一种核应急机器人的自主路径规划方法及系统与流程
- 国知局
- 2024-07-31 23:42:33
本发明涉及核安全,具体涉及一种应急机器人的自主路径规划方法及系统。
背景技术:
1、辐射探测技术在核应急、核安全、核设施退役处置等领域中占有重要的地位。核应急机器人代替人类进入核事故应急现场,可以降低救援人员的核辐射暴露风险。现有的核应急机器人多采用实时遥控,将传感器数据回传到遥控端,由操作员分析、判断后下达动作指令。这种核应急机器人的工作效果严重依赖操作员的经验和水平,现场勘察、辐射监测等核应急任务需要常态化不间断作业,这给操作员带来严重的工作负荷。
2、现有的路径规划技术可以辅助核应急机器人导航、避障,安全快速地抵达目标地点。然而,这种路径规划技术需要指定目的地和途径点。核应急机器人的作业区域和关注位置仍然依赖操作员划定,对事故区域不熟悉的操作员很难规划出高效的作业区域和移动路线。
技术实现思路
1、针对现有技术存在的上述不足,本发明要解决的技术问题是:如何提供一种能够自主感知辐射环境、智能识别核应急任务的作业区域和关键节点,并能够根据任务自主规划路径的核应急机器人的自主路径规划方法及系统。
2、为了解决上述技术问题,本发明采用如下技术方案:
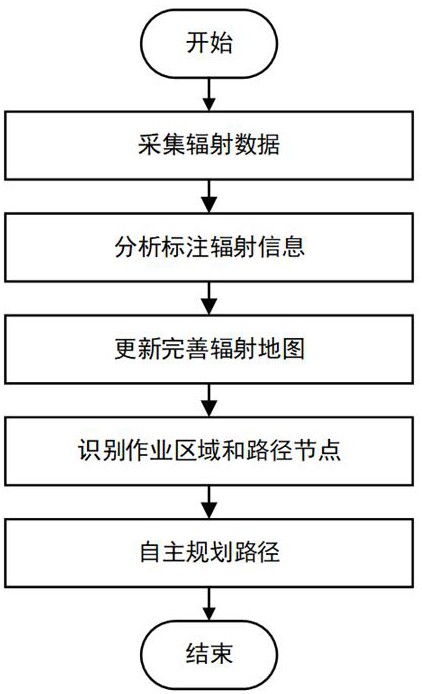
3、一种核应急机器人的自主路径规划方法,包括以下步骤:
4、步骤1)建立环境地图,采集环境中的辐射数据;
5、步骤2)结合环境地图分析辐射数据,将辐射数据标注在环境地图上,以得到具有辐射数据信息的辐射地图;
6、步骤3)更新完善辐射地图;
7、步骤4)根据核应急机器人的任务信息和辐射地图确定核应急机器人的作业区域、路径节点和线路类型;
8、步骤5)根据核应急机器人的作业区域、路径节点和线路类型确定核应急机器人的运动路径。
9、一种核应急机器人的自主路径规划系统,用于实现上述核应急机器人的自主路径规划方法,包括slam系统、导航系统和通信控制系统,还包括辐射感知系统、融合建图系统和核应急任务规划系统;
10、所述辐射感知系统的数据输出端与所述融合建图系统的数据输入端通信连接,所述辐射感知系统采集环境中的辐射数据并发送给所述融合建图系统;
11、所述slam系统的数据输出端同时与所述融合建图系统的数据输入端和所述导航系统的数据输入端通信连接,所述slam系统实时构建环境地图并定位核应急机器人位置发送到所述融合建图系统和所述导航系统;
12、所述融合建图系统的数据输出端与所述核应急任务规划系统的数据输入端通信连接,所述融合建图系统从所述辐射感知系统获取辐射数据,并结合从所述slam系统获取的环境地图信息建立包含有辐射数据的辐射地图发送给所述核应急任务规划系统;
13、所述通信控制系统的数据输出端与所述核应急任务规划系统的数据输入端通信连接,所述通信控制系统发送控制指令到所述核应急任务规划系统;
14、所述核应急任务规划系统的数据输出端与所述导航系统的数据输入端通信连接,所述核应急任务规划系统根据从所述融合建图系统获取的辐射地图和从所述通信控制系统获取的控制指令确定核应急任务信息并发送给所述导航系统;
15、所述导航系统根据所述核应急任务规划系统发送的核应急任务信息和所述slam系统发送的环境地图确定核应急机器人的导航路线,以引导核应急机器人安全移动。
16、优选的,所述辐射感知系统包括辐射传感器,所述辐射传感器包括伽马探测器、粒子计数器、伽马相机。
17、优选的,所述融合建图系统建立的辐射地图上的辐射数据包括辐射强度的空间分布、辐射物理场、放射源、放射性元素类型、沾染放射性物质的物体、放射性物质的散布区域。
18、优选的,所述融合建图系统采用深度神经网络算法模型、机器学习方法或脉冲神经网络算法模型建立辐射地图。
19、优选的,所述通信控制系统发送的控制指令包括汇报核应急信息、自主辐射监测、自主核污染区域探索、自主放射源搜寻。
20、优选的,所述核应急任务规划系统确定的核应急任务信息包括核应急任务区域、执行核应急任务的关键路线节点、核应急任务的线路类型。
21、优选的,核应急任务区域是指某边界内部的空间,执行核应急任务的关键路线节点是指核应急机器人执行任务需要经过的位置,核应急任务的线路类型包括单程线路、往返线路、环形线路。
22、一种核应急机器人的自主路径规划方法,采用上述核应急机器人的自主路径规划系统,包括以下步骤:
23、步骤1)所述slam系统实时构建环境地图并定位核应急机器人位置发送到所述融合建图系统和所述导航系统,所述辐射感知系统采集环境中的辐射数据并发送给所述融合建图系统;
24、步骤2)所述融合建图系统结合环境地图并分析辐射数据,将辐射数据标注在环境地图上,以建立包含有辐射数据的辐射地图发送给所述核应急任务规划系统;
25、步骤3)所述融合建图系统更新完善辐射地图;
26、步骤4)所述通信控制系统发送控制指令到所述核应急任务规划系统,所述核应急任务规划系统该控制指令确定核应急机器人的作业区域、路径节点和线路类型发送给所述导航系统;
27、步骤5)所述导航系统根据所述核应急任务规划系统发送的根据核应急机器人的作业区域、路径节点和线路类型确定核应急机器人的导航路线,以引导核应急机器人安全移动。
28、与现有技术相比,本发明通过采集环境中的辐射数据,并将采集的辐射数据和环境地图进行融合建立出包含有辐射数据的辐射地图,使得核应急机器人在执行控制指令时,辐射地图可以为核应急机器人执行控制指令的作业区域、路径节点和线路类型提供依据,从而使得核应急机器人不需要依赖操作员的经验核水平,能够自主感知辐射环境、智能识别核应急任务的作业区域和关键节点,并能够根据任务自主规划路径。
技术特征:1.一种核应急机器人的自主路径规划方法,其特征在于,包括以下步骤:
2.一种核应急机器人的自主路径规划系统,用于实现如权利要求1所述的核应急机器人的自主路径规划方法,包括slam系统、导航系统和通信控制系统,其特征在于,还包括辐射感知系统、融合建图系统和核应急任务规划系统;
3.根据权利要求2所述的核应急机器人的自主路径规划系统,其特征在于,所述辐射感知系统包括辐射传感器,所述辐射传感器包括伽马探测器、粒子计数器、伽马相机。
4.根据权利要求2所述的核应急机器人的自主路径规划系统,其特征在于,所述融合建图系统建立的辐射地图上的辐射数据包括辐射强度的空间分布、辐射物理场、放射源、放射性元素类型、沾染放射性物质的物体、放射性物质的散布区域。
5.根据权利要求2所述的核应急机器人的自主路径规划系统,其特征在于,所述融合建图系统采用深度神经网络算法模型、机器学习方法或脉冲神经网络算法模型建立辐射地图。
6.根据权利要求2所述的核应急机器人的自主路径规划系统,其特征在于,所述通信控制系统发送的控制指令包括汇报核应急信息、自主辐射监测、自主核污染区域探索、自主放射源搜寻。
7.根据权利要求2所述的核应急机器人的自主路径规划系统,其特征在于,所述核应急任务规划系统确定的核应急任务信息包括核应急任务区域、执行核应急任务的关键路线节点、核应急任务的线路类型。
8.根据权利要求7所述的核应急机器人的自主路径规划系统,其特征在于,核应急任务区域是指某边界内部的空间,执行核应急任务的关键路线节点是指核应急机器人执行任务需要经过的位置,核应急任务的线路类型包括单程线路、往返线路、环形线路。
9.一种核应急机器人的自主路径规划方法,其特征在于,采用如权利要求2所述的核应急机器人的自主路径规划系统,包括以下步骤:
技术总结本发明公开了一种核应急机器人的自主路径规划方法及系统,该方法包括以下步骤:采集环境中的辐射数据;分析标注辐射信息;更新完善辐射地图;确定作业区域、路径节点和线路类型;确定核应急机器人的运动路径。本发明通过采集环境中的辐射数据,并将采集的辐射数据和环境地图进行融合建立出包含有辐射数据的辐射地图,使得核应急机器人在执行控制指令时,辐射地图可以为核应急机器人执行控制指令的作业区域、路径节点和线路类型提供依据,从而使得核应急机器人不需要依赖操作员的经验和水平,能够自主感知辐射环境、智能识别核应急任务的作业区域和关键节点,并能够根据任务自主规划路径。技术研发人员:吴会寅,李贺红,史元清,汤勇强,陈中,蒲雪萍,杨林,杨晨受保护的技术使用者:重庆建安仪器有限责任公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198193.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。