-
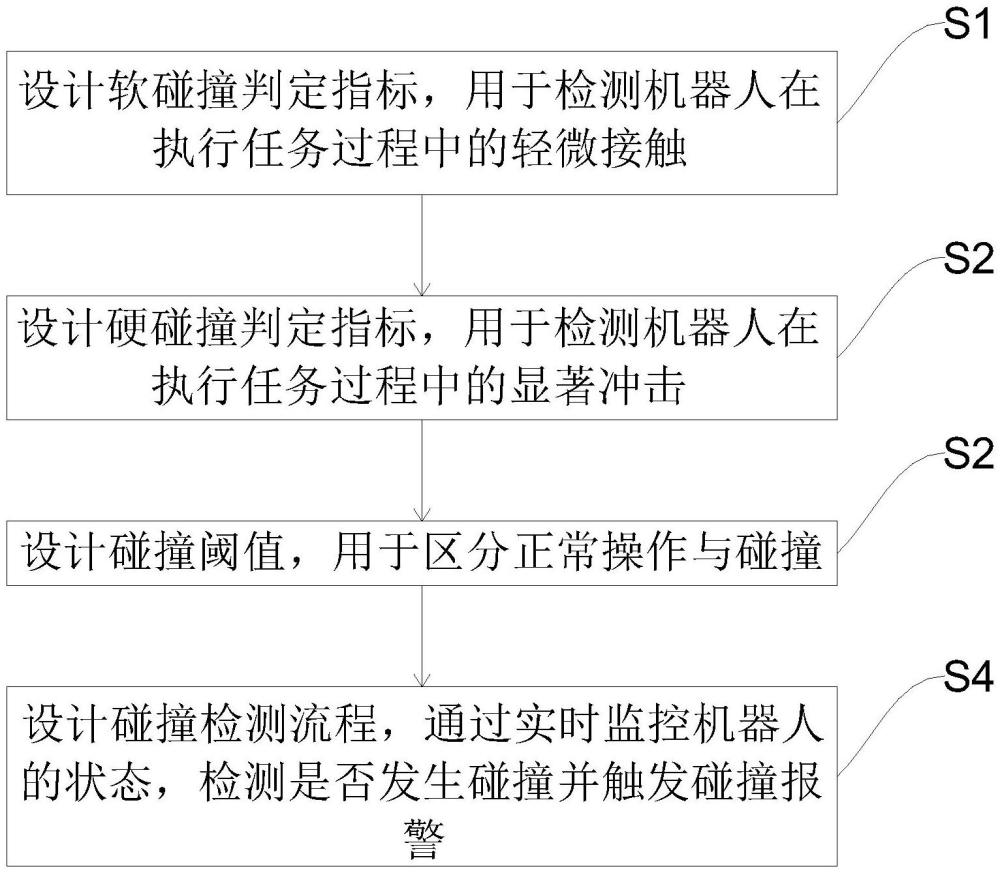
一种基于电流波动与动量观测器的工业机器人碰撞检测方法与流程
本发明涉及机器人碰撞检测领域,特别是涉及一种基于电流波动与动量观测器的工业机器人碰撞检测方法。背景技术:1、随着制造业对自动化和智能化水平要求的不断提高,工业机器人的应用日益广泛。在高效率、高灵活性的......
-
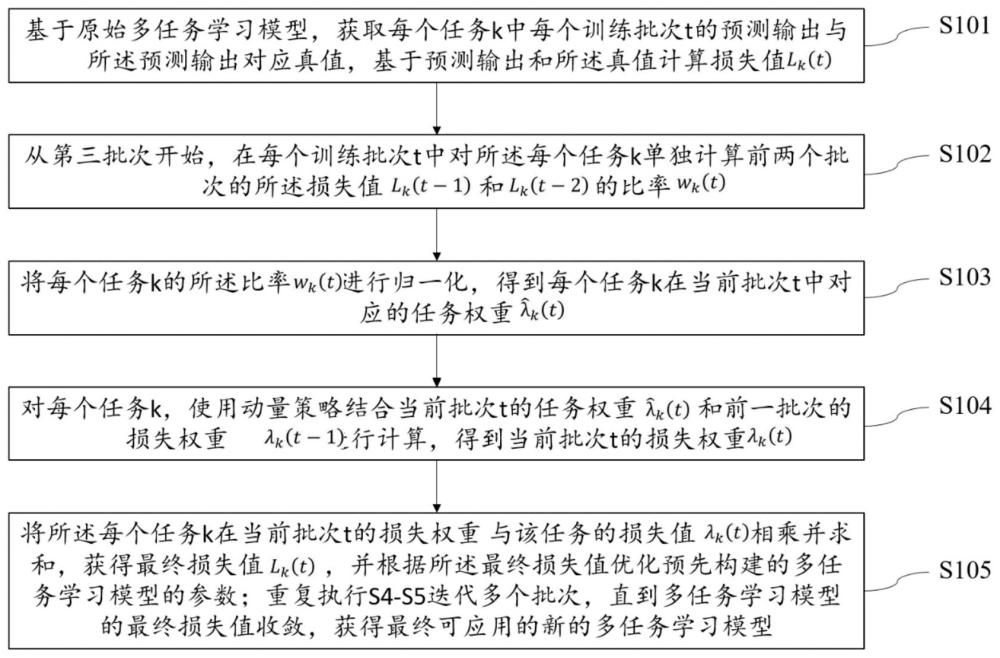
一种基于动量更新的多任务小粒度权重平均方法及系统
本发明涉及图像处理和机器学习,特别是指一种基于动量更新的多任务小粒度权重平均方法及系统。背景技术:1、多任务学习(multi-task learning,mtl)目标是利用多个学习任务中所包含的有用信......
-
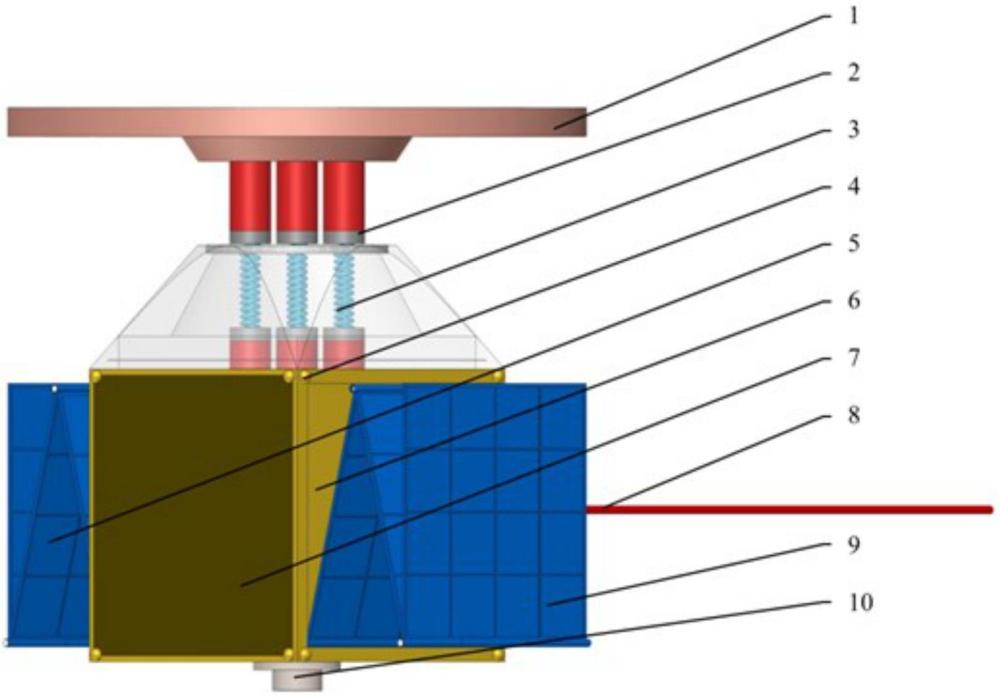
一种基于绳系动量隔离的空间非合作目标轨道转移系统及方法
本发明属于绳系卫星系统与空间轨道转移,具体涉及一种基于绳系动量隔离的空间非合作目标轨道转移系统及方法。背景技术:1、太空中的空间碎片、太空垃圾等非合作目标数量上的剧烈增长,已经严重危害到在轨航天器的正......
-
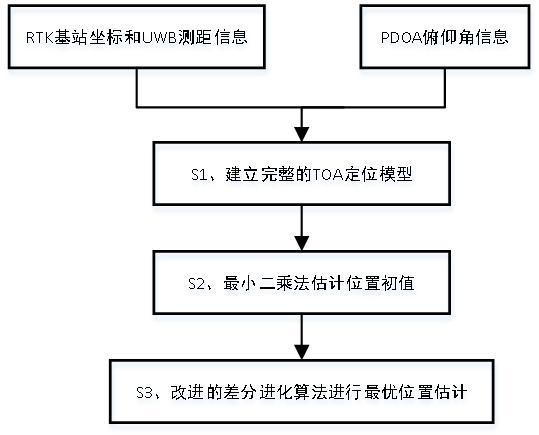
基于动量加速差分进化的最优位置估计方法
本发明属于测距定位,具体涉及一种基于动量加速差分进化的最优位置估计方法。背景技术:1、在现代定位系统中,准确地确定对象在各种环境下的位置是一个重要且挑战性的任务。尽管传统的全球定位系统(gps)在开阔......
-
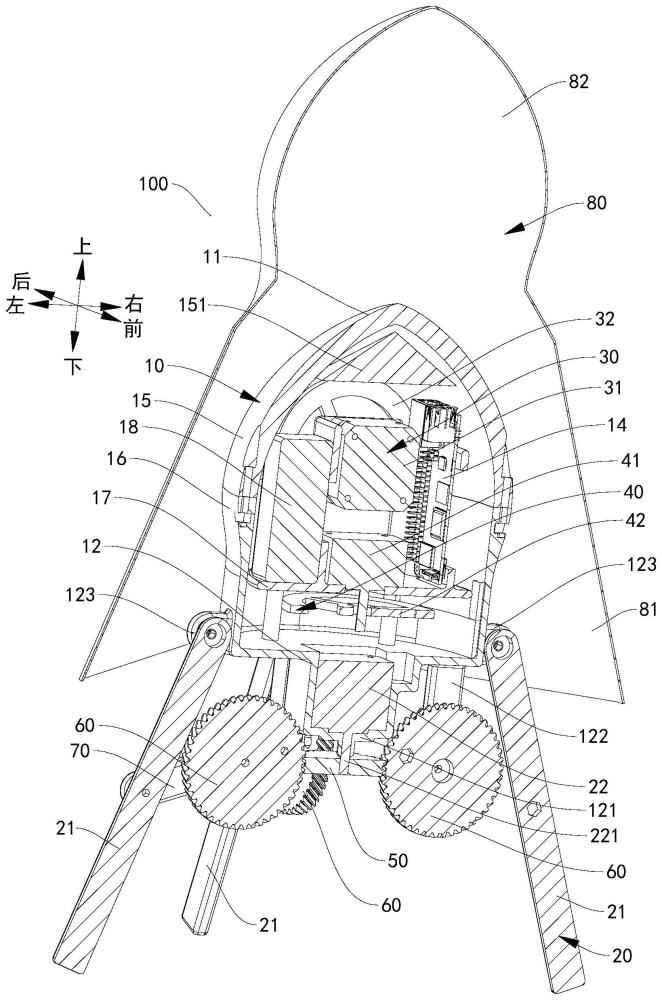
基于动量轮姿态控制的仿生机器水母
本发明涉及仿生,更具体地,涉及一种基于动量轮姿态控制的仿生机器水母。背景技术:1、水中生物种类丰富,水中生物的推进方式大体可分为三类:纤毛推进、射流反冲推进、波状摆动推进,其中射流反冲推进方式对于喷水......
-
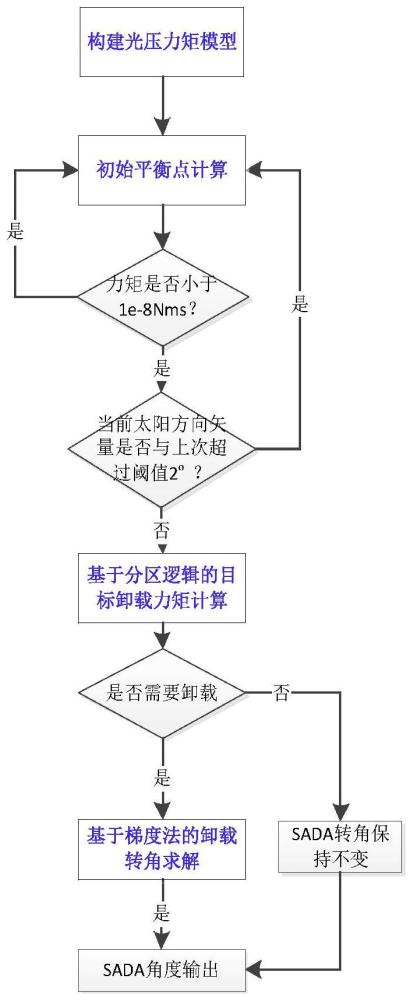
一种基于太阳光压的自主卸载动量轮角动量的方法与流程
本发明属于深空探测控制领域,特别涉及一种基于太阳光压的自主卸载动量轮角动量的方法。背景技术:1、在深空探测任务的整个任务期间,探测器需要经历长达数年的对日巡航飞行。在巡航对日期间,主要受到的干扰力矩为......
-
一种航天器用微型大角动量反作用飞轮的制作方法
本技术涉及飞轮领域,具体为一种航天器用微型大角动量反作用飞轮。背景技术:1、微型大角动量反作用飞轮是航天器中常用的一种姿态控制器件。它可以通过改变自己的转速和方向来改变航天器的姿态,从而使航天器保持稳......
-

一种减振性能可调节的卫星动量轮减振器
本发明属于航天器振动控制领域,更具体的,涉及一种减振性能可调节的卫星动量轮减振器。背景技术:1、随着遥感卫星技术的日新月异,当前各类卫星往往携带了大量先进的电子设备,用于观测和传输信息。这些设备通常具......
-
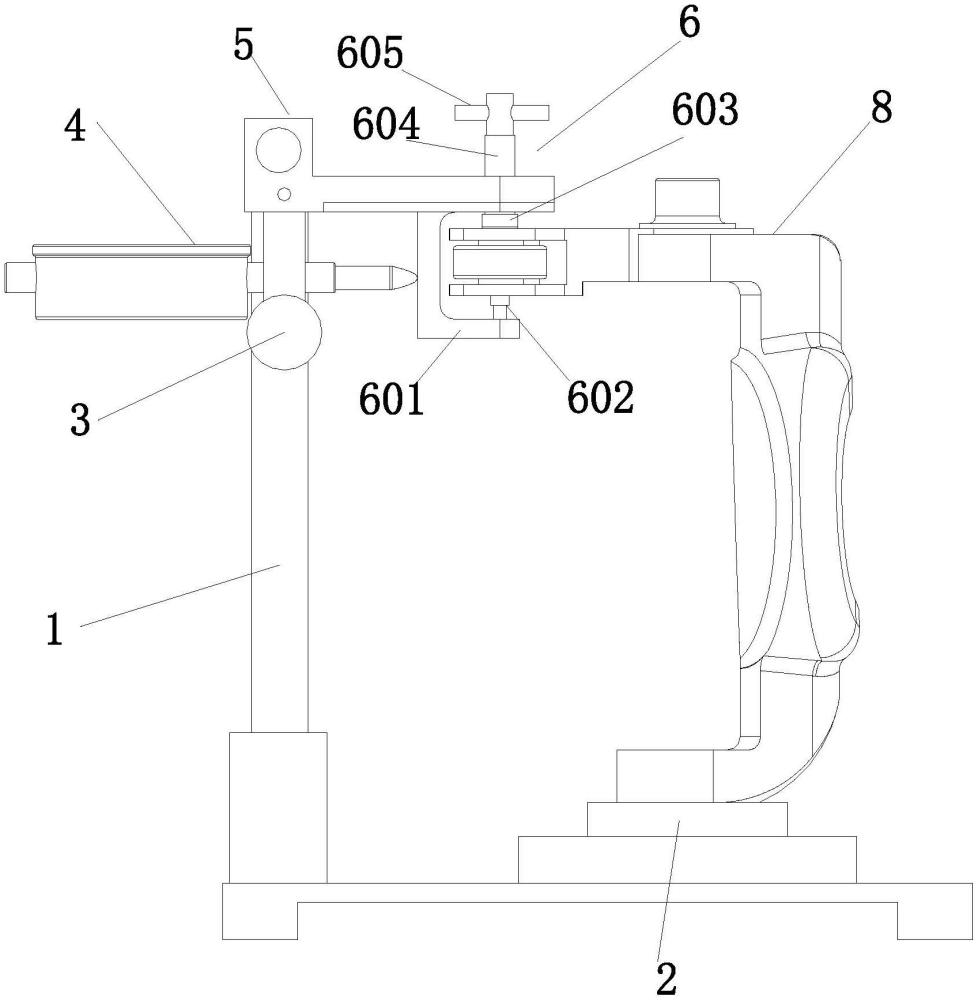
斜盘式液压柱塞泵斜盘小轴窜动量测量工装的制作方法
本技术涉及斜盘小轴窜动量测量领域,特别是一种斜盘式液压柱塞泵斜盘小轴窜动量测量工装及方法。背景技术:1、在具有小轴滚轮结构的斜盘式液压柱塞泵工作过程中,斜盘摇臂端滚轮长时间受到高频震动与径向力的作用,......
-
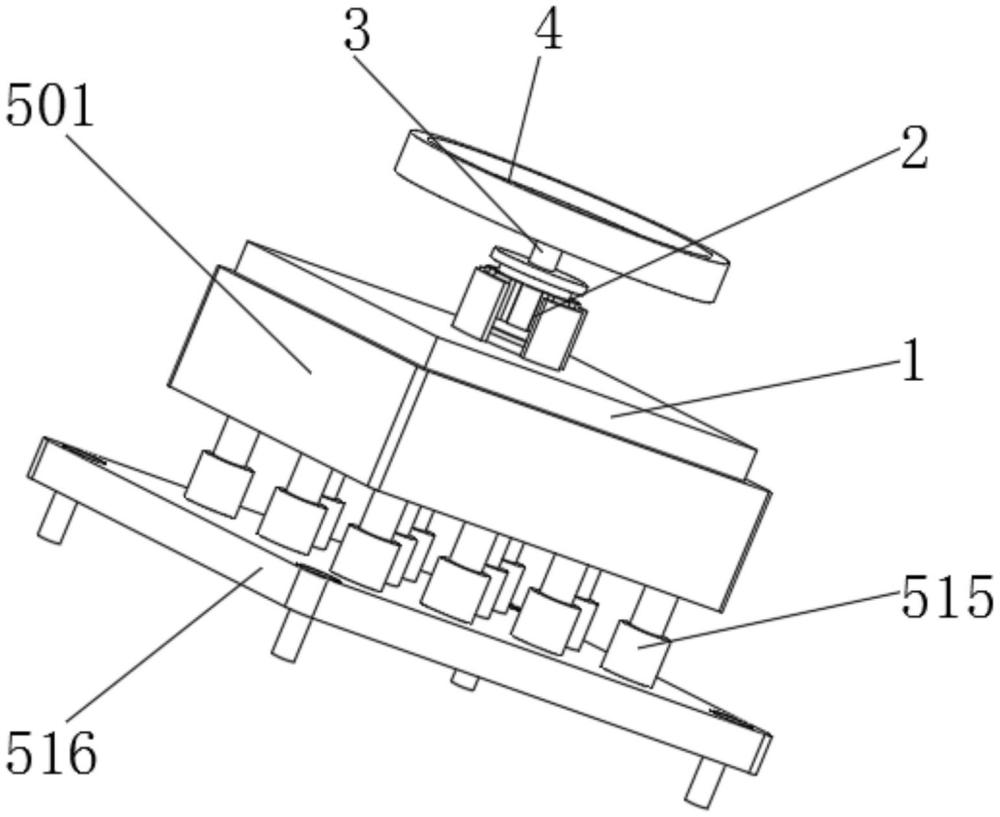
服装设计自动量衣设备及其使用方法
本发明涉及服装测量,特别涉及服装设计自动量衣设备及其使用方法。背景技术:1、服装设计过程中,对已有的服装进行研究时,需要对服装的各项尺寸进行测量,以便于分析服装的设计原理及思路。目前,一般通过人工使用......
-
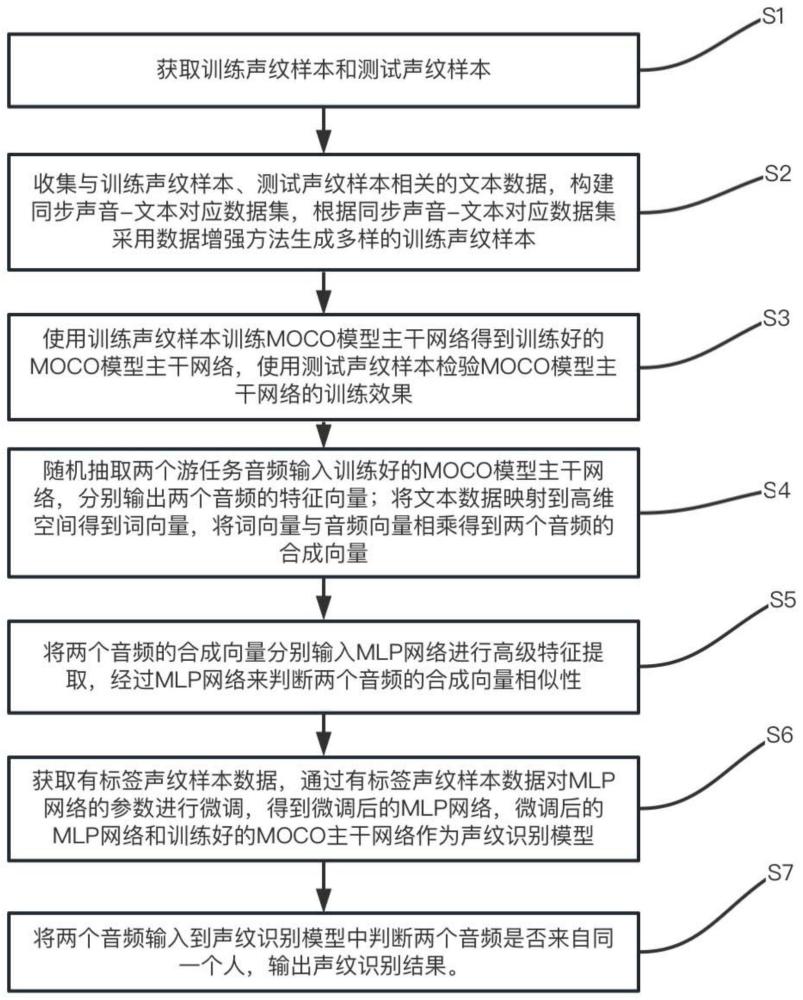
一种基于动量对比学习的声纹识别方法和设备
本发明涉及声纹识别领域,具体涉及一种基于动量对比学习的声纹识别方法和设备。背景技术:1、随着数字化时代的到来,身份识别与认证越来越成为日常生活中不可或缺的一项技术,常用的技术主要有密钥认证、人脸认证、......
技术新讯 > 动量 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01