同步磁阻电机新型磁链观测器模型预测速度控制方法
- 国知局
- 2024-09-11 14:19:24
本发明属于同步磁阻电机控制方法,具体涉及同步磁阻电机新型磁链观测器模型预测速度控制方法。
背景技术:
1、同步磁阻电机由于其坚固可靠,高效节能,调速范围宽,性价比高等优点被广泛应用于工、农业生产中。随着科技进步,市场对于电机的性能需求越来越高,高性能交流调速控制技术被广大学者深入研究,其中模型预测控制已成为一个重要的研究分支。
2、针对模型预测控制,目前所提出的大多数研究基本集中于电流、转矩以及磁链控制。然而,固有的级联结构限制了电机的动态响应性能,因此,需要对双闭环模型预测控制方案进行改进。模型预测速度控制综合了模型预测控制和直接速度控制的优点,克服了级联结构的局限性,实现转速环的高动态性能控制。
3、同步磁阻电机模型预测速度控制包括两个阶段:预测和最优化;在预测阶段,通过构建的电压电流模型对所需的控制变量进行预测。不同的预测变量不可避免地会对系统造成影响。因此在代价函数中可以设计多种优化目标,用于评估预测值和参考值之间相似度的工具,以此来实现多目标优化。
4、为了获得电机转子位置和速度信息,通常需要在转轴上安装霍尔传感器、光电编码器、旋转变压器等位置传感器,既增加了电机尺寸,又增加了成本,且传感器在高温、高湿度、粉尘、振动、电磁干扰等恶劣环境下容易损坏,导致系统可靠性降低。因此,如何在不使用传感器的情况下实现电机的高性能控制是目前的一个研究热点和难点。
技术实现思路
1、本发明的目的是提供同步磁阻电机新型磁链观测器模型预测速度控制方法,解决了现有模型预测控制方法需要依靠传感器,而传感器在恶劣环境下容易损坏,导致系统可靠性降低的问题。
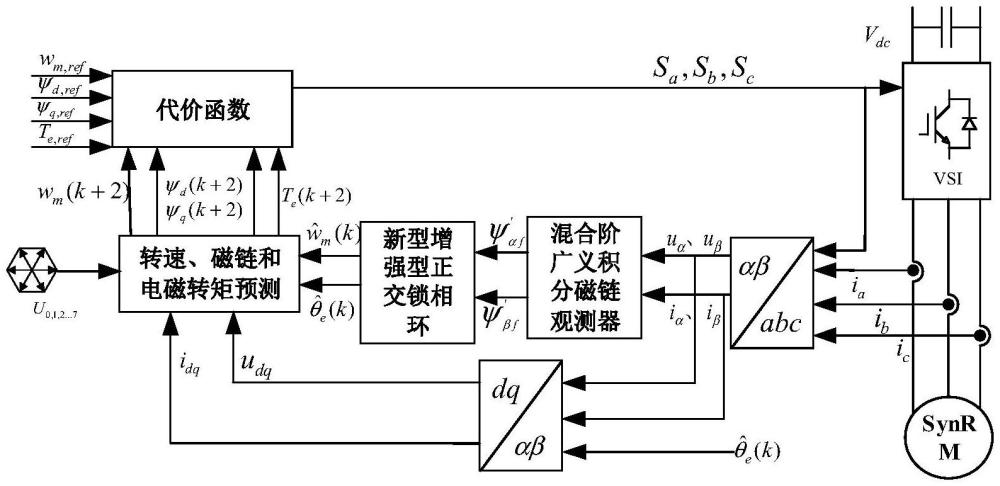
2、为了达到上述目的,本发明所采用的技术方案是:同步磁阻电机新型磁链观测器模型预测速度控制方法,在两相坐标系中建立同步磁阻电机数学模型,引入混合阶广义积分磁链观测器对电机滤除直流偏置和谐波的等效转子磁链进行估计,引入新型增强正交锁相环得到电机的转速和转子位置,并通过预测模型对转速、磁链、电磁转矩和开关变化次数进行预测控制,设计代价函数,计算代价函数确定最佳矢量,确定同步磁阻电机的控制性能。
3、本发明所采用的技术方案的特点还在于:
4、进一步的,同步磁阻电机新型磁链观测器模型预测速度控制方法,包括以下步骤:
5、步骤1、基于两相旋转坐标系和两相静止坐标系对同步磁阻电机的数学模型进行建模,得到同步磁阻电机数学模型;
6、步骤2、根据步骤1得到的同步磁阻电机数学模型构建混合阶广义积分磁链观测器,通过混合阶广义积分磁链观测器得到滤除直流偏置和谐波的等效转子磁链估计值;
7、步骤3、根据步骤2得到的滤除直流偏置和谐波的等效转子磁链估计值,通过新型增强正交锁相环得到电机的转速估计值和转子位置估计值;
8、步骤4、根据步骤1得到的同步磁阻电机数学模型建立预测模型,以步骤3得到的同步磁阻电机转速估计值作为预测模型的输入,对k+1时刻转速、磁链、电磁转矩和开关变化次数进行预测,以k+1时刻的预测值计算得到k+2时刻、转速预测值、磁链预测值、电磁转矩预测值和开关变化次数;
9、步骤5、根据步骤4得到的k+2时刻转速预测值、磁链预测值、电磁转矩预测值和开关变化次数设计代价函数,计算代价函数直接确定所选的最佳矢量,确定同步磁阻电机的控制性能。
10、进一步的,步骤1中,两相旋转坐标系下,同步磁阻电机的数学表达式如公式(1)、(2)、(3)、(4)、(5)所示:
11、
12、
13、
14、
15、
16、两相静止坐标系下,同步磁阻电机的数学表达式如公式(6)、(7)、(8)所示:
17、
18、
19、
20、将公式(7)和公式(8)代入公式(6)中,可以得到公式(9)和(10):
21、
22、
23、将公式(10)进行反park变换,可以得到公式(11):
24、
25、其中,ud、uq表示d轴下定子电压分量、q轴下定子电压分量;rs表示电机定子电阻;id、iq表示d轴下定子电流分量、q轴下定子电流分量;ψd、ψq表示d轴下定子磁链分量、q轴下定子磁链分量;ld、lq表示d轴下定子电感分量、q轴下定子电感分量;ωe表示电机电角速度;ωm表示电机机械角速度;te表示电磁转矩,tl表示负载转矩;j表示转动惯量;b表示阻尼系数;np表示极对数;uα、uβ表示α轴下定子电压分量、β轴下定子电压分量;iα、iβ表示α轴下定子电流分量、β轴下定子电流分量;ψα、ψβ表示α轴下定子磁链分量、β轴下定子磁链分量;l1、l2表示均值电感、差值电感;θr表示转子位置;ψ'α、ψ'β表示α轴下等效转子磁链分量、β轴下等效转子磁链分量。
26、进一步的,步骤2中,混合阶广义积分磁链观测器的表达式如公式(12)、(13)、(14)所示:
27、
28、
29、
30、其中,f1、f2、f3为混合阶广义积分磁链观测器三个输出的传递函数,μ为系数,ω1为基波频率,s为微分算子;
31、混合阶广义积分磁链观测器的输出函数f2经过积分观测等效转子磁链估计值,表达式如公式(15)所示:
32、
33、其中,ψ'αf、ψ'βf为α轴、β轴滤除直流偏置和谐波的等效转子磁链。
34、进一步的,步骤3中,新型增强型正交锁相环具体如公式(16)、(17)、(18)、(19)所示:
35、
36、
37、
38、
39、其中,表示转子位置估计误差;表示估计转子位置;表示谐振系数;ωc表示截止频率;ωr表示谐振频率。
40、进一步的,步骤4中,k+2时刻转速预测值、磁链预测值、电磁转矩预测值和开关变化次数具体为:
41、在同步磁阻电机有限集模型预测速度控制系统中,同步磁阻电机的定子电流状态方程作为预测时所依据的模型,利用前向欧拉离散式,k+1和k+2时刻定子电流预测值表示如公式(20)所示:
42、
43、依据同步磁阻电机的运动方程,得到k+2时刻转子机械转速预测值如公式(21)所示:
44、
45、k+2时刻的磁链预测值如公式(22)所示:
46、
47、k+2时刻电磁转矩预测值如公式(23)所示:
48、
49、开关变化次数ns如公式(24)所示:
50、ns=|sa(k)-sa(k+2)j|+|sb(k)-sb(k+2)j|+|sc(k)-sc(k+2)j| (24)
51、其中,ts为采样时间,ud(k)、uq(k)表示k时刻d轴下被选择的电压矢量分量、q轴下被选择的电压矢量分量;ud(k+1)、uq(k+1)表示k+1时刻d轴下被选择的电压矢量分量、q轴下被选择的电压矢量分量;id(k+1)、iq(k+1)表示k+1时刻d轴电流分量、q轴电流分量;id(k+2)、iq(k+2)表示k+2时刻d轴电流分量、q轴电流分量;ωe(k+1)为k+1时刻的电机电角速度,ωe(k+2)为k+2时刻的电机电角速度;ωm(k+1)为k+1时刻的电机机械角速度,ωm(k+2)为k+2时刻的电机机械角速度;ψd(k+2)、ψq(k+2)为k+2时刻的d轴磁链、q轴磁链;te(k)为k时刻的电磁转矩,te(k+1)为k+1时刻的电磁转矩,te(k+2)为k+2时刻的电磁转矩;tl(k)为k时刻的负载转矩,tl(k+1)为k+1时刻的负载转矩;sa(k)、sb(k)、sc(k)为k时刻的开关状态,sa(k+2)jsb(k+2)j sc(k+2)j为k+2时刻被选择的电压矢量分量下的开关状态。
52、进一步的,步骤5中,预测基本电压矢量作用下的转速ωrj(k+2),d、q轴磁链ψdj(k+2)、ψqj(k+2),电磁转矩tej(k+2),开关状态sa(k+2)j sb(k+2)j sc(k+2)j(j=0,1,…,7);再根据预测值计算相应的代价函数,最后选取使代价函数最小的电压矢量作为逆变器的最优输出,进而确定同步磁阻电机的控制性能,并在下一控制周期输出其对应的开关信号作用于两电平逆变器以驱动电机运转,具体如下:
53、代价函数的表达式如公式(25)所示:
54、
55、其中,λ1、λ2、λ3、λ4为权重因子,ψd,ref、ψq,ref是d、q轴磁链分量参考值,ωm,ref、te,ref是转速和电磁转矩的参考值。
56、本发明的有益效果是:
57、本发明的控制方法引入了混合阶广义积分磁链观测器对电机滤除直流偏置和谐波的等效转子磁链进行估计。引入了新型增强正交锁相环对电机的转速和转子位置进行估计。通过预测模型对转速、磁链、电磁转矩和开关变化次数进行预测控制,设计代价函数。采用代价函数,来获取最佳的开关状态,以此提升系统的动态和稳态性能,减小转矩脉动和开关损耗,提高电机的转速动态响应、负载响应和跟踪性能。
58、本发明的控制方法选择简化后的两相旋转坐标系和两相静止坐标系下同步磁阻电机的数学模型,避免了同步磁阻电机在三相自然坐标系下的动态数学模型表达式较为复杂且强耦合的问题,便于控制。
59、本发明的控制方法的混合阶广义积分磁链观测器在二阶广义积分磁链观测器上增加一个积分单元,在不引入负效应的前提下,消除等效转子磁链中的直流偏置和谐波。
60、本发明的控制方法的新型增强型正交锁相环采用qr控制器来减小位置误差存在的低次谐波的不利影响,从而减小电机转速波动,以此提高电机的无传感性能。
61、本发明的控制方法设置转速、磁链、电磁转矩和开关变化次数作为代价函数,对电机的转速、磁链、电磁转矩和开关变化次数同时进行控制,减小转矩脉动和开关损耗,提高电机的动稳态性能。
62、本发明的控制方法的模型预测速度控制中每一周期所采用的电压矢量都是通过代价函数在线计算寻优得到,相比采用离线设计开关表选择最佳电压矢量的方法更准确有效。
63、本发明的控制方法设置合适的代价函数,不仅可以用于闭环控制,也可用于脉宽调制优化及无速度传感器中转速估计等环节,具有更大的可行性范围。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290163.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。