一种扰动状态下发动机组的非周期间歇控制
- 国知局
- 2024-08-01 00:19:19
本发明涉及一种非周期间歇控制方法,具体涉及一种扰动状态下发动机组的非周期间歇控制。
背景技术:
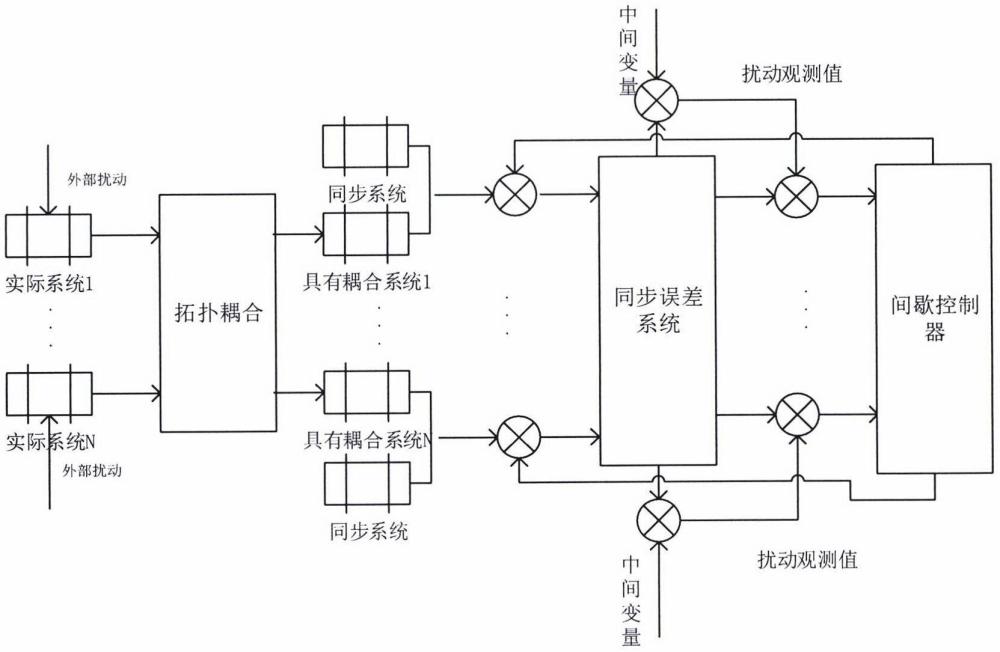
1、发动机组的间歇性控制方法,可以有效的降低燃料消耗并提升其性能;通过事件依赖去实现其非周期间歇控制方法较传统的时间依赖方法非周期间歇控制方法相比,其控制效率更高,响应更快。考虑现实生产过程中存在各式各样的扰动,且发动机组之间的相互影响,可以利用复杂网络,控制理论,数学等相关学科对发动机组进行建模从而分析其工作状态。
2、因此对于发动机组非周期间歇控制策略的讨论,对于发动机组的使用至关重要。基于这个思想,研究人员对连续时间发动机非周期间歇控制策略的同步性展开了大量的研究,并取得一系列成果。
技术实现思路
1、本发明的目的是提出一种扰动状态下发动机组的非周期间歇控制,可有效提高发动机组控制系统的性能。
2、一种扰动状态下发动机组的非周期间歇控制,其特征在于,依赖于事件实现发动机组的一个非周期间歇控制。在本发明中,包括以下步骤:
3、考虑到实际环境中存在的干扰,建立具有外部扰动的发动机组系统动力学模型;
4、针对未知但有界的输出通道扰动,设计一种扰动观测器,实时观测其扰动并输出。
5、对于其外界非匹配扰动,采用h∞控制方法进行处理。
6、设计一个分段控制器,分别作用在lyapunov-krasovskii泛函和其中在r1区域内控制器包含同步误差反馈和观测扰动状态补偿,r2区域内控制器为0,r3区域内控制器保持前一时刻状态。
7、结合先前步骤,借助lyapunov稳定性定理、矩阵不等式等,得出扰动状态下的发动机组的非周期间歇控制同步判据,进而达到同步状态;
8、在外部扰动下,对于参考文献[1]中的发动机组系统模型,建立如下的动力学模型:
9、
10、g(x)=1.5tanh(x).
11、
12、
13、其中xi(t)为第i个子系统状态变量,f(x)表示激活函数,ui(t)表示控制输入,lij,γ表示耦合矩阵和内耦合矩阵,di(t)表示在第i个输入通道中的扰动,ωi(t)表示附加扰动并假定为平方可积函数,a,bg,b,bw为已知参数矩阵。
14、控制通道中的扰动是由外生系统产生,外生系统的模型如下:
15、
16、
17、w4(t)=0.1sin(0.2t).
18、η1(t)=3e-0.5tsin(3t),ω4(t)=sin(t).
19、其中δi(t)为第i个系统状态变量,ηi(t)表示第i个系统上外生信号所引起的扰动,并假设为平方可积函数,ad,bd,cd为已知参数矩阵。
20、定义同步误差exi(t)=xi(t)-y(t),就可以得到同步误差系统状态方程:
21、
22、其中g(exi(t))=g(xi(t))-g(y(t)).
23、针对其输入通道内的扰动设计一款扰动观测器,扰动观测器结构如下:
24、
25、其中λi(t)为中间变量,的观测值,的观测值;
26、定义扰动误差可以得到扰动误差系统状态方程;
27、
28、对于其同步误差和扰动误差,借助于kronecker积,可以进一步写成:
29、
30、其中ex(t)=col{ex1(t),ex2(t),…,exn(t)},eδ(t)=col{eδ1(t),eδ2(t),…,eδn(t)},g(ex(t))=col{g(ex1(t)),g(ex2(t)),…,g(exn(t))},zi(t)表示为测量输出。
31、设计一个分段控制器
32、
33、
34、
35、
36、
37、其中且
38、设计控制方案,保证系统实现同步,证明过程如下:
39、c001:对于v(t)∈r1(t)区间内,其控制器为构造以下形式的能量函数:
40、
41、c002:其中,p1,p2为任意正定矩阵;
42、c003:计算v(t)的一阶导数:
43、
44、c004:利用lipschitz条件和矩阵不等式方式,进一步可得:
45、c005:
46、c006:该控制方案可以保证系统一致有界稳定,证明过程如下:
47、c007:利用h∞性能处理非匹配扰动w(t)和η(t),即其中z(t)为测量输出。可得:
48、c008∶
49、
50、c009:其中,
51、
52、
53、
54、
55、
56、
57、ω1,2=δ1,2,ω1,3=δ1,3,ω2,2=δ2,2,ω2,3=δ2,3,ω2,4=δ2,4
58、
59、c010:基于lyapunov稳定性理论知,当δ≤0,有即。那么在v(t)∈r1(t)区间内,系统最终可以实现指数同步且扰动可以被估计。
60、c011:对于v(t)∈r2(t)∪r3(t)区间内,由权利要求4可知。在该区域内满足当t→∞时,v(t)→0,故在此区间内也可实现同步。
61、c012:下面考虑初始时刻状态,分为y(t0)∈r1(t)和v(t0)∈r2(t)∪r3(t)两种情况下考虑。
62、c013:当v(t0)∈r1(t)时,控制器正常作用,由b007可知其中α1>α2,λ>β2>β1,故在v(t)∈r1(y)时的指数衰减率大于b1(t),使得v(t)会与b1(t)接触进入r2(t)∪r3(t)区域内,令该时刻为t1。
63、c014:可以得出:
64、
65、c015:当t→∞时,v(t)→0,可实现同步。
66、c016:当v(t0)∈r2(t)∪r3(t)时,ui(t)=0,在控制器不作用的情况下能量函数将向上反弹,在与b1(t)边界接触后,控制器实现更新,使得能量函数下降,如此往复直至v(t)→0,故能量函数只在r2(t)∪r3(t)区间波动,有:
67、c017:
68、c018:当t→∞时,v(t)→0,可实现同步。
69、c019:证毕,故系统所设计的非周期间歇控制策略下,可以实现同步。
技术特征:1.一种扰动状态下发动机组的非周期间歇控制。其特征在于,依赖于事件实现发动机组的一个非周期间歇控制。在本发明中,包括以下步骤:
2.根据权利要求1所述的基于非周期间歇控制的发动机组控制系统新判据,其特征在于外部扰动下,建立发动机控制系统模型,具体步骤如下:
3.根据权利要求2所述的发动机组动力学系统和外生扰动系统,针对其输入通道内的扰动设计一款扰动观测器,扰动观测器结构如下:
4.根据权利要求2和3所述的系统模型和观测器模型,设计一个分段控制器
5.根据权利要求2,3,4所述的扰动状态下发动机组的非周期间歇控制系统,设计控制方案,保证系统实现同步,证明过程如下:
技术总结本发明公开了一种扰动状态下发动机组的非周期间歇控制。设计一个依赖于事件的间歇控制器,此外,对于其输入通道的扰动采用扰动观测器实现估计,并在控制器里实施补偿,外部扰动采用采用H∞控制方法进行处理,只有当Lyapunov‑Krasovskii泛函的轨迹运行到预设的工作区域控制器才作用。在所提出的间歇控制框架下,利用Lyapunov理论和矩阵不等式,给出了一个简单的保证系统同步的充分条件。保证误差系统的最终一致有界,以实现误差系统的同步。技术研发人员:沈谋全,魏勇受保护的技术使用者:南京工业大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200586.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表