一种基于T-S模糊滑模平衡的双惯性平衡轮独轮车控制方法及系统
- 国知局
- 2024-08-01 00:19:36
本发明涉及,尤其涉及一种基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法及系统。
背景技术:
1、随着机器人技术及自主导航系统的快速发展,独轮车由于其独特的平衡结构和紧凑设计,在城市交通、娱乐和物流等领域显示出广泛的应用前景,特别是在空间受限的场合,其单轮设计提供了在复杂环境下的优异灵活性和机动性。尽管如此,当前该领域的研究与开发活动仍面临众多技术难题,这些难题限制了独轮车机器人在实践中的应用范围及其性能潜力的完全实现。独轮车机器人因其具有体型小、灵活度高等优点而受到机器人研究人员的关注。利用其动态平衡能力,使其能够在复杂的地形中执行运输和救援任务;同时,其细长的造型和灵活的转向功能使其能够在狭窄的空间中进行有效的监测和探索。
2、独轮车机器人在国内的研究尚处于研究性阶段,大多数设计的独轮车的机械设计都是基于飞轮倒立摆、平衡杆的控制形式。例如东南大学提出的”一种可实现自平衡的独轮机器人“的实用新型专利(专利授权号cn202362474u),该机器人能保持侧向平衡和前后平衡,但缺少航向控制机构,很难实现转弯等复杂运动。又例如桂林电子科技大学团队提出的基于陀螺的独轮控制系统”可实现自平衡的陀螺式独轮车机器人系统“的发明专利(专利申请号cn105302148a),利用陀螺具有自稳定特性,不受磁场干扰等优点,可以实现车体侧向和前后双稳定平衡控制,然而,该陀螺机械结构的复杂性导致了高昂的维护成本。国内独轮车的控制方法大多数采用pid控制器对其进行运动控制,例如北京工业大学团队”独轮机器人系统及其控制方法“的发明专利(专利授权号cn101590323b),通过获取到的误差进行既定的pid计算输出pwm可以实现独轮车的车体侧向和前后双稳定平衡控制。
3、现有研究在独轮车的机械结构上往往未能解决复杂性和可维护性问题,多数系统需要专业知识才能进行维护和调试,这在一定程度上阻碍了独轮车机器人技术的普及和应用扩展,同时传统的运动控制算法虽然调试简单,但是不能进行动态调节,导致系统的自适应能力很差,基于上述问题,现有技术需求指向一种既能满足复杂动态环境下稳定性需求,又能兼顾易用性和广泛适用性的控制方法。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。因此,本发明提供了一种基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法解决既能满足复杂动态环境下稳定性需求,又能兼顾易用性和广泛适用性的问题。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明提供了一种基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法,包括:
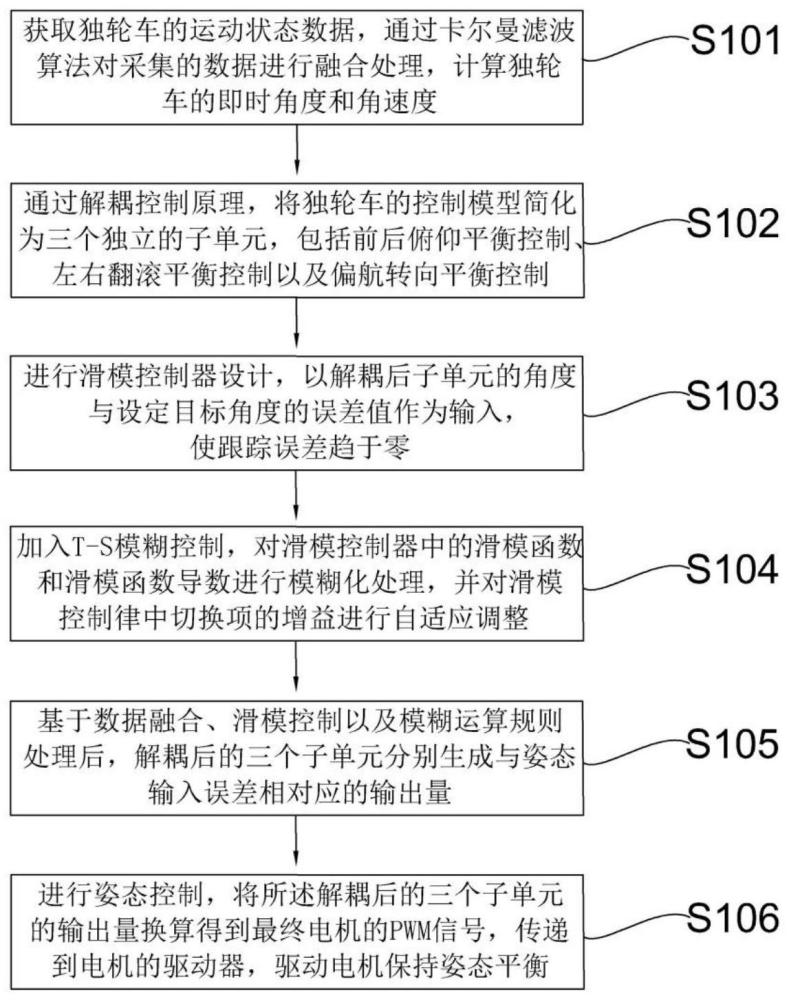
5、获取独轮车的运动状态数据,通过卡尔曼滤波算法对采集的数据进行融合处理,计算独轮车的即时角度和角速度;
6、通过解耦控制原理,将独轮车的控制模型简化为三个独立的子单元,包括前后俯仰平衡控制、左右翻滚平衡控制以及偏航转向平衡控制;
7、进行滑模控制器设计,以解耦后子单元的角度与设定目标角度的误差值作为输入,使跟踪误差趋于零;
8、加入t-s模糊控制,对滑模控制器中的滑模函数和滑模函数导数进行模糊化处理,并对滑模控制律中切换项的增益进行自适应调整;
9、基于所述数据融合、滑模控制以及模糊运算规则处理后,解耦后的三个子单元分别生成与姿态输入误差相对应的输出量;
10、进行姿态控制,将所述解耦后的三个子单元的输出量换算得到最终电机的pwm信号,传递到电机的驱动器,驱动电机保持姿态平衡
11、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:所述融合处理包括:
12、在每个运动控制周期内,运动控制器采集反馈信号,并通过卡尔曼滤波算法进行处理,得到适用控制周期内的反馈信号,将所述处理后的反馈信号与预设的零位值进行比较,确定角度、角速度以及加速度误差信号;
13、根据采集的反馈信号,计算行进的实际转速,并将所述实际转速与运动控制器的目标转速信号进行比较,确定速度误差信号。
14、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:所述简化为子单元包括:
15、运动控制器将获取的前后俯仰倾角以及前后俯仰角速度信号,分解至机器人的前后俯仰自由度方向;
16、将获取的左右翻滚倾角以及左右翻滚角速度信号,分解到机器人的左右翻滚自由度方向;
17、将获取的偏航倾角以及偏航角速度信号,分解到机器人的偏航自由度方向。
18、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:所述滑模控制器设计包括:
19、独轮车动态的状态方程表示为:
20、
21、其中,a、b表示独轮车状态方程的系数,u表示独轮车电机的力矩输入,f(t)表示系统模型误差以及外部干扰,设上界为λf,即|f(t)|≤λf,x表示状态变量的矩阵集合;
22、定义滑模函数,表示为:
23、s=btpx
24、其中,p∈r4×4是正定矩阵,x表示状态变量距离理想值的误差;
25、控制输入包括滑模段以及到达段,所述滑模段包括,当状态变量到达滑模面,此时以及f(t)=0,使x将趋于0,表示为:
26、
27、其中,为时间对滑模函数s的导数,表示滑模函数随时间的变化率,bt表示矩阵b的转置;
28、所述到达段包括,当|f(t)|≤λf,且时,系统达到滑模稳定面,设计控制律,使模糊控制进入滑模面时和s=0,表示为:
29、u=ueq+un
30、其中,ueq是等效控制,un为切换控制,由滑模控制的指数趋近律:可得
31、ueq=-(btpb)-1btpax(t)
32、un=-(btpb)-1[|btpb|λf+ε·sgn(s)+ks]
33、其中,k是控制律里的切换项增益,x(t)表示系统的状态变量与设定目标值之间在t时的误差,ε表示设计参数,sgn(s)是符号函数。
34、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:构造lyapunov函数,表示为:
35、v=xtpx
36、对所述lyapunov函数求导,当lyapunov函数的导数即状态变量x→0,同时求解p矩阵,表示为:
37、
38、
39、ax+xat<bl+lbt
40、其中,
41、求解线性矩阵不等式,得到p矩阵使跟踪误差趋于零。
42、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:所述t-s模糊控制包括,
43、所述滑模控制器中的滑模函数s和滑模函数的一阶导数作为模糊控制的输入,所述控制律的切换项增益k作为输出变量;
44、其中,设计所述滑模函数s以及滑模函数的一阶导数相应的模糊论域在[-3,3]上,减少模糊规则数量,简化控制器,模糊子集表示为:
45、e={n,z,p}
46、ec={n,z,p}
47、其中,e、ec分别对应所述滑模函数s和滑模函数的一阶导数的a,n表示负数,z表示零,p表示正数;
48、在所述论域两端使用三角形隶属度函数,在趋近于零的位置使用梯形函数;
49、令ri表示t-s模糊控制的第i条规则,表示为:
50、ri:if y(t)isand...andy(n-1)isand u(t)isand...and u(m-1) is
51、then:
52、其中,表示第一个语言变量的隶属度函数,bmi表示第二个语言变量的隶属度函数,yi(n)(t)为系统输出,ani,bmi表示两个语言变量分别属于ani,bmi的隶属度函数值;
53、构建模糊规则,表示为:
54、r1:if e is n and ec is n then u=-2.5*(e*ec)-0.5
55、r2:if e is n and ec is p then u=0.9*(e*ec)-0.2
56、r3:if e is p and ec is n then u=0.9*(e*ec)-0.2
57、r4:if e is z and ec is z then u=0.08*(e*ec)
58、r5:if e is z and ec is p then u=0.16*(e*ec)
59、r6:if e is z and ec is n then u=0.16*(e*ec)
60、r7:if e is p and ec is z then u=0.16*(e*ec)
61、r8:if e is n and ec is z then u=0.16*(e*ec)
62、r9:if e is p and ec is p then u=2.5*(e*ec)+0.5
63、所述t-s模糊控制的输出表示为:
64、
65、其中,ωi是第i条模糊规则的适用度,表示为:
66、
67、其中,y(p-1)(t)、u(q-1)(t)表示前件,表示第i条模糊规则前件中两个语言变量的隶属度函数值。
68、作为本发明所述的基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的一种优选方案,其中:生成所述输出量包括:
69、基于所述子单元分解的姿态角,包括仰俯角、横滚角以及偏航角,作为姿态反馈值,与设定的角度进行比较,得到误差值;
70、基于所述滑模控制以及t-s模糊控制,获取t-s模糊处理后的切换项增益,通过计算得到各个子单元最终的输出量。
71、第二方面,本发明提供了一种基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制系统,包括,
72、采集处理模块,用于获取独轮车的运动状态数据,通过卡尔曼滤波算法对采集的数据进行融合处理,计算独轮车的即时角度和角速度;
73、简化模块,用于通过解耦控制原理,将独轮车的控制模型简化为三个独立的子单元,包括前后俯仰平衡控制、左右翻滚平衡控制以及偏航转向平衡控制;
74、滑模控制器模块,用于进行滑模控制器设计,以解耦后子单元的角度与设定目标角度的误差值作为输入,使跟踪误差趋于零;
75、模糊控制模块,用于加入t-s模糊控制,对滑模控制器中的滑模函数和滑模函数导数进行模糊化处理,并对滑模控制律中切换项的增益进行自适应调整;
76、输出模块,用于基于所述数据融合、滑模控制以及模糊运算规则处理后,解耦后的三个子单元分别生成与姿态输入误差相对应的输出量;
77、姿态控制模块,用于进行姿态控制,将解耦后的三个子单元的输出量换算得到最终电机的pwm信号,传递到电机的驱动器,驱动电机保持姿态平衡。
78、第三方面,本发明提供了一种电子设备,包括:
79、存储器和处理器;
80、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现所述基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的步骤。
81、第四方面,本发明提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述基于t-s模糊滑模平衡的双惯性平衡轮独轮车控制方法的步骤。
82、与现有技术相比,本发明的有益效果:本发明通过采用t-s模糊滑模平衡控制方法,能够有效地解耦控制系统,使得独轮车在前后俯仰平衡、左右翻滚平衡以及偏航转向平衡方面都能够更加稳定地保持姿态,姿态稳定性得到提高;通过对滑模控制器中的滑模函数和滑模函数导数进行模糊化处理,以及对滑模控制律中切换项的增益进行自适应调整,可以提高系统对姿态变化的动态响应性,使得系统更加灵活、快速地响应外部干扰或指令变化;滑模控制器的设计使得系统具有较强的抗干扰能力,能够有效地抵抗外部干扰对系统姿态的影响,从而提高了系统的稳定性和可靠性;通过模糊运算规则处理和自适应调整,系统能够根据实际运行状态和环境条件自动调整控制参数,使得控制系统具有更强的适应性和鲁棒性,同时能够提高数据的准确性和精确度,进一步提升了控制精度,响应速度快,稳态误差小,具有较好的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200604.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表