明涉及干扰下网联伺服系统的数学模型建立、自适应神经网络观测器设计、自适应神经网络跟踪策略和滑模同步控制策略设计。本发明公开了一种基于自适应神经网络观测器的网联伺服系统跟踪及同步控制方法。其技术包括构建干扰下网联伺服系统的数学模型、设计自适应神经网络观测器、设计自适应神经网络跟踪策略和滑模同步控制策略。本发明针对伺服系统中的外界干扰问题,设计了一种基于神经网络的自适应观测器;针对跟踪和同步控制问题,设计了一种自适应神经网络跟踪策略和滑模同步控制策略。本发明能够有效解决网联非线性伺服系统在面对未知非线性函数和外部干扰时的跟踪和同步控制问题,保证了系统的稳定性和跟踪精度。技术研发人员:李猛,杨帆,陈勇,陈章勇受保护的技术使用者:电子科技大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200617.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表