一种PAM驱动的双节CM角位置跟踪控制系统及算法
- 国知局
- 2024-07-31 23:43:12
本发明属于cm角位置控制系统,具体涉及一种pam驱动的双节cm角位置跟踪控制系统及算法。
背景技术:
1、cm自身的柔顺性以及驱动方式存在的强非线性特性为建模工作带来了巨大的挑战。不同于传统rm,cm虽然没有连杆与关节变量的定义,但其可通过改变cm各部分的变形量改变cm的末端位姿,所以对cm角位置的跟踪控制在cm的实际应用中具有非常重要的意义。
2、cc近似法被广泛应用于cm系统运动学模型的建立中,其可近似的表达每一段机械臂在三维空间中的姿态。进一步,利用各个cc界面衔接进而表达出多段cm的空间姿态,即可得到pcc模型。针对多节cm的角位置控制问题,由于cm系统的复杂性,对其建立精准的数学模型几乎是不可能的,故其可视为具有模型不确定性的多输入多输出非线性系统。因此,鲁棒控制器被广泛应用。利用神经网络和模糊逻辑系统对于未知非线性函数(依赖系统状态)的强大逼近能力开发控制策略;在控制器中引入自适应机制以观测系统中未知的常值参数;使用迭代学习算法辨识系统未知的时变参数。但在上述控制算法中,大量的参数在线学习增大了算法的计算量而且不易于工程使用。同时,上述算法保证了误差信号收敛至某一残差集,虽然该集合可调整,但其无法预知。
技术实现思路
1、本发明为了解决多输入多输出且非线性的cm角位置控制系统所具有的模型不确定性和神经网络、模糊逻辑系统、自适应技术和迭代学习等带来的算法计算负担、残差集无法预知等问题,进而提供一种pam驱动的双节cm角位置跟踪控制系统及算法。
2、本发明所采取的技术方案是:
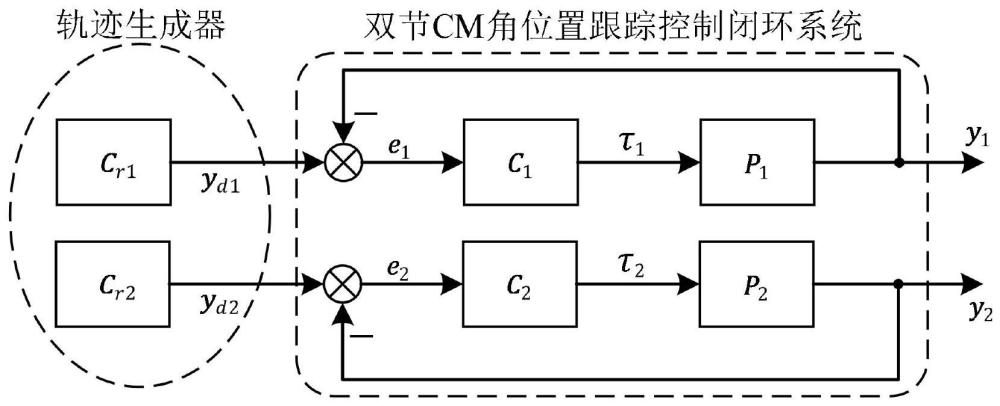
3、一种pam驱动的双节cm角位置跟踪控制系统,其特征在于:包括第一节机械臂轨迹生成器cr1、第二节机械臂轨迹生成器cr2及双节cm角位置跟踪控制闭环系统;
4、所述双节cm角位置跟踪控制闭环系统包括第一节机械臂反馈控制器c1、第二节机械臂反馈控制器c2、第一节机械臂模型p1及第二节机械臂模型p2,第一节机械臂角位置跟踪控制系统结构为:所述轨迹生成器cr1生成第一节机械臂的期望运动轨迹yd1,第一节机械臂的闭环系统根据第一节机械臂的实际运动轨迹y1减去第一节机械臂的期望运动轨迹yd1,得到第一节机械臂的位置误差e1,所述信号e1经过反馈控制器c1得到控制信号τ1,所述控制信号τ1作用于第一节机械臂的模型p1,得到所述第一节机械臂的实际运动轨迹y1;
5、第二节机械臂角位置跟踪控制系统结构与第一节机械臂角位置跟踪控制系统结构同理。
6、第一节机械臂反馈控制器c1和第二节机械臂反馈控制器c2的反馈控制器,包括性能函数、调节函数、误差转换方法和最终控制率。
7、一种pam驱动的双节cm角位置跟踪控制算法,包括以下步骤:
8、s1.使用基于单个集中质量假设并利用euler-lagrange形式推导出来的cm系统动力学方程;
9、s2.基于s1所述系统,选择控制目标为系统输出qj(t)跟踪给定的参考信号qdj(t),j=1,...,n,即系统输出角位置跟踪给定的参考角位置轨迹;
10、s3.对系统输出的暂态和稳态性能的上界施加预先约束;
11、s4.针对s3中的条件,进行反馈控制器的设计。
12、本发明与现有技术相比具有以下有益效果:
13、本发明通过引入误差转换策略来实现跟踪误差的调整,可以实现精准的输出跟踪。利用设计的调节函数以及设计过程,消除了当系统在新的初始条件下重新启动控制器参数需要重新选取的限制。并且所设计的反馈控制器中并未使用自适应机制、神经网络、模糊逻辑系统、干扰观测器等对未知项进行辨识,避免了大量在线学习参数的实时更新。此外,设计的反馈控制器无需计算或引入滤波器观测虚拟控制信号的导数,因此,所设计的反馈控制器结构简单。
技术特征:1.一种pam驱动的双节cm角位置跟踪控制系统,其特征在于:包括第一节机械臂轨迹生成器cr1、第二节机械臂轨迹生成器cr2及双节cm角位置跟踪控制闭环系统;
2.一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:包括以下步骤:
3.根据权利要求2所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s3中通过如下性能函数对系统输出的暂态和稳态性能的上界施加预先约束:
4.根据权利要求2所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s4.进行反馈控制器的设计,由以下步骤实现:
5.根据权利要求4所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s41中所设计的调节函数:
6.根据权利要求5所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s42中对角位置跟踪误差进行修改和转换:
7.根据权利要求6所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s43中设计的虚拟控制率:
8.根据权利要求7所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s44中利用s43设计的虚拟控制率对角速度进行修改:
9.根据权利要求8所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s45中设计的性能界限:
10.根据权利要求8所述的一种pam驱动的双节cm角位置跟踪控制算法,其特征在于:所述s46中设计的最终控制率:
技术总结一种PAM驱动的双节CM角位置跟踪控制系统及算法,属于CM角位置控制系统技术领域,为解决多输入多输出且非线性的CM角位置控制系统所具有的模型不确定性和神经网络、模糊逻辑系统、自适应技术和迭代学习等带来的算法计算负担、残差集无法预知等问题。设计一款结构简单的状态反馈控制器。该控制器通过将调节函数与误差变换技术相融合,使得设计的控制器无需使用自适应机制、神经网络或模糊逻辑系统以及迭代学习算法,且避免了对于跟踪误差初值的限制,不仅保证了预先设定的暂态与稳态跟踪性能,还确保了控制信号连续且无剧增现象。本发明设计的控制器可以有效实现PAM驱动的双节CM角位置跟踪控制。技术研发人员:高席丰,赵鹏越,张洲,李一帆受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198255.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表