面向无信号灯十字路口的自动驾驶多车协同控制方法
- 国知局
- 2024-07-31 23:42:42
本发明属于自动驾驶,涉及一种面向无信号灯十字路口的自动驾驶多车协同控制方法。
背景技术:
1、多车协同控制在改善交通流量、减少拥堵和提高驾驶安全性方面具有巨大的潜力,近年来备受学术界和工业界广泛关注。然而,在交通密集的无信号十字路口场景,实现安全、高效的自动驾驶多车协同驾驶仍然是一个极具挑战的任务。主要难点之一在于处理交通参与者之间的复杂交互,减少并解决车辆之间的交互是提高安全性和效率的重要方式。
2、目前,自动驾驶多车协同控制方法主要划分为三类:基于规则、基于规划以及基于优化的方法。基于优化的方法将车辆的行为集中建模为带有安全约束的优化问题,通过求解优化问题获得不同车辆的行驶轨迹。这类方法因具有良好的可解释性和适应性,近年来得到了广泛应用。其中,博弈论方法是基于优化的方法中极具代表性的方法之一,能够对车辆之间的博弈策略和交互行为进行准确建模,在解决多车协同控制交互问题方面存在突出优势。然而,在无信号灯十字路口,车辆之间的交互行为十分密集且复杂,同时交互的数量会随着环境车辆数量的增加呈指数性增长,博弈论方法的计算复杂度也呈现指数增加。博弈论策略的求解失败会增加车辆交互的碰撞风险,导致安全性和通行效率降低。尤其是在交通密集的无信号灯十字路口,这是制约博弈论规划方法应用的主要因素。
3、因此,亟需一种能够有效减少和处理车辆复杂交互的多车协同控制方法。
技术实现思路
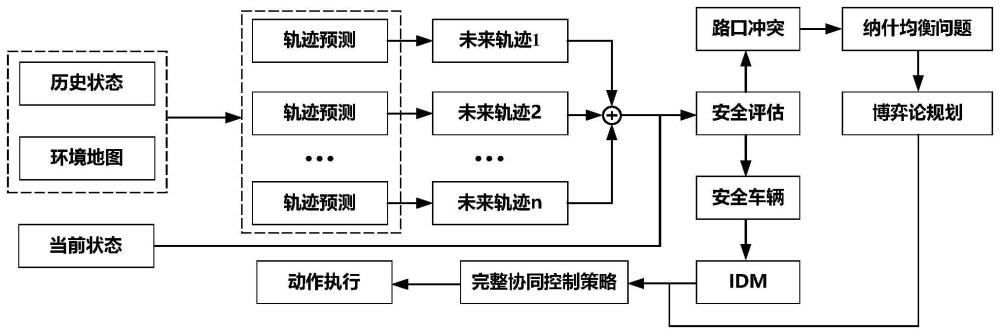
1、有鉴于此,本发明的目的在于提供一种面向无信号灯十字路口的自动驾驶多车协同控制方法,利用安全评估模型对路口内车辆的当前状态和未来轨迹进行评估,从而精确地找到发生局部的车辆冲突,并分别用博弈论方法和idm分别求解冲突车辆和无冲突车辆的控制策略,从而实现安全、高效和有效的多车协同控制,综合考虑了预测信息对多车交互的影响,不仅有效降低了交互数量,而且提升了在交通密集的无信号灯十字路口下多车协同控制的安全性、舒适性和通行效率。
2、为达到上述目的,本发明提供如下技术方案:
3、一种面向无信号灯十字路口的自动驾驶多车协同控制方法,具体包括以下步骤:
4、s1:构建基于深度学习的无信号灯十字路口多车轨迹预测模型,基于车辆历史状态和环境地图信息,输出路口内所有车辆的预测轨迹;
5、s2:构建基于rss的安全评估模型,根据车辆的当前状态和步骤s1的预测轨迹,输出每个车辆与周围车辆的冲突关系;其中,rss表示责任敏感安全;
6、s3:构建基于博弈论和idm的运动规划模型,对有冲突车辆与无冲突车辆进行分别控制和联合行动;其中,idm表示智能驾驶员模型。
7、进一步,步骤s1中,构建基于深度学习的无信号灯十字路口多车轨迹预测模型,具体包括以下步骤:
8、s11:轨迹预测模型输入:轨迹预测模型的输入包含两个部分,第一部分为无信号灯十字路口内所有车辆在[t-th,t]的历史轨迹信息第二部分为向量化的环境地图信息
9、
10、
11、
12、其中,表示轨迹预测模型的输入,n表示此刻路口内车辆的数量;在每个时刻,表示车辆i在[t-th,t]的历史状态信息,th表示表示输入历史轨迹的长度,分别表示横坐标、纵坐标、航向角和速度;表示车辆i在t时刻对应的序列化地图向量;
13、s12:提取动力学特征:t时刻的历史状态序列首先进入全连接层,然后用leaky_relu激活函数进行激活,最后通过rnn编码,得到所有车辆的动力学特征;
14、s13:提取交互特征:将步骤s12中获得的动力学特征输入双层结构的图注意网络gta中,输出车辆的交互特征;
15、s14:提取地图特征:用lstm对序列化的地图向量进行编码,提取地图特征;
16、s15:未来轨迹解码:将步骤s11~s13提取的动力学特征、交互特征和地图特征拼接成完整特征张量,然后输入到lstm解码器;根据车辆类别不同,采用不同的lstm网络对机动车和非机动车特征进行分别解码,最后获得所有车辆的预测轨迹:
17、
18、
19、其中,表示所有车辆在t时刻的预测轨迹,表示车辆i在t时刻的预测轨迹,包括车辆的x、y坐标;tf为预测时间长度。
20、进一步,步骤s2具体包括以下步骤:
21、s21:构建安全评估指标:根据rss提出的安全规则,确定车辆之间所能允许的最小安全距离dmin;
22、s22:构建风险评价函数:评价函数的输入为每个车辆与周围车辆的距离,评价指标为车辆之间的距离是否小于最小安全距离,输出结果包括[0,1],0代表安全,1代表冲突;
23、s23:量化风险值:每个车辆根据步骤s22中的评价函数对周围车辆在[t,t+tf]的轨迹进行评估,通过加权求和得到风险分数:
24、
25、其中,表示在t时刻车辆j对车辆i的风险值,是与时间序列相关的加权系数,为步骤s22中的评价函数的输出结果;
26、s24:构建冲突车辆集合:每个车辆按照步骤s23遍历周围车辆,将获得的风险值与风险阈值对比,得到需要关注的冲突车辆集合最后输出所有车辆的冲突集合nt:
27、
28、
29、进一步,步骤s21中,车辆之间所能允许的最小安全距离dmin包括最小纵向距离和最小横向距离即:
30、
31、
32、
33、其中,表示最小纵向安全距离,表示最小横向安全距离;vix、vjx分别表示车辆i和车辆j的纵向速度,τ为反应时间,amax为最大加速度,βmin、βmax分别表示最大舒适减速度和最大紧急减速度;μ为能容许的最小车辆侧间距,viy、vjy分别为车辆i和车辆j的横向速度,为横向最大舒适减速度;
34、在对预测轨迹的评估中,对最小安全距离进行计算时采用每个车辆当前航向角方向上的期望速度,并且投影到纵向和横向,即:
35、
36、其中,vx和vy分别表示用于计算最小安全距离的纵向速度和横向速度,vexp表示车辆的期望行驶速度,和分别为t时刻车辆的纵向速度和横向速度,为车辆的航向角;
37、步骤s22中,当两个车辆同时满足和时,才能认为d<dmin,评价函数的具体表示形式如下:
38、
39、其中,q为评价函数的输出结果,dx和dy分别表示纵向安全距离和横向安全距离,d表示安全距离。
40、进一步,步骤s3具体包括以下步骤:
41、s31:设定车辆动力学模型;
42、s32:编码冲突关系:采用交互图编码车辆之间的冲突关系;
43、s33:构建代价函数:使车辆以尽量接近期望的速度去跟踪参考路径,同时惩罚不必要的加速;
44、s34:求解纳什均衡策略:通过优化纳什均衡问题,生成冲突车辆的纳什均衡策略;
45、s35:设定idm规划器:idm规划器用于无冲突车辆的控制;
46、s36:生成协同控制策略:基于s32~s35的步骤,将所有车辆的行动策略进行整合,得到完整的多车协同控制策略,交由被控制车辆执行。
47、进一步,步骤s31中,所有车辆采用相同的动力学模型,动力学方程表示为:
48、
49、其中,表示对车辆i在t时刻状态的微分(求导),表示对函数p(l,ν;θ)的微分(求导),l和ν分别表示车辆在其路径上的位置和速度,li-1表示1/li,li表示车辆i在其路径上的位置,表示车辆i在t时刻在其路径上的位置,表示车辆i在t时刻在其路径上速度;和是用于将路径位置l映射到x和y坐标的系数,θ表示的系数输入项(该函数在这里是一般表达);为车辆i在t时刻的控制量。
50、进一步,步骤s32具体包括:每个交互图g的定义为:
51、g=(v,e)
52、其中,节点i∈v编码了车辆i的信息,边缘(i,j)∈e编码了车辆i对车辆j的关注,将车辆i的交互集表示为ni={j|(i,j)∈e};
53、在t时刻,为每个交互图gt生成相应的纳什均衡问题,当路口内的冲突不唯一时,生成多个纳什均衡问题。
54、进一步,步骤s33中,代价函数ji(si,ui)的定义如下:
55、
56、其中,和分别表示车辆i的控制策略和状态变量,qi和ri是与车辆相关的可变目标权重,是车辆i的期望速度,t表示时间步长;
57、基于上述定义,最优策略表示为:
58、
59、
60、
61、
62、其中,umin、umax分别表示控制量的下限值和上限值,表示被观测车辆在t时刻的预测控制量,表示避障约束。
63、进一步,步骤s34具体包括:若一个纳什均衡问题中有m个参与车辆,纳什均衡策略定义如下:
64、
65、其中,表示车辆i在t时刻的控制策略,当其他车辆的策略固定时,每个车辆的控制策略对各自的问题最优,此时没有车辆能再通过改变自己的策略来降低成本代价;
66、优化问题中,每个车辆的控制策略和状态变量具体表示为:
67、
68、
69、其中,n和m分别表示状态维度和控制输入维度,表示车辆i的控制策略维度,表示车辆i的状态变量维度,n表示控制时域,t=0.1s为时间步长。
70、进一步,步骤s35具体包括:定义跟随车辆为自车车头30°范围内的前方最近车辆,在给定自车速度vc和相对速度vr的情况下,idm规划器计算的期望车间距dexp和加速度a如下:
71、
72、
73、其中,dmin为最小车间距,k为期望的车头时距,amax和βpref分别为最大加速度和舒适减速度,vexp为期望行驶速度,dc为当前车间距。
74、本发明的有益效果在于:本发明在多车协同控制过程中考虑车辆预测信息中的隐式冲突关系,并让自动驾驶汽车同存在冲突的周围车辆协商联合行动策略,从而实现安全高效的无信号灯十字路口多车协同控制,与传统多车协同控制方法相比,能够针对路口内的局部冲突进行精确交互,在不扰乱车流的前提下提高安全性和通行效率。
75、1)本发明设计了一种基于深度学习的无信号灯十字路口多车轨迹预测模型,该模型可以从车辆历史状态和环境图中提取动力学特征、交互特征、地图特征,特征信息通过解码器解码后输出车辆的未来轨迹,实现了对路口内所有车辆的精确轨迹预测。
76、2)本发明设计了一种基于责任敏感安全(rss)的安全评估模型,该模型通过对车辆的当前状态和预测轨迹进行评估,输出每个车辆与周围车辆的冲突关系,相比于rss模型,考虑了预测信息中的潜在车辆冲突,提升了安全评估模型的精度和时间视界。
77、3)本发明设计了基于博弈论和idm的多车运动规划方法,该方法能够根据车辆之间的交互关系对不同的车辆采取不同的控制策略,并利用博弈论解决交互车辆的冲突问题,提升了无信号灯十字路口多车协同控制的安全性和通行效率。
78、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198216.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表