一种基于云平台的桥梁无人巡检车控制系统的制作方法
- 国知局
- 2024-07-31 23:42:18
本技术涉及桥梁巡检设备,特别涉及一种基于云平台的桥梁无人巡检车控制系统。
背景技术:
1、桥梁在建设和运营期间都需要进行大量的检修工作,以保证建设质量和运营安全。对桥梁工程进行客观准确的例行检查,是保证在建桥梁工程质量的必要环节,同时也是了解桥梁健康状况、查清病害程度与原因的重要手段。
2、传统的桥梁例行巡检环节,需要作业人员登上桥梁检修车进行人工目视检查,不仅检测效率低,还会由于个人主观因素出现漏检和误检的情况,影响桥梁检修精度;同时每次桥梁检查过程无法保存记录巡检数据,同时也无法与同历次检查状况进行比较,不能为病害发展程度和产生原因提供一定的数据支持。
3、现有技术中,还有通过人工去采集桥梁定点图像传输至后台,利用图像识别进行桥梁病害分析,该种方式还是依赖人工去采集数据,效率不高,且采集的数据存在人为干扰因素。
技术实现思路
1、为解决上述问题,本实用新型提供了一种基于云平台的桥梁无人巡检车控制系统,实现了桥梁的自动化巡检,无需依赖人工,提高了巡检效率,精确并规范了桥梁数据采集点,保证了巡检数据的精确性,同时能够快速的将病害分析数据进行同步上传。
2、本实用新型提供了一种基于云平台的桥梁无人巡检车控制系统,具体技术方案如下:
3、包括巡检车主体,移动云台,摄像装置,标签阅读器模块以及云服务器;
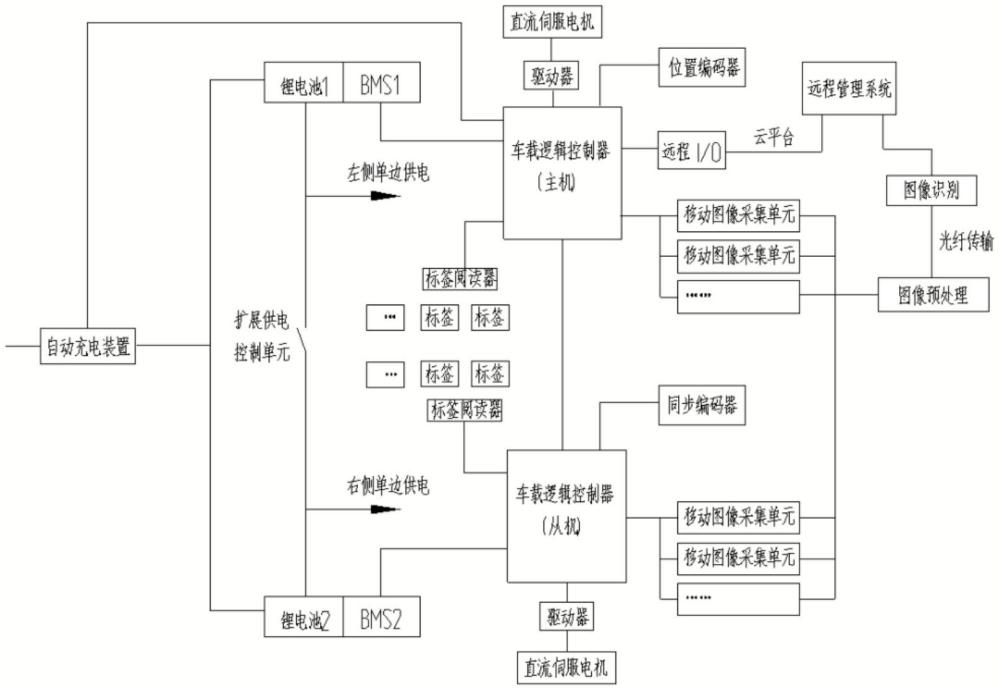
4、所述摄像装置部署在所述移动云台上,所述巡检车主体上部署有车载控制系统,所述车载控制系统的控制架构采用由两个处理器组成的主从控制架构;
5、所述处理器与所述摄像装置通过线缆连接,获取采集的图像数据;所述处理器与所述移动云台的驱动模块连接,控制所述移动云台沿布设轨道移动;
6、所述标签阅读器模块与所述处理器连接,所述处理器还连接有编码器模块;所述处理器还连接有电源单元;
7、主处理器通过i/o接口连接有远程通信模块,通过所述远程通信模块与所述云服务器远程连接。
8、进一步的,所述电源单元包括两组电池和对应的bms模块,所述电池通过对应的所述bms模块与所述处理器连接。
9、进一步的,两组所述电池的供电输出端之间设有电流通路,所述电流通路上设有扩展供电控制开关,所述扩展供电控制开关与所述处理器控制连接。
10、进一步的,所述扩展供电控制开关采用接触器。
11、进一步的,所述电池采用锂电池。
12、进一步的,所述处理器还连接有驱动器,通过所述驱动器连接直流伺服电机。
13、进一步的,所述摄像装置上还设有防尘罩,所述防尘罩通过驱动电机与所述处理器控制连接,根据所述处理器的电信号控制所述防尘罩开合。
14、进一步的,所述处理器采用plc或单片机。
15、本实用新型的有益效果如下:
16、1、基于云服务器远程控制巡检车,实现了桥梁的自动化巡检,无需依赖人工,提高了巡检效率,通过巡检车上部署的摄像装置采集桥梁图像数据,进行识别分析,保证了巡检数据的精确性,同时能够快速的将病害分析数据进行上传同步,巡检车的车载控制系统通过主两个处理器构成主从控制架构,将各功能单元模块化集成,可靠性高,提高了系统的可用性。
17、该控制系统从电源到控制器都有较大程度的功能冗余,可靠性高,有利于提高无人控制系统的可用性。
18、2、巡检车的驱动轴上设有编码器,通过编码器的脉冲信号获取车体的行动距离,巡检车外侧还设有标签阅读器模块,基于射频信号获取轨道上设置的标签内容,并反馈给处理器,消除巡检车的行走误差,实现精准可靠的位置定位。
19、3、云服务器的远程控制指令与采集的图像数据采用不同网络媒介进行传输,保证了远程控制指令传输的可靠性,避免图像大规模传输时挤占控制指令传输。
技术特征:1.一种基于云平台的桥梁无人巡检车控制系统,其特征在于,包括巡检车主体,移动云台,摄像装置,标签阅读器模块以及云服务器;
2.根据权利要求1所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述电源单元包括两组电池和对应的bms模块,所述电池通过对应的所述bms模块与所述处理器连接。
3.根据权利要求2所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,两组所述电池的供电输出端之间设有电流通路,所述电流通路上设有扩展供电控制开关,所述扩展供电控制开关与所述处理器控制连接。
4.根据权利要求3所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述扩展供电控制开关采用接触器;
5.根据权利要求4所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述电池采用锂电池。
6.根据权利要求1所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述处理器还连接有驱动器,通过所述驱动器连接直流伺服电机。
7.根据权利要求1所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述摄像装置上还设有防尘罩,所述防尘罩通过驱动电机与所述处理器控制连接,根据所述处理器的电信号控制所述防尘罩开合。
8.根据权利要求1-7任一所述的基于云平台的桥梁无人巡检车控制系统,其特征在于,所述处理器采用plc或单片机。
技术总结本技术公开了一种基于云平台的桥梁无人巡检车控制系统,包括巡检车主体,移动云台,摄像装置,标签阅读器模块以及云服务器;摄像装置部署在移动云台上,巡检车主体上部署有车载控制系统,车载控制系统的控制架构采用由两个处理器组成的主从控制架构;处理器与摄像装置通过线缆连接,获取采集的图像数据;处理器与移动云台的驱动模块连接,控制移动云台沿布设轨道移动;处理器还连接有编码器模块和电源单元;主处理器通过I/O接口连接有远程通信模块,通过远程通信模块与云服务器远程连接。本技术基于主从处理器控制架构,通过云服务器完成图像识别处理和远程指令控制,实现了桥梁的自动化巡检,提高了巡检效率。技术研发人员:张兴豫,杨兵,邱廷琦,吴明龙受保护的技术使用者:成都市新筑交通科技有限公司技术研发日:20231204技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198173.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表