一种适用于阵列望远镜编队控制的策略最优化方法与流程
- 国知局
- 2024-07-31 23:42:26
本发明属于阵列望远镜编队控制,涉及一种适用于阵列望远镜编队控制的策略最优化方法。
背景技术:
1、阵列望远镜是指由数个(乃至更多)分布式望远镜单元综合而成的观测系统。它以各单元之间的间隔,提供各种基线长度,对探测目标的频谱进行尽可能宽的覆盖。阵列望远镜可以是地基的,也可以是天基的,本发明主要涉及天基阵列望远镜。阵列望远镜由于从若干分布式望远镜单元建立而成,天然具备分布式特征。空间的阵列望远镜,在这个基础上,为了达到光学干涉观测的目的,还必须对指向、光程等元素进行更为精细的控制。其中存在姿轨耦合、力光耦合、力热耦合等多种耦合作用,涉及多物理效应程度深、范围大。加之空间环境具有一定变化性,其任务仿真系统必须精确、高效地描述系统行为,天然具有复杂性。
2、阵列望远镜编队控制的难点可主要归结为以下各方面:
3、1.控制精度、稳定度要求高。针对指向、编队间距等控制等要求,可接入下一级控制,但是为了进行稳定衔接,需要位置精度达到毫米级,共指向精度也有一定要求。其控制稳定性也需要符合下一级控制能够接受的范围。
4、2.控制开销重要。本阵列望远镜的预设任务是对系外宜居行星进行成像观测,由于被观测目标距离远,辐射弱,需要相对较长的稳定时间和凝视时间,例如一个典型的工作天区需要的凝视时间可达三周。因此,既要保证稳定的高精度编队,也要保证低开销的控制动作。
5、3.扰源繁多,非线性外力多,控制律难以确定。其复杂性导致传统的gnc方法遭遇困难。
6、4.分布式系统本性,要求实现协同控制。
7、对于协同控制方法,目前已有基于空间解耦的单输入单输出线性控制方法、磁浮平台的主从协同及干扰补偿方法、基于超静平台的隔振与指向综合控制方法等。然而,这些方法都没有考虑多体卫星姿轨耦合控制场景。因而,需要寻找能够兼顾控制开销与控制精度的适用于阵列望远镜这一分布式光学系统的编队控制方法,且方法应考虑姿轨耦合等固有的复杂性。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种适用于阵列望远镜编队控制的策略最优化方法,解决分布式阵列望远镜系统协同控制乃至实现稳定光学干涉观测的问题。
2、本发明解决技术的方案是:一种适用于阵列望远镜编队控制的策略最优化方法,所述的阵列望远镜以多个航天器为载体;所述方法包括以下步骤:
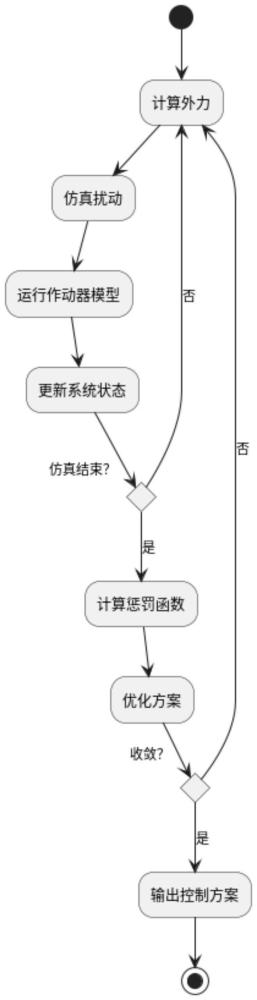
3、步骤1、根据阵列望远镜轨道力学环境,建立外力模型,外力模型的输出为天体引力摄动、高阶引力项摄动、光压、器间自引力之和;
4、步骤2、根据已知的阵列望远镜系统方案,建立扰动模型,所述扰动包括外来扰动和内生扰动;
5、步骤3、根据预设的编队作动器方案,建立作动器模型,用于输出作动器在每个时序下的状态参数;
6、步骤4、根据外力模型的输出、扰动模型的输出、作动器模型的输出,利用牛顿定律建立阵列望远镜动力学模型,输出各航天器的动力学信息;
7、步骤5、根据阵列望远镜动力学模型当前步及历史各步输出的动力学信息计算控制残差、抖动、控制成本、uv覆盖,作为优化目标,建立多目标优化模型;
8、步骤6、对多目标优化模型进行求解,生成最优解对应的作动器动作行为施加到作动器模型上,更新作动器的状态参数;
9、步骤7、使用更新的作动器状态参数重新进行阵列望远镜动力学求解,进而计算新的优化目标值,重复步骤6~步骤7,直到达到预设收敛条件,输出此时得到的作动器动作方案作为阵列望远镜编队控制的最优策略。
10、进一步的,所述光压的计算方法为:
11、获取输入量:入射光的动量流密度f,器表面各个微元dσ及其外法向单位矢量光入射方向及反射方向反射系数r,按照下式计算航天器所受光压:
12、
13、进一步的,所述器间自引力的计算方法为:
14、设置第一预设阈值,首先使用自引力的粗略计算方法计算器间自引力,当计算得到的器间自引力大于第一预设阈值时,使用自引力的精细计算方法重新计算器间自引力;
15、其中,所述自引力的粗略计算方法表示如下:
16、
17、式中g是万有引力常数,mi为第i航天器质量,mj为第j航天器质量,rij是从第i航天器位置指向第j航天器位置的矢量,rij为矢量rij的大小;
18、所述自引力的精细计算方法表示如下:
19、
20、式中,ri为第i航天器位置矢量,rj为第j航天器位置矢量,rij=rj-ri;ωi为第i航天器所占空间,其质量密度为ρi;ωj为第j航天器所占空间,其质量密度为ρj。
21、进一步的,所述建立扰动模型,包括:
22、建立各扰源的功率谱密度模型p(ω),其中ω是时间圆频率;
23、将扰动时间序列的理想形式离散化为其中,a是扰动物理量;θ是在[0,2π]上均匀分布的随机相角,对每个ω或频率下标j不同;扰动模型的频率范围从ω1到ω2;n是离散化对频率域分割的份数;频率点功率谱函数值pj=p(ωj);离散化因数f′使得总功率在白噪声情况下一致,初始相角利用随机数发生器抽取[0,2π]上均匀分布的n个样本。
24、进一步的,所述建立作动器模型,包括:
25、定义数据域列表包括作动器的状态量、输出冲量;
26、从预设的编队作动器方案中获取开机或关机指令作为当前的输入;
27、利用作动器的输出曲线,获取作动器的自身温度改变作为作动器状态的更新依据,获取作动器的输出冲量作为作动器模型的输出。
28、进一步的,所述建立阵列望远镜动力学模型,包括:
29、借助系统方案建立阵列望远镜的动力学数值模型,其中包括外力、扰动源、作动器模型;将外力模型在当前状态下算得的外力值作为阵列望远镜所受外力,将扰动源模型的扰动时间序列插值为当前时间的各扰动源扰动值,根据控制策略,由作动器模型给出作动器状态的变化及输出力、输出力矩;根据以上的各力、力矩,使用牛顿定律更新阵列望远镜的位置、姿态。
30、进一步的,所述建立多目标优化模型,形式如下:
31、
32、其中,位置的控制残差的标准差为σr,指标值为σr0,权重为wr;速度的控制残差的标准差为σv,指标值为σv0,权重为wv;抖动加速度的最大值为a,指标值为a0,权重为wa;第i次机动的燃料消耗为ci,总消耗的指标值为c,权重为wc,n′为总机动次数;uv区域的覆盖率r∈[0,1],权重为wuv。
33、进一步的,所述对多目标优化模型进行求解,包括:
34、设定多目标优化模型中的各项权重值范围;
35、使用神经网络等最优化方法进行多目标优化模型的最优化计算,得到使多目标优化模型取值最小的一组优化目标作为最优解;
36、使用阵列望远镜仿真系统对最优解进行仿真检验,生成最优解对应的作动器动作方案。
37、进一步的,所述预设收敛条件包括以下任一种情况:
38、(1)达到预设的最大迭代次数;(2)当前迭代次数的优化目标与上一次迭代的优化目标的差值小于第二预设阈值;(3)当前迭代次数的多目标优化模型输出值与上一次迭代的多目标优化模型输出值的差值小于第三设定阈值。
39、本发明与现有技术相比的有益效果是:
40、(1)本发明由于采用分布式架构,实现分布式阵列望远镜系统协同控制的单星级仿真,相比现有技术中的集中仿真方法,在提供通信中间件的前提下,实现了各器控制效果的独立仿真;
41、(2)本发明通过最优化方法,实现复杂、间接控制目标下的最优化控制设计。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表