一种面向通讯受损场景的无人机分布式协同预测控制方法
- 国知局
- 2024-07-31 23:43:14
本发明属于非电变量的控制或调节系统的,特别涉及一种多无人机协同飞行自动控制的面向通讯受损场景的无人机分布式协同预测控制方法。
背景技术:
1、随着近十年来科技水平的不断提高以及电子技术的不断进步,无人机已在诸多军事及民用领域脱颖而出,不断应用于地质勘探、远程搜救、遥感探测、交通运输等方面。面向日趋复杂的任务场景,多无人机协同控制逐渐成为一个非常热门的研究方向。
2、目前,已有非常多的研究人员对多无人机协同控制提出了先进的控制算法,例如pid控制、滑模控制、迭代控制等,然而这类控制算法很难将无人机系统的各类复杂约束考虑在内,这会对整个多机协同飞行带来不利影响。此外,综合考虑整体多无人机系统以及各项约束,传统的集中式控制器所无法避免的高计算负担和高通讯负载会严重影响多无人机协同飞行的可靠性。
3、另一方面,多无人机协同控制是在一定通讯网络下进行的,现有的研究大多假设无人机间的信息交互在理想环境下进行,但在实际的工程场景中,通讯网络可能会因网络带宽有限、流量拥塞、黑客攻击等原因形成链路故障,这类通讯受损因素将使得多无人机协同飞行控制任务偏离预期效果。
技术实现思路
1、本发明为了解决目前技术存在的问题,提出一种面向通讯受损场景的无人机分布式协同预测控制方法。
2、本发明的技术构思为,本发明提供一种面向通讯受损场景的无人机分布式协同预测控制方法,该方法基于无人机系统模型在分布式模型预测控制(distributed modelpredictive control,dmpc)框架下设计飞行控制器,在各个无人机的独立控制器中设计鲁棒多变量观测器(robust multivariate observer,rmo)用以估计虚假数据注入(falsedata injection,fdi)攻击及未知扰动干扰下的系统状态,同时面向网络化通讯受损场景设计补偿策略。
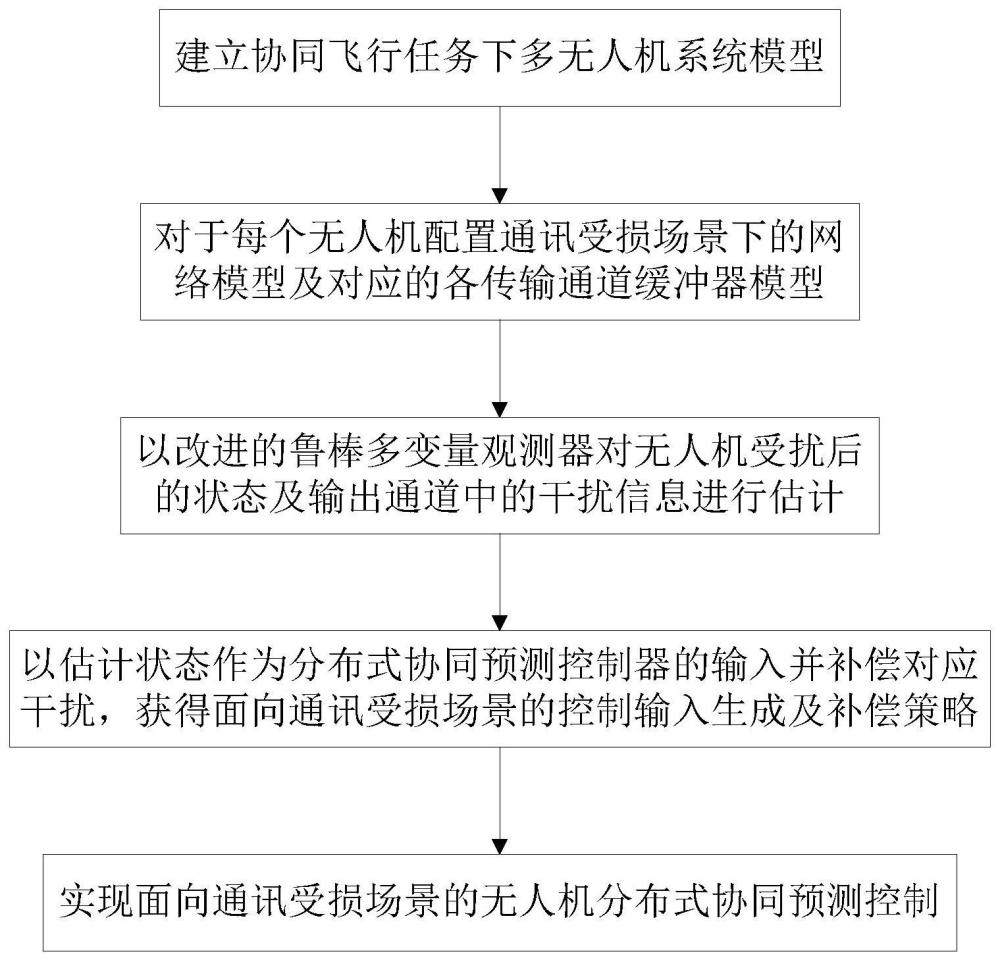
3、本发明采用的技术方案为,一种面向通讯受损场景的无人机分布式协同预测控制方法,所述方法建立协同飞行任务下多无人机系统模型,对于每个无人机配置通讯受损场景下的网络模型及对应的各传输通道缓冲器模型;以改进的鲁棒多变量观测器对无人机受扰后的状态及输出通道中的干扰信息进行估计,干扰信息包括但不限于测量扰动、估计虚假数据注入攻击,以估计状态作为分布式协同预测控制器的输入并补偿对应干扰,获得面向通讯受损场景的控制输入生成及补偿策略;以生成多无人机分布式协同预测控制器实现面向通讯受损场景的无人机分布式协同预测控制。
4、优选地,所述协同飞行任务下多无人机系统模型包括m架无人机,第i架无人机在k时刻满足式(1),
5、
6、其中,xi、yi、ui、wix、wiy和ai分别是无人机i的系统状态、测量输出、控制输入、有界系统扰动、测量扰动及在网络化通讯环境下面临的虚假数据注入攻击,和fi(·)为描述无人机的系统函数,fi(·):且满足fi(0,0)=0;ci、dix、diy和si均为具有预设维数的常数矩阵,且矩阵[diy si]为列满秩,即测量扰动wiy和虚假数据注入攻击ai是线性可分离的。
7、定义多无人机系统模型的约束。
8、优选地,所述约束满足,
9、
10、其中,和分别为包含原点在内的闭集和紧集。
11、优选地,所述通讯受损场景下的网络模型为
12、
13、
14、
15、其中,和分别为无人机自身传感器至控制器通道的传输信息丢包(s-c丢包)、无人机i自身控制器至驱动器通道的传输信息丢包(c-a丢包)、无人机i与邻居无人机j之间的交互信息丢包,ni为与无人机i具有有向通讯拓扑连接的邻居无人机集合;最大连续丢包时间分别为和即任意无人机自身的s-c丢包、c-a丢包及无人机i与任意无人机之间的信息传输丢包均受最大连续丢包时间限制,存在可靠且无时延的反馈链路可以感知每时刻是否发生丢包。
16、优选地,所述各传输通道缓冲器模型包括在无人机i的自身传感器至控制器通道和自身控制器至驱动器通道分别部署缓冲器和用于描述其自身的信息传输,还包括在无人机i与j的传输通道中部署个缓冲器用于描述其与邻居无人机之间的信息交互,其中,表示邻居无人机集合的基数且
17、优选地,对于k时刻缓冲器和的信息存储长度分别为2np+1和np,缓冲器的存储长度为nb,满足且nb≤np。
18、优选地,所述改进的鲁棒多变量观测器为,
19、
20、其中,li为待设计的观测器增益,为各向量的估计值,ξ=η,z,x,y,ci0=[ci diy si],为hi1的左逆,hi1=hi0+ni0ci0,
21、本发明中,将原系统的式(1)描述为以下增广系统
22、
23、其中,ci0=[ci diy si],为使得zi(k+1)左侧矩阵可逆,进一步令在增光系统的式两侧分别加上ni0ci0zi(k+1),得到,
24、hi1zi(k+1)=gi0zi(k)+fi0(xi(k),ui(k))+di0wix(k)+zi0yi(k)+ni0yi(k+1),
25、其中hi1=hi0+ni0ci0,定义为hi1的左逆,将上式重构为
26、
27、其中,
28、令作为增广状态,得到
29、
30、其中
31、得到改进的鲁棒多变量观测器。
32、优选地,以变量ri(k)表示无人机i是否需要优化求解,
33、
34、无人机i仅在ri(k)=1时求解优化问题,ri(k)=0则不求解优化问题。
35、优选地,针对通讯受损下多无人机分布式协同预测控制器设计对应约束优化问题为,
36、
37、
38、
39、
40、
41、其中,为k时刻最优控制输入序列,ωi(εi):={x|xtpix≤εi2}为所设计的终端域。
42、优选地,定义无人机i的代价函数
43、
44、其中,和为名义系统下的预测状态和预测控制输入,qi、ri、pi和rij均为对角加权矩阵,且为中所存储的状态信息,κ(x)为反馈控制律。
45、本发明中,基于分布式mpc的思想设计协同控制器,无人机i∈m的代价函数初始化为,
46、
47、其中,和为名义系统下的预测状态和预测控制输入,为用于实现不同无人机间同步飞行的同步项,为终端代价,qi、ri、pi和qij均为对角加权矩阵,其中qi和qij表示对应不同范数表达式的加权矩阵;xj(s|k)和xj(s|k-n)为无人机需向无人机i传输的交互状态信息,但由于邻居间传输通道中的随机丢包现象,这些信息可能无法实时获取,需要一定的补偿策略进行替代;
48、进而转化代价函数为
49、
50、根据mpc的基本原则,将作为最优控制输入作用于无人机i,为补偿各通道丢包带来的通讯受损影响,当ri(k)=1时求解多无人机分布式协同预测控制器对应的优化问题,并将作用于无人机i;当ri(k)=0时则直接将作用于无人机i,其中k-τ为距离k时刻最近的不丢包(此处指邻居交互信息的丢包)时刻;对于任意无人机重复上述步骤,直至协同飞行任务结束。
51、本发明涉及一种面向通讯受损场景的无人机分布式协同预测控制方法,建立协同飞行任务下多无人机系统模型,对于每个无人机配置通讯受损场景下的网络模型及对应的各传输通道缓冲器模型;以改进的鲁棒多变量观测器对无人机受扰后的状态及输出通道中的干扰信息进行估计,以估计状态作为分布式协同预测控制器的输入并补偿对应干扰,获得面向通讯受损场景的控制输入生成及补偿策略;以生成的多无人机分布式协同预测控制器实现面向通讯受损场景的无人机分布式协同预测控制。
52、本发明的有益效果在于:
53、(1)通过所设计的rmo,有效滤除输出通道中的测量扰动及fdi攻击影响并获得实际状态的估计值;
54、(2)通过基于缓冲器更新的补偿策略以及所设计的代价函数,有效应对了传输通道存在随机丢包的通讯受损现象;
55、(3)通过分布式mpc框架以及非周期求解优化问题,降低了协同飞行任务中的计算负担;
56、(4)分布式协同预测控制能有效降低通讯负载及计算负担,较好克服通讯受损因素,在未知干扰及复杂网络环境下具有较高的可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198258.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表