一种响应速度快且鲁棒性强的风机控制方法及系统与流程
- 国知局
- 2024-07-31 23:42:37
本发明涉及风机控制,尤其涉及一种响应速度快且鲁棒性强的风机控制方法及系统。
背景技术:
1、在现代工业生产中,风机的应用范围广泛,涵盖了电力、化工、冶金、建材等多个领域。风机控制系统作为关键环节,其性能直接影响着整个系统的运行效率和稳定性。然而,在实际的运行过程中,风机的控制面临着诸多挑战。其中,系统的不确定性和时滞特性是影响风机控制性能的两个主要因素。
2、传统的风机控制方法通常采用pid(比例-积分-微分)控制策略。这种方法虽然在一定程度上能够提高系统的控制性能,但难以应对系统的不确定性和时滞特性。这是因为pid控制方法对系统的模型精度要求较高,而在实际运行中,系统模型往往难以精确描述。此外,pid控制方法对时滞特性的敏感度也较低,难以确保系统在实时变化的环境下保持稳定。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。
3、因此,本发明提供了一种响应速度快且鲁棒性强的风机控制方法及系统,能够解决背景技术中提到的问题。
4、为解决上述技术问题,本发明提供如下技术方案,一种响应速度快且鲁棒性强的风机控制方法,包括:
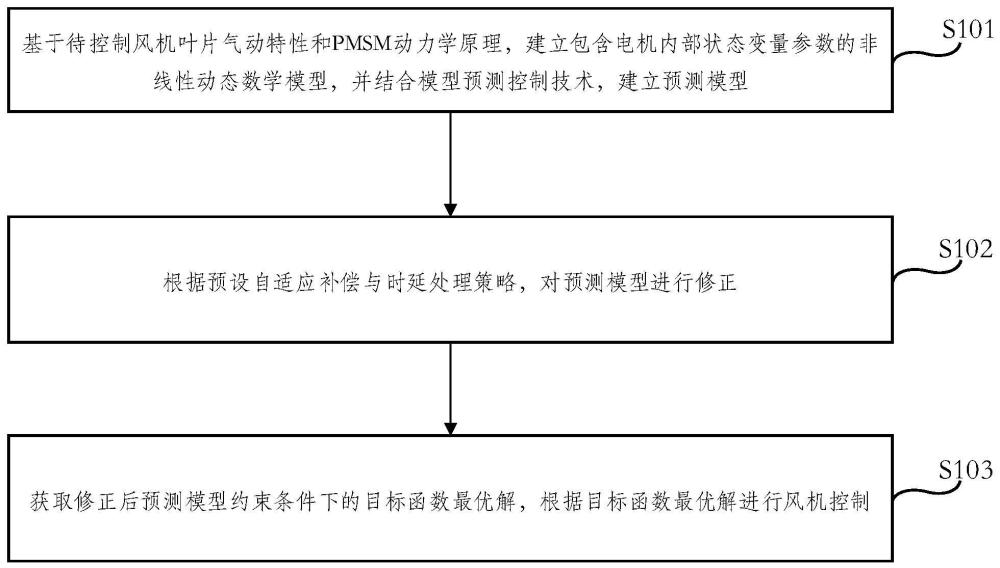
5、基于待控制风机叶片气动特性和pmsm动力学原理,建立包含电机内部状态变量参数的非线性动态数学模型,并结合模型预测控制技术,建立预测模型;
6、根据预设自适应补偿与时延处理策略,对所述预测模型进行修正;
7、获取修正后预测模型约束条件下的目标函数最优解,根据所述目标函数最优解进行风机控制。
8、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述基于待控制风机叶片气动特性和pmsm动力学原理,建立包含电机内部状态变量参数的非线性动态数学模型的步骤中所述待控制风机叶片气动特性包括叶片攻角、升力系数、阻力系数、风速、风速变化率、叶片摆振角度;
9、所述非线性动态数学模型包括风能转换为机械转矩,表示为:
10、
11、其中,v是风速,是风速的变化率,α是叶片攻角,β是叶片摆振角度,cp是升力系数,cd是阻力系数,f表示风能转换为机械能的函数;
12、所述非线性动态数学模型还包括转子运动方程:
13、
14、其中,表示风速变化对转矩波动影响的一个函数项,ff是根据环境温度tamb和电机内部温度θm计算的摩擦力损失,j表示转子转动惯量,表示转子角速度变化率,t表示机械转矩,b表示阻尼系数,ωr表示转子角速度,kt表示扭矩常数,iq表示q轴电流分量;
15、所述非线性动态数学模型还包括磁链幅值方程:
16、
17、其中,lm(tm)是随电机温度tm变化的磁链惯量常数,ra(tm)是随电机温度变化的等效磁阻,表示磁链幅值变化率,λ表示磁链幅值,p表示电机的极对数,ψf表示永磁体磁通;
18、所述非线性动态数学模型还包括d-q轴电流方程:
19、
20、其中,vq以及vd表示d-q轴电压分量,kd以及ki表示控制器比例,e表示速度误差,e=wref-wr,wref表示目标转速,wref表示实际转速,ld表示d轴电感,lq表示q轴电感,rs(tm)为常数,表示定子电阻随电机内部温度的变化。
21、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述结合模型预测控制技术,建立预测模型包括:
22、将所述非线性动态数学模型转化为离散时间模型;
23、基于离散化后的非线性系统模型,建立未来多个时间步长的状态和输入变量预测模型。
24、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述预设自适应补偿与时延处理策略包括:
25、设定一个基于扩展卡尔曼滤波器的状态预测模型来实时估计时延τ(t),考虑其可能随时间变化的特性:
26、
27、其中,是时滞的估计值,u(t)是控制输入,y(t)是系统输出,z(t)是其他影响时滞的可观测变量,w(t)是噪声项;
28、在mpc控制器中引入修正后的时滞项进行优化,优化项表示如下:
29、
30、其中,ucmd(t)表示实际发送给电机控制器的控制指令,在考虑时滞补偿后的最终控制输入,u*表示mpc计算出的理想控制信号;
31、利用深度神经网络对系统的非线性动态特性及参数变化进行建模和补偿,训练神经网络以预测下一时刻的状态变量,并根据预测误差调整控制如下输入:
32、δu(t)=h(y(t),u(t),θnn)
33、其中,δu(t)是添加到理想控制输入u*(t)上的自适应补偿项,θnn是神经网络的权重和偏置。
34、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述目标函数包括:
35、所述目标函数表示为:
36、
37、其中,xi和ri分别代表第i时刻的状态向量和参考状态,ui表示控制输入,qi是针对不同时间步长的状态误差权重矩阵,根据实际需求调整其对各状态变量的关注程度,ri是控制输入的权重矩阵,用来权衡不同输入信号的控制成本,y是控制输入变化率的惩罚系数,用于限制连续控制输入之间的突变,s是输入变化率惩罚矩阵,qi≥0,ri≥0,s≥0。
38、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述获取修正后预测模型约束条件下的目标函数最优解,根据所述目标函数最优解进行风机控制还包括:
39、所述约束条件表示为:
40、状态约束:xmin≤xi≤xmax;
41、控制输入约束:umin≤ui≤umax;
42、输入变化率约束:δumin,i≤ui-ui-1≤δumax,i;
43、自适应补偿与时延处理约束:
44、
45、其中,ucmd(t)表示实际发送给电机控制器的控制指令,在考虑时滞补偿后的最终控制输入,u*表示mpc计算出的理想控制信号。
46、作为本发明所述的响应速度快且鲁棒性强的风机控制方法的一种优选方案,其中:所述约束条件表示为:还包括:
47、风机转速限制:ωmin≤ωr(t)≤ωmax,ωr(t)表示风机实时转速;
48、功率极限约束:pmin≤pgen(t)≤pmax,pgen(t)表示风机实时功率;
49、温度阈值约束:电机温度tm不超过安全上限。
50、一种响应速度快且鲁棒性强的风机控制系统,其特征在于,包括:
51、模型建立模块,用于基于待控制风机叶片气动特性和pmsm动力学原理,建立包含电机内部状态变量参数的非线性动态数学模型,并结合模型预测控制技术,建立预测模型;
52、模型修正模块,用于根据预设自适应补偿与时延处理策略,对所述预测模型进行修正;
53、风机控制模块,用于获取修正后预测模型约束条件下的目标函数最优解,根据所述目标函数最优解进行风机控制。
54、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上所述的方法的步骤。
55、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
56、本发明的有益效果:本发明提出一种响应速度快且鲁棒性强的风机控制方法及系统,基于待控制风机叶片气动特性和pmsm动力学原理,建立包含电机内部状态变量参数的非线性动态数学模型,并结合模型预测控制技术,建立预测模型;根据预设自适应补偿与时延处理策略,对所述预测模型进行修正;获取修正后预测模型约束条件下的目标函数最优解,根据所述目标函数最优解进行风机控制。本发明提供了一种响应速度快且鲁棒性强的风机控制方法及系统,通过建立非线性动态数学模型、采用模型预测控制技术、自适应补偿与时延处理策略,有效提高了风机的控制性能。在实际应用中,本发明的方法可以实现快速稳定的控制效果,具有较高的鲁棒性和广泛的应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198206.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。