基于改进DBO算法的无人机路径规划方法、系统及存储介质与流程
- 国知局
- 2024-08-01 00:19:35
本发明属于无人机,特别是涉及基于改进dbo算法的无人机路径规划方法、系统及存储介质。
背景技术:
1、近年来,无人机产业发展不断加快,逐渐从军用领域延伸到了民用领域,无人机的应用场景中通常需要进行无人机路径规划。由于采用群智能算法进行无人机路径规划的用时和路径代价较小,因此得到广泛使用,例如蜂群算法、蚁群算法、蜣螂算法等。其中蜣螂算法作为模拟蜣螂行为的启发式优化算法,具备全局探索和局部开发的能力以及在收敛速度方面表现出色,用于无人机路径规划中具有用时短的优点。
2、但是目前蜣螂算法用于无人机规划仅是基于简单障碍物构建的地图模型以及简单的山脉模型,对无人机的避障要求较低;同时现有的蜣螂算法存在收敛精度低、全局搜索能力较弱以及易陷入局部最优解的缺陷,这种缺陷会导致算法在解决复杂问题时缺乏全面性和鲁棒性。因此,当面对现实世界存在复杂性建筑等综合障碍物的环境时,基于现有蜣螂算法进行无人机路径规划的准确性低、用时长、路径代价大,不能满足无人机快速、精准、安全运行的要求。
3、为了解决当前基于蜣螂算法进行无人机路径规划的准确性低、用时长、路径代价大的问题,提出一种基于改进dbo算法的无人机路径规划方法、系统及存储介质。
技术实现思路
1、本发明实施例提出一种基于改进dbo算法的无人机路径规划方法、系统及存储介质,以至少解决当前基于蜣螂算法进行无人机路径规划的准确性低、用时长、路径代价大的问题。
2、根据本发明的一个实施例,提供了一种基于改进dbo算法的无人机路径规划方法,包括:
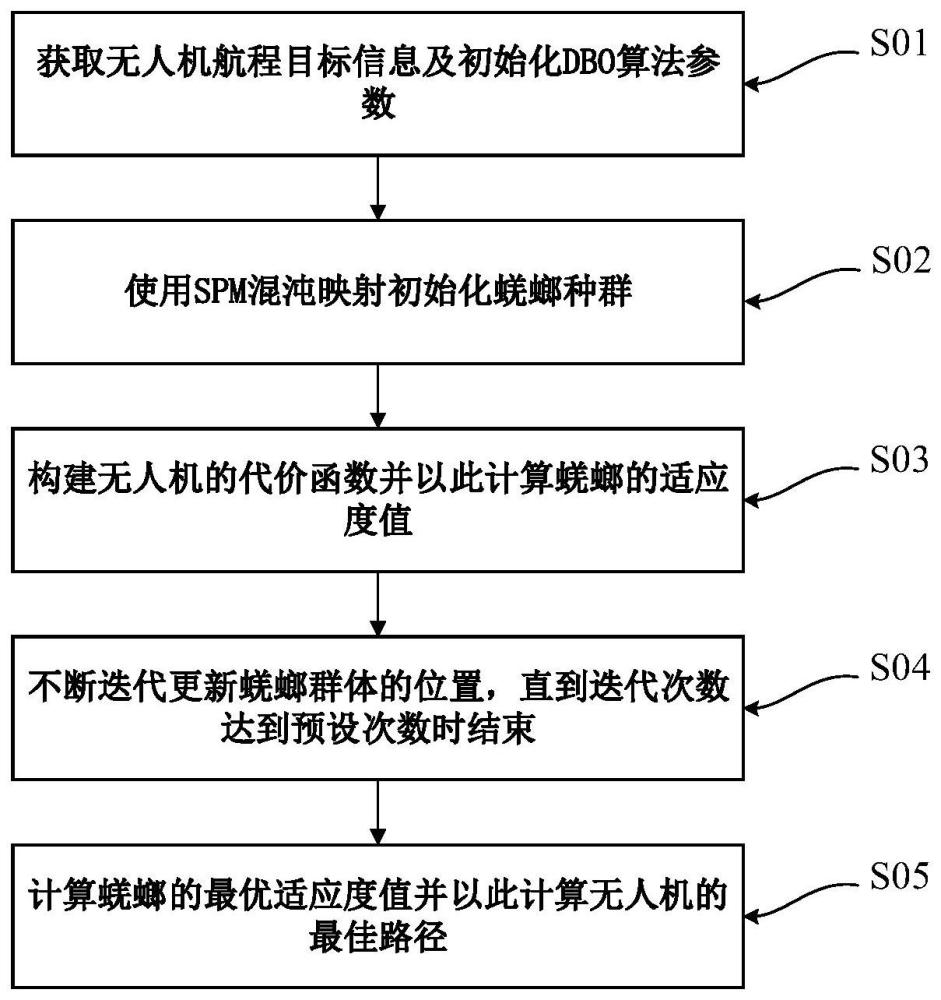
3、获取无人机航程目标信息及初始化dbo算法参数;
4、使用spm混沌映射初始化蜣螂种群;
5、构建无人机的代价函数并以此计算蜣螂的适应度值;
6、不断迭代更新蜣螂群体的位置,直到迭代次数达到预设次数时结束;
7、计算蜣螂的最优适应度值并以此计算无人机的最佳路径。
8、在一个示例性实施例中,所述无人机航程目标信息包括无人机航程起点位置和无人机航程终点位置;所述初始化dbo算法参数包括初始化dbo算法的寻优上下边界、种群数、最大迭代次数和选择维度。
9、在一个示例性实施例中,所述构建无人机的代价函数并以此计算蜣螂的适应度值,包括步骤:
10、根据路径的航程代价和/或路径的高度代价和/或路径的平滑度代价和/或路径的威胁代价计算无人机的代价函数;
11、根据蜣螂路径数据和无人机的代价函数计算蜣螂的适应度值。
12、在一个示例性实施例中,所述更新蜣螂群体的位置,包括步骤:
13、采用全局勘探策略更新滚球蜣螂位置;
14、计算繁殖蜣螂的产卵区域及其位置;
15、采用边界选择策略与自适应t分布扰动策略更新觅食蜣螂位置;
16、采用动态权重因子策略更新盗窃蜣螂位置;
17、对蜣螂进行越界校正。
18、在一个示例性实施例中,所述采用全局勘探策略更新滚球蜣螂位置,包括步骤:
19、配置随机数;
20、若随机数小于预设值,则使用鱼鹰优化算法全局勘探策略公式更新滚球蜣螂位置;
21、若随机数大于或等于预设值,则使用高斯分布随机角度策略公式更新滚球蜣螂位置。
22、在一个示例性实施例中,所述计算繁殖蜣螂的产卵区域及其位置信息,包括步骤:
23、采用边界选择策略模拟雌性蜣螂产卵的区域;
24、根据产卵区域的边界计算繁殖蜣螂的最优产卵区域及育雏球的位置信息。
25、在一个示例性实施例中,所述采用边界选择策略与自适应t分布扰动策略更新觅食蜣螂位置,包括步骤:
26、配置随机数;
27、若随机数大于预设值,则采用边界选择策略更新觅食蜣螂位置;
28、若随机数小于或等于预设值,则采用自适应t分布扰动策略更新觅食蜣螂位置。
29、在一个示例性实施例中,所述采用自适应t分布扰动策略更新觅食蜣螂位置,包括:
30、计算t分布的自由度参数;
31、根据觅食蜣螂变异扰动前的位置和服从自由度参数的t分布的随机数更新觅食蟑螂位置。
32、在一个示例性实施例中,所述采用动态权重因子策略更新盗窃蜣螂位置,包括步骤:
33、计算基于迭代次数的动态权重因子;
34、根据动态权重因子和其他类型蜣螂的位置更新盗窃蜣螂位置;
35、在一个示例性实施例中,所述对蜣螂进行越界校正是根据优化问题的下界和上界对蜣螂位置进行取模运算使得蜣螂位置在合理的范围内。
36、在一个示例性实施例中,所述计算蜣螂的最优适应度值并以此计算无人机的最佳路径,包括:
37、计算每次迭代中每只蜣螂的适应度值并计算蜣螂的最优适应度值;
38、根据最优适应度值对应蜣螂的位置轨迹计算最优蜣螂轨迹;
39、根据无人机航程起点位置和无人机航程终点位置及最优蜣螂轨迹计算无人机的最佳路径。
40、根据本发明的又一个实施例,还提供了一种计算机可读存储介质,其存储用于电子数据交换的计算机程序,其中,所述计算机程序使计算机执行上述方法。
41、根据本发明的又一个实施例,还提供了一种基于改进dbo算法的无人机路径规划系统,包括:
42、无人机;
43、处理器;
44、存储器;
45、以及
46、一个或多个程序,其中所述一个或多个程序被存储在存储器中,并且被配置成由所述处理器和/或无人机执行,所述程序使计算机执行上述方法。
47、本发明的基于改进dbo算法的无人机路径规划方法、系统及存储介质具有的优点是:
48、(1)在原始蜣螂算法的基础上使用分布更均匀的spm混沌映射初始化蜣螂种群,相比传统的蜣螂算法模型,可以有效提高蜣螂种群发布的均匀性,提高蜣螂算法的全局搜索能力和适应性。
49、(2)根据路径的航程代价和/或路径的高度代价和/或路径的平滑度代价和/或路径的威胁代价计算无人机的代价函数并根据蜣螂路径数据和无人机的代价函数计算蜣螂的适应度值,相比传统的无人机规划算法,可以有效评估无人机路径的优劣,便于通过蜣螂种群的活动模拟出综合代价最低的最优无人机路径。
50、(3)结合鱼鹰优化算法的全局勘探策略与高斯分布随机角度策略更新滚球蜣螂的位置,相比传统的蜣螂算法模型,可以有效增强算法的全局搜索能力,避免出现局部最优,从而提高算法的准确性。
51、(4)结合边界选择策略与自适应t分布扰动策略更新觅食蜣螂位置,相比传统的蜣螂算法模型,可以有效增加搜索过程中的随机性,使得算法在搜索空间中具有更好的全局规划和逃离局部最优的能力,从而提高算法的优化性能。
52、(5)采用基于迭代次数的动态权重因子策略更新盗窃蜣螂位置,相比传统的蜣螂算法模型,可以有效增加算法收敛速度,有效缩减无人机路径规划用时。
53、(6)根据最优适应度值对应蜣螂的位置轨迹计算最优蜣螂轨迹并根据无人机航程起点位置和无人机航程终点位置及最优蜣螂轨迹计算无人机的最佳路径,相比传统的无人机路径规划方法,可以有效寻找代价最低的最优无人机路径,提高路径规划的准确性并减少路径规划时间。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。