基于神经网络的非完整约束轮式机器人自适应轨迹跟踪控制方法和装置
- 国知局
- 2024-07-31 23:42:39
本发明涉及非完整约束轮式机器人轨迹跟踪领域,具体而言,是一种通过控制轮式机器人的电机电压,利用神经网络拟合控制系统中的非线性项,从而驱动轮式机器人自适应轨迹跟踪的方法和装置。
背景技术:
1、随着人工智能的蓬勃发展,在需要自主性的非结构化环境中,最重要的成就之一就是利用机器人代替人类执行各种任务。由于机器人系统具有快速决策和高精度的特点,移动机器人在不同领域得到了广泛的应用。在工业自动化生产中,移动机器人扮演了十分重要的角色。物流场景中,移动机器人可以根据程序自主进行货物的搬运、存储、组装等动作,能够实现货物分拣、装箱、码垛等多种工作,极大提高物流效率;安全监测场景中,移动机器人可以代替人工,在高温、强辐射、有毒污染等危险环境中完成安全巡视任务,提高生产过程中的安全效率。在医疗领域,移动机器人能够在医疗环境中辅助医生进行手术和操作,具有高精度的运动控制和成像系统,可以在微小区域内进行操作。此外,移动机器人还广泛应用于农业、服务业、娱乐、教育等各个领域。可以说,现代社会的生产生活已经与移动机器人密不可分。
2、非完整约束轮式机器人属于移动机器人的一类,在高能效、快速响应、先进的控制动力学等方面呈现出巨大的优势。然而,这类机器人的系统结构会收到各种扰动源的影响,存在一定的不确定性。这里的不确定性包括运动学和动力学模型的不确定性、来自未知环境的外部干扰、参考轨迹的扰动和噪声等方面。为了克服这些不确定性,实现轮式机器人精确的轨迹跟踪目标,目前已提出并应用了多种控制方法,包括反步法、模糊控制法、滑模控制法、自适应控制法、神经网络控制法等。文献(w.dong,k.d.kuhnert,robust adaptivecontrol of nonholonomic mobile robot with parameter and nonparameteruncertainties,ieee trans.robot.21(2005)261–266.)在具有参数和非参数不确定性的非完整移动机器人上开发并应用了鲁棒自适应控制器。专利cn115097834a介绍了一种采用高斯过程回归方法获得的均值和方差来设计误差补偿项与鲁棒控制项、建立自适应轨迹跟踪控制器模型的方法。专利cn113985890a介绍了一种通过神经网络对轮式机器人运动学控制器的控制参数进行在线整定,实现精准跟踪参考轨迹的技术。
3、到目前为止,上述控制方法大多基于轮式机器人的转矩控制。然而实际应用中,转矩无法由控制器直接产生,而是通过电压控制的直流电机产生,以上所述方法需要两层控制结构,会导致系统更多的非线性性和不确定性。此外,转矩控制方法对机器人动力学模型的准确性要求较高,而机器人动力学模型存在非线性、耦合、计算量大、摩擦和非理想性等特点,控制系统可能需要复杂的控制策略和参数调整,这会导致控制系统的相对复杂性。
技术实现思路
1、本发明针对以上问题,提出一种基于神经网络的非完整约束轮式机器人自适应轨迹跟踪的电压控制方法装置,旨在使机器人轨迹跟踪控制更高效、更精准、更鲁棒。
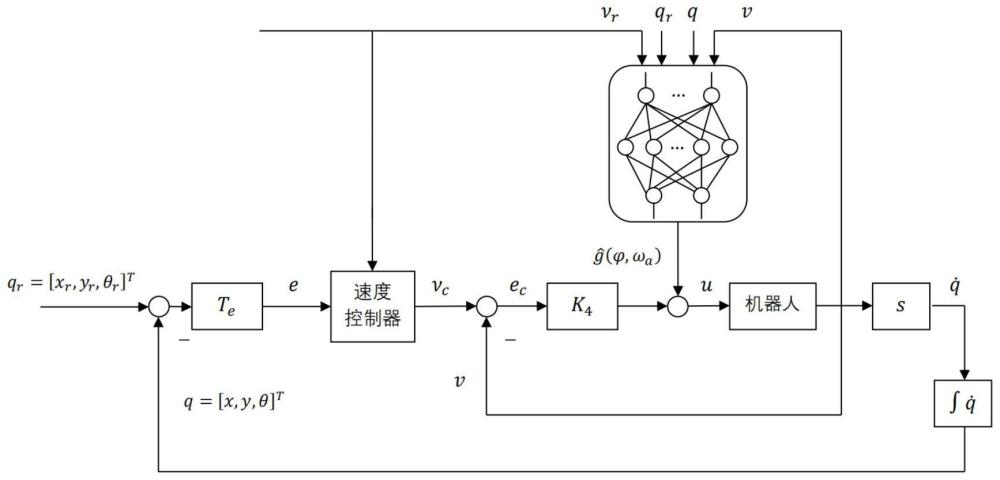
2、本发明的非完整约束轮式机器人自适应轨迹跟踪方法。控制器的输入是参考轨迹的位姿与机器人当前位姿的差值,接着根据所设置电压的自适应控制律调整驱动电机的电压,从而输出机器人的轮速,继而调整机器人的位置和方向以实现自适应轨迹跟踪。总体方法是:首先,由已知参考轨迹的位姿和机器人当前位姿,建立轨迹跟踪误差系统模型。然后,根据移动机器人的动力学方程和非完整约束轮式机器人的运动学方程,构建轮式机器人的动力学方程。接着,引入直流电机的电动力学方程,以及电机角速度和笛卡尔速度之间的关系,与轮式机器人动力学方程结合,建立完整的以直流电机为执行器的电动力学模型。再结合轨迹跟踪误差模型及电动力学模型,通过反步法设计轨迹跟踪的电压控制自适应律。最后,结合神经网络改进自适应律,实现对整个电动力学模型的非线性项的逼近和拟合,完成机器人的轨迹跟踪控制。
3、本发明的第一个方面涉及一种基于神经网络的非完整约束轮式机器人自适应轨迹跟踪的电压控制方法,具体步骤如下:
4、步骤1,建立轨迹跟踪误差系统模型;
5、本发明选用圆形参考轨迹。qr=[xr,yr,θr]t是参考轨迹的位姿,q=[x,y,θ]t是机器人的位姿,其中x是机器人在平面上的x坐标、y是机器人在平面上的y坐标、θ是机器人的方向角。根据参考轨迹与机器人的位姿差,建立轨迹跟踪误差系统模型:
6、
7、接着计算e的导数
8、
9、其中,vr1、v1分别是参考轨迹和机器人的线速度,vr2、v2分别是参考轨迹和机器人的角速度。根据设计控制速度vc,通过速度指令更好实现对轨迹的跟踪,
10、
11、其中,vc1是目标跟踪线速度,vc2是目标跟踪角速度;k1、k2、k3是控制增益,k2>0,最后得到速度跟踪误差ec=vc-v,其中v是机器人的速度。
12、步骤2,建立轮式机器人动力学模型;
13、根据牛顿第二定律,移动机器人动力学方程可表述为:
14、
15、其中m(q)是正定对称惯性矩阵,表示科里奥利力矩和离心力矩,是摩擦力矩,g(q)表示重力力矩,τd是有界未知扰动。矩阵b是输入系数,τ是控制输入向量,a(q)t是约束力的权重矩阵,λ是约束力。
16、结合非完整轮式机器人的运动学方程
17、
18、其中,s满足sta(q)t=0。
19、等式(4)左乘st,并将等式(5)带入等式(4),建立轮式机器人的动力学方程:
20、
21、其中,
22、步骤3,建立轮式机器人电动力学模型;
23、直流电机的电动力学方程是
24、
25、其中jm是电机轴惯性对称矩阵,θm是电机角位置矢量,bm是阻尼,r为减速齿轮比,τ为电磁转矩,km是转矩常数对角矩阵,ia是电机电流矢量。
26、电机角速度与笛卡尔坐标系之间的关系为
27、
28、其中雅可比矩阵rw是轮子半径,rw是轮轴半径,表示机器人左右轮的角速度。
29、将ia从等式(7)代入直流电机的电磁学方程结合等式(8)及电机角度与轮轴角度的关系(θm=r-1θw),有
30、
31、其中,r是表示电机电阻的对角矩阵,la是表示电机电感的对角矩阵,kb是表示电机反电动势的对角矩阵。
32、整理等式(9),即为电压控制的完整机器人电动力学模型
33、
34、其中d(q)是惯性矩阵,是非线性项,h(q)是势能项,vl是未建模动态,
35、
36、
37、
38、
39、步骤4,设计电压控制自适应律;
40、等式(10)左边加减和nvc,结合步骤1,机器人的完整电动力学方程改写为:
41、
42、其中ec=vc-v,
43、电压的控制律设计为:
44、
45、其中是神经网络控制器的自适应补偿控制项,目的是抵消系统的非线性扰动g=-nec+f+h+vl对系统的影响,k4是控制增益。
46、步骤5,设计神经网络及更新方式
47、使用单层神经网络拟合函数g=-nec+f+h+vl。即其中是g的近似函数、ωa为自适应权重、∈为估计误差。神经网络输入向量神经网络结构包括一个输入层和一个输出层:输入层有4个神经元,对应输入向量中的元素;输出层有1神经元,代表ωa的自适应律为
48、
49、本发明的第二个方面涉及一种基于神经网络的非完整约束轮式机器人自适应轨迹跟踪控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现本发明的基于神经网络的非完整约束轮式机器人自适应轨迹跟踪控制方法。
50、本发明的第三个方面涉及一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,实现本发明的基于神经网络的非完整约束轮式机器人自适应轨迹跟踪控制方法。
51、本发明的优点是:电压控制策略相对于转矩控制策略的串级双闭环控制结构,采用单闭环控制结构。这一设计在实现更为灵活实时响应的同时,提高系统控制的精度及效率。此外,利用神经网络拟合系统的非线性因素,以克服复杂系统动力学建模的不确定性,增强系统的抗干扰能力,提高控制系统的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198211.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表