一种分布式水面无人艇预设时间编队协同控制方法及系统
- 国知局
- 2024-07-31 23:42:14
本发明属于控制系统,尤其涉及一种分布式水面无人艇预设时间编队协同控制方法及系统。
背景技术:
1、近年来,随着航海技术和海洋工程领域的快速发展,研究者们受到自然界中鸟类成群迁徙、鱼类成群游动等各种生物群体活动的启发,开始将集群编队策略应用到多水面无人自主系统中。多水面无人艇编队相较于单艇具有分布式、自适应和灵活性等多种优点,能够适应海上日益复杂的任务需求。因此,水面无人艇编队控制技术已经成为海洋工程领域的热点问题之一。从控制方法的角度来看传统的编队控制一般采用集中式控制,但是集中式控制共用一个中央控制器,系统的容错性和扩展性都受到极大限制,这不利于大规模编队控制的实施。与集中式控制相比,分布式控制分担了计算压力,且编队中某个个体出现故障不会致使整个系统崩溃,系统鲁棒性和可靠性更高。此外,目前多船编队控制的研究主要是针对系统无穷时间收敛的控制问题,即系统从初始状态收敛到平衡点的时间无穷大,这将无法胜任有快速收敛需求的控制任务。有限时间控制由于可突破收敛的渐进性,同时具有更好的控制性能和出色的鲁棒性,因而广泛应用于海上无人系统的编队控制问题。值得注意的是,有限时间控制技术的收敛时间依赖于系统的初始状态,这使得有限时间的应用受到了一定限制。为解决有限时间控制方法对系统初值的依赖,学者们提出了固定时间控制方法。固定时间控制技术不受系统初值的影响,但是其收敛时间与控制参数之间关系复杂,不能直接表示为系统的某个可调参数,不利于实际应用。为解决上述问题,预设时间稳定概念受到关注,其收敛时间排除了对系统初值的依赖、且仅由一个特定的控制参数显式决定。因此,与有限时间控制技术和固定时间控制技术不同的是,预设时间控制技术的收敛时间可以由用户任意设置,这也直接决定了预设时间控制技术对于解决具有收敛时间约束的非线性控制问题具有显著优势。因此,面对海上日益复杂的任务需求,具有预设时间收敛的无人艇分布式编队协同控制问题是一个具有挑战性且值得研究的问题。
2、通过上述分析,现有技术存在的问题及缺陷为:限时间控制技术的收敛时间依赖于系统的初始状态,固定时间控制方法收敛时间与控制参数之间关系复杂,不能直接表示为系统的某个可调参数,不利于实际应用。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种分布式水面无人艇预设时间编队协同控制方法及系统。
2、本发明是这样实现的,一种分布式水面无人艇预设时间编队协同控制方法,包括:
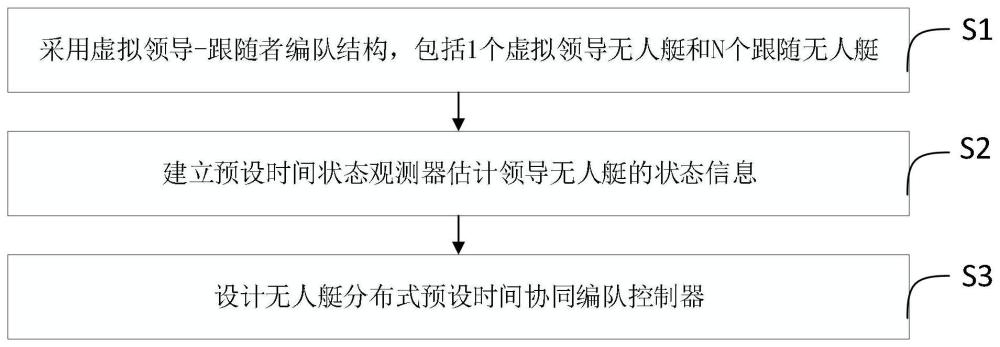
3、s1,采用虚拟领导-跟随者编队结构,包括1个虚拟领导无人艇和n个跟随无人艇;
4、s2,建立预设时间状态观测器估计领导无人艇的状态信息;
5、s3,设计无人艇分布式预设时间协同编队控制器。
6、进一步,s1中,第i个跟随无人艇的运动和动力学模型建立如下:
7、
8、其中,和分别表示无人艇的位姿向量和速度向量,表示计算机指令控制输入,j(ψi)是从船舶附体坐标系到大地惯性坐标系的转换矩阵,γ(τi)=sat(τi)=[sat(τiu),sat(τiv),sat(τir)]t表示实际施加的控制输入,其中sat(τi,k)=sign(τi,k)×min{|τi,k|,τmax},k=u,v,r,τmax代表控制输入的最大值,表示外部环境干扰,mi,ci(vi)和di(vi)分别代表惯性矩阵、科里奥利向心矩阵和水动力阻尼矩阵,具体表示如下:
9、
10、进一步,第i个跟随无人艇的动态可进行如下描述:
11、
12、其中,fi(χ1i,χ2i)=si(ri)χ1i-j(ψi)mi-1(ci(vi)+di(vi))jt(ψi)χ2i,gi(χ1i)=j(ψi)mi-1。
13、进一步,s2具体包括:
14、首先,定义一个时变时间函数:
15、
16、其中,h>2可以用户自定义参数;
17、求导数可得
18、
19、接着,设计如下预设时间状态观测器
20、
21、其中,αk,βk,k=1,2,3均是正的常数,ξ1i和ξ2i分别是ηl和的估计值,并且有
22、进一步,s3中,预设时间编队跟踪控制器构造如下:
23、
24、其中,和0<ι2<0.5均是正的常数,λi=1+||χ1i||+||χ1i||2,表示预设的时间;
25、接着,设计如下自适应补偿律:
26、
27、其中,0<tx≤tc和k2>0是常数,和δτi=γ(τi)-τi,所设计的自适应律χa能够补偿τi和γ(τi)之间的差值。
28、本发明的另一目的在于提供一种应用所述分布式水面无人艇预设时间编队协同控制方法的分布式水面无人艇预设时间编队协同控制系统,包括:
29、编队结构形成模块,用于采用虚拟领导-跟随者编队结构,包括1个虚拟领导无人艇和n个跟随无人艇;
30、状态信息观测模块,用于建立预设时间状态观测器估计领导无人艇的状态信息;
31、编队控制器设计模块,用于设计无人艇分布式预设时间协同编队控制器。
32、本发明的另一目的在于提供一种计算机设备,计算机设备包括存储器和处理器,存储器存储有计算机程序,计算机程序被处理器执行时,使得处理器执行所述的水面无人艇预设时间编队协同控制方法的步骤。
33、本发明的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时,使得处理器执行所述的水面无人艇预设时间编队协同控制方法的步骤。
34、本发明的另一目的在于提供一种信息数据处理终端,信息数据处理终端用于实现所述的水面无人艇预设时间编队协同控制系统。
35、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
36、第一,与传统的集中式和分散式编队控制方法不同,本发明采用分布式编队控制方法。与集中式控制相比,分布式控制分担了计算压力,且编队中的任意个体出现故障不会导致整个编队系统崩溃,鲁棒性更好。与分散式控制相比,分布式控制可以通过局部控制器之间的协作达到整体最优。此外,分布式编队还具有扩展性强、可靠性高等优点。
37、本发明采用虚拟领导-跟随编队结构,即设置一个虚拟的领导者无人艇,其余无人艇作为跟随者,通过规划领航船的航行轨迹,跟随无人艇则通过特定控制率以及期望的角度和距离对领导无人艇进行轨迹跟踪。由于在实际应用中,使得所有跟随者都能及时获取领导者的状态信息存在困难,因此本发明假设只有部分跟随无人艇能够获取领导无人艇的航行状态信息,因此设计预设时间状态观测器估计领导者的状态信息,使得跟随者能够精确跟上领导者并形成预设编队。
38、设计一种分布式无人艇预设时间协同编队控制算法,该算法能够在存在外界扰动和输入饱和情况下,实现指定时间内的高精度编队跟踪控制,且系统的稳定时间上界可由一个控制增益预设设定。
39、第二,鉴于多无人艇编队控制相关发明专利较少,但是随着海上任务复杂性和要求越来越高,设计编队控制算法时需要考虑更高的技术指标,如编队规模的可扩展性、编队收敛的时效性等。因此,本发明针对多无人艇编队快速机动性能,提出一种分布式预设时间编队控制方法,该方案能够使得整个编队跟踪系统在一个预先由用户自定义的时间内实现收敛,具有较高的时效性和机动性,并且与现有技术相比,具有如下优点:
40、专利cn115617039a提出一种分布式仿射无人艇编队控制方法,但是该方法的收敛时间不能由人为预先设置。而本发明的系统稳定时间可以由人为预先设置,这对于一些对于收敛时间要求较高的复杂系统具有较大的应用价值和较明显的优势。
41、专利cn202110426684.1提出一种有限时间收敛的多无人艇编队控制方法,但是众所周知,有限时间控制方法存在天然缺陷,即有限时间控制理论的系统收敛时间受初始状态影响较大,因此若初始状态选取不当,则会使得系统收敛时间较大。而本发明的预设时间控制方法的收敛时间则不受系统初始状态的影响。
42、专利cn202110144673.4提出一种固定时间的多无人艇编队控制方法,但是由于固定时间控制理论的收敛时间与多个控制增益有关,且固定时间控制方法给出的系统收敛时间的上界是一个对系统收敛时间的非常保守的估计值,它并不是系统收敛时间的上界,也不能完全反应系统的实际收敛时间,这导致系统的瞬态响应质量低于必要的结果。
43、本发明的技术方案填补了国内外业内技术空白:本发明首次提出一种分布式无人艇预设时间编队跟踪控制方法,使得无人艇编队跟踪控制系统能够在一个人为预先设置的时间内收敛,这极大地提高了无人艇编队控制的时效性和机动性。对某些收敛时间要求较高的复杂系统如航天器编队控制、无人机编队以及无人艇编队控制具有较大的现实意义和商业价值。
44、第三,本发明实施例提供的分布式水面无人艇预设时间编队协同控制方法及系统,显著的技术进步主要体现在以下几个方面:
45、1.虚拟领导-跟随者编队结构的创新应用:
46、通过引入虚拟领导-跟随者编队结构,本发明实现了对多个无人艇的协同控制。这种结构不仅提高了编队的稳定性和灵活性,而且能够更好地适应复杂的水面环境。相较于传统的编队方式,虚拟领导者的存在使得整个编队能够更好地保持队形,并在面对外部干扰时具有更强的鲁棒性。
47、2.预设时间状态观测器的引入:
48、本发明通过建立预设时间状态观测器,实现对领导无人艇状态信息的精确估计。这一技术进步使得无人艇编队能够在预设的时间内达到期望的编队状态,提高了编队的响应速度和协同效率。同时,状态观测器的引入也增强了系统对领导无人艇状态变化的敏感性,提高了编队的自适应能力。
49、3.分布式预设时间协同编队控制器的设计:
50、本发明设计了分布式预设时间协同编队控制器,实现了对多个无人艇的协同控制。这种控制器能够充分利用无人艇之间的通信和协作能力,使得整个编队能够在预设时间内快速、准确地达到期望的编队状态。相较于传统的集中式控制方法,分布式控制不仅提高了系统的可靠性和容错性,而且降低了通信成本和维护难度。
51、4.系统化和模块化的设计:
52、本发明实施例提供的分布式水面无人艇预设时间编队协同控制系统采用模块化的设计方式,包括编队结构形成模块、状态信息观测模块和编队控制器设计模块。这种设计使得系统更加易于扩展和维护,同时也提高了系统的可重用性和灵活性。
53、综上所述,本发明实施例提供的分布式水面无人艇预设时间编队协同控制方法及系统,通过引入虚拟领导-跟随者编队结构、预设时间状态观测器和分布式预设时间协同编队控制器等创新技术,显著提高了无人艇编队的协同控制性能,为水面无人艇的协同应用提供了新的解决方案。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198163.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。