一种基于机器人路径规划的放射源定位方法、装置及系统与流程
- 国知局
- 2024-07-31 23:43:09
本发明涉及放射源定位,特别是涉及基于机器人路径规划的放射源定位方法、装置及系统。
背景技术:
1、目前国内针对放射源定位算法,目前国内也有许多成效:1、根据点核积分分析放射源的辐射场强分布情况进行定位,将辐射环境中的连续区域离散化,通过点核积分结合列主元消去和非复线性最小二乘算法来对存在的放射源强度反解,得到放射源可能存在的位置。通过可信度函数判别,估计放射源的实际位置。2、根据已有的放射源定位算法,并结合梯度上升算法提出的放射源搜寻方法,主要是通过对辐射场分布情况进行模拟,模拟出来的数据结合梯度上升算法对放射源的定位搜寻。3、三nal(ti)晶体的辐射探测器,来对放射源定位进行研究该探测器主要的组成成分是三nal(ti)晶体,可对接收到的伽马射线方向进行判别较少的伽马射线方向测量结果可利用峰值占比法来对放射源定位。4、通过辐射场的未知放射源产生的数据,首先对放射源存在的辐射环境进行不同网格划分并检测数据,然后根据这些数据还原辐射场模型,最后选用启发式算法进行扫描搜寻,实现放射源的定位搜索。
2、但是一般都是采用辐射探测器机器人通过人工手动遥操作来定位寻址。当搜寻范围大时,通过辐射探测机器人采用地毯式的方式进行定位搜寻,耗时较长。当搜寻范围小时,通过工作人员手持辐射探测装备的方式进行放射源定位搜寻。人工手动的方式对失控放射源定位搜寻需要大量的时间和人力资源,同时存在一定危险因素,并且最终定位效果也难达预期。
3、因此,发明人提供了一种基于机器人路径规划的放射源定位方法、装置及系统。
技术实现思路
1、(1)要解决的技术问题
2、本发明实施例提供了一种基于机器人路径规划的放射源定位方法、装置及系统,解决了现有技术中人工手动的方式对失控放射源定位搜寻需要大量的时间和人力资源,同时存在一定危险因素并且最终定位效果也难达预期的问题。
3、(2)技术方案
4、为了解决上述问题,本发明的实施例提出了基于机器人路径规划的放射源定位方法,包括:
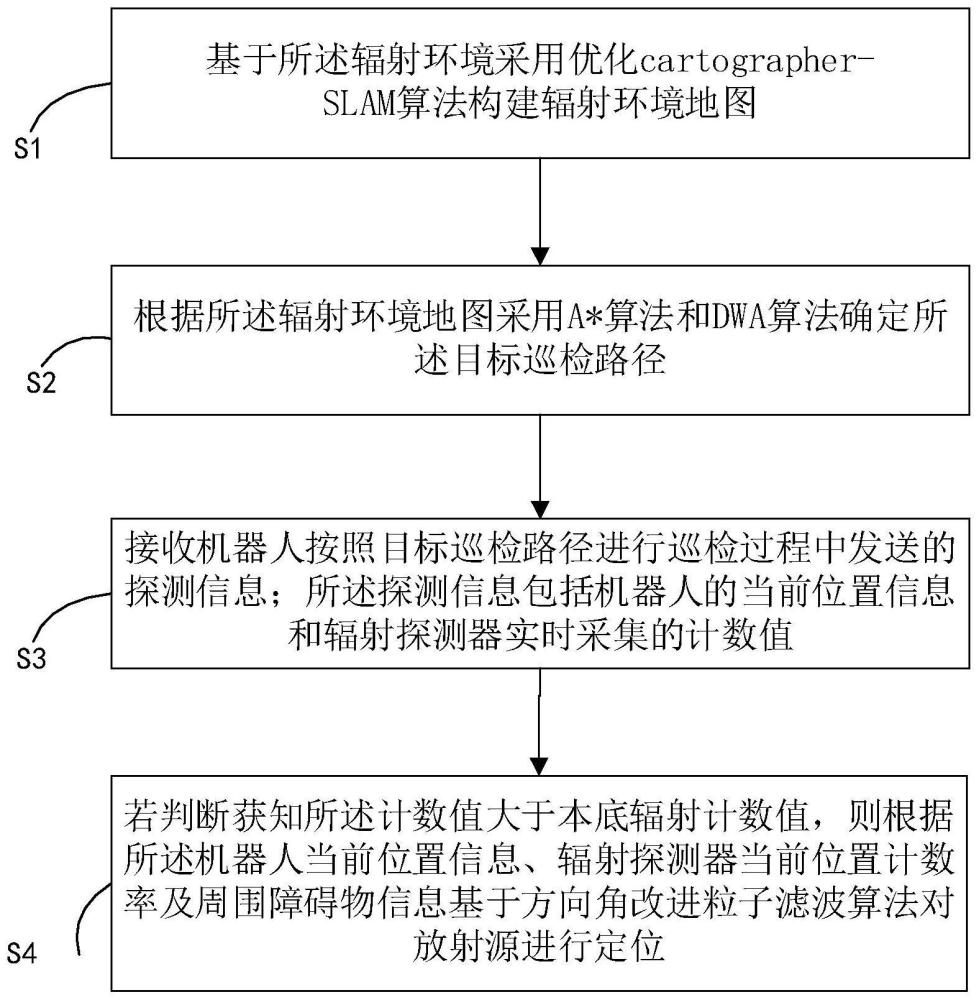
5、甲接收机器人按照目标巡检路径进行巡检过程中发送的探测信息;所述探测信息包括机器人的当前位置信息和辐射探测器实时采集的计数值;其中,所述目标巡检路径为预先设置的覆盖辐射环境且规避障碍物的巡检路径;
6、若判断获知所述计数值大于本底辐射计数值,则根据所述机器人当前位置信息、辐射探测器当前位置计数率及周围障碍物信息基于方向角改进粒子滤波算法对放射源进行定位。
7、可选地,所述方法还包括:
8、基于所述辐射环境采用优化cartographer-slam算法构建辐射环境地图;
9、根据所述辐射环境地图采用a*算法和dwa算法确定所述目标巡检路径。
10、可选地,所述根据所述机器人当前位置信息、辐射探测器当前位置计数率及周围障碍物信息基于方向角改进粒子滤波算法对放射源进行定位,包括:
11、s001、根据所述机器人当前位置信息获取方向角粒子集;
12、s002、根据所述方向角粒子集及所述辐射探测器当前位置计数率基于贝叶斯滤波理论的蒙特卡洛方法进行放射源估计,获得放射源参数估计值;
13、s003、基于所述放射源估计值判断是否找到放射源;若是,则根据所述放射源估计值确定所述放射源位置;否则,根据所述放射源估计值及周围障碍物信息确定下一观测位置;
14、s004、驱动所述机器人移动至所述下一观测位置,根据所述下一观测位置更新所述当前位置,然后返回步骤s001。
15、可选地,所述根据所述机器人当前位置信息获取方向角粒子集,包括:
16、基于所述机器人的当前位置信息生成初始粒子集;
17、根据所述机器人的运动方向角对所述初始粒子集进行筛选更新生成所述方向角粒子集。
18、可选地,所述根据所述机器人当前位置信息生成初始粒子集包括:
19、根据机器人当前位置信息进行粒子初始化生成第一粒子集;
20、对所述第一粒子集中所有粒子进行权值更新与归一化,得到第二粒子集;
21、筛选所述第二粒子集中的有效样本,并计算有效样本数量;
22、判断所述有效样本数量若不小于第一预设阈值则将所述第二粒子集作为所述初始粒子集。
23、可选地,所述根据所述机器人的运动方向角对所述初始粒子集进行筛选更新生成所述方向角粒子集,包括:
24、将所述初始粒子集中位于所述机器人的运动方向角范围内的粒子作为保留粒子;
25、将所述初始粒子集中位于所述机器人的运动方向角范围外的粒子作为舍弃粒子;
26、在所述机器人的运动方向角范围内生成与所述舍弃粒子相同数量的粒子,与所述保留粒子共同形成所述方向角粒子集。
27、可选地,所述基于所述放射源估计值判断是否找到放射源;若是,则根据所述放射源估计值确定所述放射源位置;否则,根据所述放射源估计值确定下一观测位置,包括:
28、对所述方向角粒子集进行重要性采样,获得目标方向角粒子集;
29、若判断获知所述目标方向角粒子集尺寸小于第二预设阈值,则判定找到放射源,根据所述当前位置放射源参数估计值确定所述放射源的位置;否则,根据所述当前位置放射源参数估计值确定所述机器人的目标位置;
30、根据所述机器人的当前位置信息和所述目标位置确定所述机器人的下一观测位置。
31、可选地,所述根据所述机器人的当前位置信息和所述目标位置确定所述机器人的下一观测位置,包括:
32、根据所述机器人的当前位置信息获取周围栅格;
33、基于当前位置信息、所述周围栅格和所述目标位置,采用a*算法确定目标栅格,将所述目标栅格所述所述机器人的下一观测位置。
34、本发明的实施例还提出了一种基于机器人路径规划的放射源定位装置,包括:
35、获取模块,用于接收机器人按照目标巡检路径进行巡检过程中发送的探测信息;所述探测信息包括机器人的当前位置信息和辐射探测器实时采集的计数值;其中,所述目标巡检路径为预先设置的覆盖辐射环境且规避障碍物的巡检路径;
36、判断模块,用于判断所述计数值与本底辐射计数值的大小;
37、定位模块,用于在所述判断模块判断获知所述计数值大于本底辐射计数值时根据所述机器人当前位置信息、辐射探测器当前位置计数率及周围障碍物信息基于方向角改进粒子滤波算法对放射源进行定位。
38、一种基于机器人路径规划的放射源定位系统,包括所述的基于机器人路径规划的放射源定位装置、机器人以及设置于所述机器人上的辐射探测器。
39、(3)有益效果
40、综上,本实施例的本实施例中的基于机器人路径规划的放射源定位方法,通过自动生成覆盖全场景、躲避障碍物的最优路径作为目标巡检路径后,在巡检过程中一旦根据辐射探测器实时采集的计数值判断存在放射源则自动进行放射源搜寻模式,并且在搜寻过程中通过基于方向角改进粒子滤波算法快速收敛确定辐射源位置,一方面全程无需人员干预,更加安全,另一方面也提高了辐射源的定位速度。解决了现有技术中人工手动的方式对失控放射源定位搜寻需要大量的时间和人力资源,同时存在一定危险因素并且最终定位效果也难达预期的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198252.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表