带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法
- 国知局
- 2024-07-31 23:42:59
本发明涉及高空舱进气压力系统控制,具体涉及一种带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法。
背景技术:
1、航空发动机高空模拟试车台(简称:高空舱)是在地面模拟发动机工作环境,获取发动机高空性能的大型试验设备,是自主研制先进航空发动机的必不可少的环节。高空舱的主要构成系统包括:气源系统、进排气系统以及抽气系统。其中,进气压力系统是高空舱的重要构成部分,为航空发动机高空飞行速度模拟提供稳定的气源需求。因此,进气压力系统控制性能将直接影响对航空发动机的功能和性能评定的有效性。
2、高空舱进气压力系统其结构及组成复杂,具有非线性程度高、不确定性强及未知扰动众多等显著特点。除此以外,由于进气压力系统的控制是通过大型液压伺服系统调节气体流量来实现的,而由于调节阀中间位置弹簧的预压缩和液压缸活塞中的摩擦特性导致输出信号中包含纯时滞环节。同时航空发动机试验环境条件严苛存在强量测噪声。上述因素使得进气压力系统精确控制存在极大的挑战性。
3、由于不依赖于精确的数学模型,且结构简单与应用成本低,传统的pid或pi控制,是高空舱进气压力系统的最为常用的控制方法。考虑到进气压力系统实际控制中包含强空气流量扰动、伺服系统的时延以及量测噪声等大量不确定性,导致上述以pid控制为核心的控制策略是显然难以满足现代先进航空发动机试验进气压力系统中更快响应、强抗扰动性和高精度的控制需求。近年来,自抗扰控制作为一种有效的主动抗干扰控制技术,不仅具有较强抗干扰能力,且继承了pid控制的许多优点例如:不依赖于模型与结构简单等。利用状态观测的思想,将影响控制性能的系统内外扰动归结为总扰动,并将总扰动扩张为一个新的系统状态量通过自抗扰控制的核心扰动观测环节扩张状态观测器(extended stateobserver,eso)进行实时观测并通过前馈补偿抵消扰动影响。考虑到eso的实用性且满足分离设计原理,通常被单独提出与成熟的负反馈控制器结合,形成基于eso的复合控制策略。尤其,基于线性eso的比例微分(pd)控制,即线性adrc控制策略,作为一种二自由度控制既保留了简单的控制结构,参数整定方便且具有强抗扰性以及不依赖于精确数学模型等特点而被成功的应用到高空舱进气压力系统中。
4、文献(钱秋朦,但志宏,张松等.航空发动机过渡态试验进气压力线性自抗扰控制方法[j].航空动力学报,2019,34(10):2271-2279.)和文献(但志宏,张松,白克强等.基于扩张状态观测器的高空台进气环境模拟控制技术研究[j].推进技术,2021,42(09):2119-2128.)将传统线性自抗扰控制技术成功应用到进气压力系统中,提高了进气压力系统的稳定性和抗干扰能力。文献(张松,白克强,但志宏等.基于eso的高空台发动机进气压力控制研究进展[j].科技导报,2021,39(11):109-117.)在此基础上详细比较与总结了基础自抗扰控制与其他各类控制方法的性能情况。为了进一步提高高空舱进气压力系统的控制性能,文献(但志宏,张松,张和洪等.高空舱飞行高度模拟串级ladrc鲁棒控制技术.航空动力学报:2023,1-9)将高空舱进气压力系统的模型建立为两个一阶典型惯性系统,等效为一个双回路控制环。具体的包含了调节阀位置内环和压力外环,并将传统线性自抗扰控制应用到两个回路中。但是该方法虽然相较于上述的单环pid控制或单环自抗扰控制,进气压力控制性能得到改善。当在研究推进的过程中,位置内环中大型液压阀门存在的输出信号时滞问题和压力外环的大型快速的空气流量扰动,基于线性自抗扰控制的串级控制方法在处理存在的时滞和强扰动时是困难的,无法较大的改善系统控制性能。
5、现有技术存在问题:
6、(1)在高空舱进气压力系统调节阀位置内环的输出信号存在时滞,会使得内环自抗扰控制中,扩张状态观测器的观测误差增大导致系统的振荡甚至发散。因此有效的时滞补偿是保证位置内环控制性能的关键。
7、(2)在时滞补偿方法中,smith预估器由于结构简单易实现而被广泛应用。其中,预估器补偿原理是输出信号的微分信号的获取。但由于航空发动机测试的严苛环境,高空舱进气压力系统存在全频段随机噪声,使得系统输出信号中包含强量测噪声。因此,传统的时滞补偿微分信号获取,例如小惯性环节和惯性环节相减获取微分信号的方式不在适用。在强量测噪声下,获取准确的输出信号微分信息,是设计有效的时延补偿器的关键。
8、(3)在高空舱进气压力系统压力外环中,由于航空发动机的瞬态试验,快速且剧烈的状态变化导致的发动机进气流量的大幅度和瞬时的变化,传统的线性eso无法有效处理,需要具有更强观测性能的新型eso来更加实时准确的估计压力外环总扰动,提高外环控制器的抗干扰性能,以获得精确的压力控制。
技术实现思路
1、本发明的目的在于解决上述现有技术存在问题,提供一种带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法,其是针对高空舱进气压力系统位置内环时滞以及压力外环强扰动,基于增强时滞补偿和新型非线性eso的串级自抗扰控制方法。
2、为实现上述目的,本发明的技术方案是:一种带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制方法,包括:
3、步骤1、将高空舱进气压力系统模型等效为位置内环模型与压力外环模型,并依据系统特性分别建立带时滞环节的位置内环模型与带扰动的压力外环模型,得到系统传递函数并转化为状态空间方程;
4、步骤2、针对时滞的位置内环模型,引入增强时滞补偿环节,并设计一种带时滞补偿的自抗扰控制,保证进气压力系统位置内环的光滑小超调的跟踪性能;
5、步骤3、针对进气压力系统中存在的强测量噪声,传统的微分器无法获得准确的微分信号,因此提出一种基于增强离散最优控制算法即fast算法的跟踪微分器来获得精确的微分信号,并基于该微分信号设计增强时滞补偿器,更好的补偿带时滞的输出信号,抑制时滞对控制性能的影响;
6、步骤4、针对压力外环中的强流量扰动,基于一个新误差反馈增益函数设计非线性eso,与传统eso的反馈增益函数特性相比较,由于该函数具有“小误差时更大的增益,大误差时更小增益”的特性从而使得新设计的非线性eso具有更准确的扰动观测性能。因此,基于该非线性eso的自抗扰控制改善压力外环的抗扰性能;同时结合带增强时滞补偿的位置内环自抗扰控制和基于新型非线性eso的压力外环自抗扰控制,形成带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制有效的处理系统中存在的时滞和强扰动问题,提升进气压力控制性能。
7、在本发明一实施例中,步骤1中,位置内环模型被近似为一个小惯性环节,考虑时滞环节,其具体的传递函数如下:
8、
9、其中,km为内环比例增益值,tm为内环时间常数,s为拉普拉斯变量,τ为时滞常数;对应微分方程形式为:
10、
11、其中,x1,为内环系统状态量,y为内环系统输出信号,y1包含时滞τ的内环输出信号,t为当前时间,u1控制输入信号。其中,内环比例增益值km、内环时间常数tm与时滞常数τ的准确数值在多数情况下无法得到,表现为参数的不确定性;未建模动态摩擦力和外部未知扰动d1是阀门位置内环模型中存在的另一个关键问题;将涉及的不确定性、未建模动态以及外部未知扰动归结到总扰动f1中,得式(3):
12、
13、其中,b01为位置内环模型实际控制增益b1的估值。d1为外部扰动。
14、在本发明一实施例中,步骤1中,高空舱进气压力系统模型本质上能够被等效为一个单入单出的容腔结构,进气压力微分方程如下:
15、
16、其中,p,t,v,r分别为容腔内气体压力、气体温度、气体体积和气体常数;hg为气体比焓;cp为气体比定压热容;hin,hout分别为流入气体比焓和流出气体比焓。其中,流入气体流量win为调节阀流量特性模型,其简化方程为:
17、
18、其中,α、ρ1、pin分别为阀门等效截面积、流入气体密度、阀门的流量系数以及流入气体压力;被试航空发动机需求气体流量wout表示为:
19、
20、其中,wahs为被试航空发动机的换算气体流量;η为关于被试航空发动机的风扇换算转速;由此,式(4)改写为:
21、
22、其中,外环比例增益k=α/u2,u2为进气压力外环模型控制输入;外环时间常数进气压力被控模型写为:
23、
24、其中,x2,为外环系统状态量,y2为外环系统输出信号,由于进气压力外环模型控制输入u2与实际控制之间存在结合式(2)和(9),并考虑压力外环模型的内外扰动因素得:
25、
26、其中,为外环系统,外环总扰动外环模型实际控制增益d2为压力外环模型的外部扰动,b02为压力外环模型实际控制增益b2的估值。
27、在本发明一实施例中,经过smith预估器的处理,控制信号u到smith预估器的输出信号y0的传递函数关系如下:
28、
29、其中,s为拉普拉斯算子,u(s)为拉普拉斯变换后的控制输入。式(10)对应的时域表达式为:smith预估器的输出信号y0能够由时滞常数τ、系统实际输出信号y以及其微分信息得到,因此,时滞补偿的问题被转化为如何在实际工程中由不连续或带量测噪声的输出信号中合理提取连续信号即跟踪及微分信号的问题。
30、在本发明一实施例中,微分信号提取中,使用小时间常数惯性环节来获取如式(11)和(12)所示:
31、
32、
33、其中,惯性环节时间常数t,t1,t2越小,延迟信号y(t-t)越接近输出信号y(t),从而微分信号越接近理想微分信号;但是,利用小时间常数惯性环节来获取近似微分信号的过程中,随着t取值越小,对输出信号y(t)中的外部量测噪声放大越严重,甚至完全覆盖微分信号因此提出基于增强离散最优控制算法的跟踪微分器,来获取smith预估器中微分信号同时利用其跟踪的给定信号完成增强时滞补偿器的设计,以获得更好的时滞补偿效果;基于增强离散最优控制算法的跟踪微分器的具体表达式为:
34、
35、其中,k为常数且k=0,1,2,3…;v0为跟踪微分器的输出信号,v1,v2分别为v0的跟踪信号及其微分信号,e0为跟踪误差,h为采样周期即积分步长,r0为跟踪微分器的快速因子,h0为跟踪微分器的滤波因子,sign为开关函数,t1,t2分别为初始点到达开关曲线的时间和初始点到达原点的时间。
36、结合式(10)和(13)可得,基于跟踪微分器的增强时滞补偿器所得补偿信号如下:
37、
38、其中,y0(t)为补偿信号;v1,v2分别为系统输出信号y(t)的跟踪信号及其微分信号;为实际时滞的估值。
39、在本发明一实施例中,基于式(3)和式(13)-(14),设计时滞补偿adrc控制律算法,具体如下:
40、首先设计二阶eso:
41、
42、其中,z=[z1,z2]t,z1为位置内环模型输出y1的估值,位置内环模型总扰动f1的观测值被定义为z2;观测器的增益值β1和β2采用带宽法分别被整定为2ω01和其中ω01为观测器带宽。考虑到系统输出信号能够直接通过传感器测量得到且为了更好的克服eso的带宽问题,选取状态量为观测器输出,并定义新的状态量为得降阶eso如下:
43、
44、其中,降阶eso的增益值β0=ω01;假设选取适当的观测器带宽ω01,降阶eso能够准确的观测总扰动f1,观测误差趋于零;此时,基于reso的观测值,负反馈控制律u0选取及控制器输出量u1设计如下:
45、
46、其中,r1为系统参考值,e1为反馈误差,kp1为内环比例控制器增益;结合式(14),时滞补偿adrc控制律算法如下:
47、
48、在本发明一实施例中,针对式(9),一个新的观测误差反馈增益函数被引入设计新非线性eso如下:
49、
50、其中,δ1,δ2,δ3分别为压力环输出y2及其微分信息和总扰动f2的估值,γ1,γ2,γ3为观测器增益,参数α和ξ分别是滤波因子和边界层厚度,误差反馈增益函数根据新非线性eso的估值,压力外环模型的控制器设计如下:
51、
52、其中,r2为外环系统参考值,e2为外环反馈误差,kp2为外环比例控制器增益,kd为外环微分控制器增益。
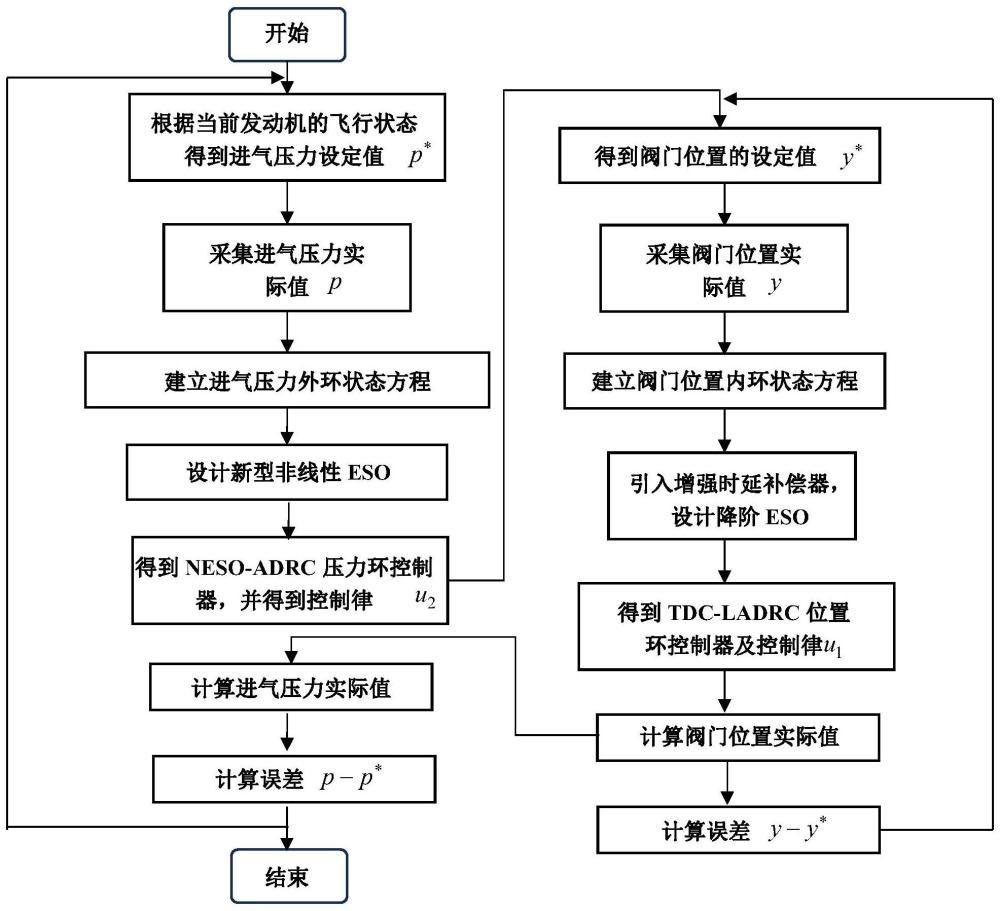
53、在本发明一实施例中,高空舱进气压力系统串级控制结构的工作原理是外环控制器通过压力传感器测得实际压力信号与设定进气压力值之间存在的误差反馈控制信号,信号转化后作为内环的给定信号与位置传感器得到的实际阀门位置信号作差,通过内环控制器实现液压伺服系统的控制,驱动调节阀动作,变化阀门开度实现气体流量调节,最终完成进气压力系统的压力控制。
54、本发明还提供了一种带增强时延补偿和新型非线性扩张状态观测器的高空舱进气压力系统串级自抗扰控制系统,包括存储器、处理器以及存储于存储器上并能够被处理器运行的计算机程序指令,当处理器运行该计算机程序指令时,能够实现如上述所述的方法步骤。
55、本发明还提供了一种计算机可读存储介质,其上存储有能够被处理器运行的计算机程序指令,当处理器运行该计算机程序指令时,能够实现如上述所述的方法步骤。
56、相较于现有技术,本发明具有以下有益效果:
57、(1)增强时滞补偿的引入,可以有效避免时滞带来的阀门位置控制的振荡与发散,不仅可以提高阀门位置的跟踪快速性与光滑性从而提高进气压力控制性能,更为重要的是保障航空发动机试验过程中,阀门运行的安全与寿命。
58、(2)基于增强离散最优控制算法的跟踪微分器,相比较传统的惯性环节来获取微分方式,可以有效滤除噪声影响提供更为精确的微分信号设计时滞补偿器,获得更好补偿信号用于位置内环自抗扰控制的设计,提高阀门位置的控制性能。
59、(3)利用具有“小误差时更大的增益,大误差时更小增益”的特性误差反馈函数设计新型非线性eso,更加准确地观测进气压力系统的总扰动,使得基于新型非线性eso的自抗扰控制改善压力外环的抗扰性能。结合带时滞自抗扰控制的位置内环,形成串级自抗扰控制方法实现高空舱进气压力系统的高品质控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198236.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。