一种多无人艇布放回收装置、布放回收方法及系统
- 国知局
- 2024-08-01 07:11:49
本发明涉及海上船体吊机设备,特别是一种多无人艇布放回收装置、布放回收方法及系统。
背景技术:
1、随着现代科学技术的发展,无人平台技术受到了广泛的重视和深入的研究。其中,由于无人艇具有体积小、机动性好和作业隐蔽等优点,其在海洋勘探和勘测上的应用日益频繁。但是,对于无人艇等重物在海上进行布放回收的过程中存在诸多问题。例如:
2、1、在进行多台无人艇的布放和回收的过程中,人工操控吊机反复吊放工作,不仅操作过程繁琐,而且消耗了大量的时间成本,大大降低了无人艇的工作效率;
3、2、在回收无人艇的过程中,在风浪和暗涌的作用下母船和无人艇都会出现晃动,这不仅增加了人工操作的难度,而且无人艇极易与母船侧边产生碰撞导致无人艇受损。
4、因此,迫切需要一种可以实现多无人艇自动布放回收的装置,以节省人工操作和准备时间成本,同时保证无人艇布放回收的安全可靠性。
技术实现思路
1、本发明的目的在于为海上无人艇的布放回收过程提供一种多无人艇的布放回收装置,以减少多台无人艇布放回收的时间,提高无人艇的工作效率,以及保证无人艇布放回收的安全性。
2、为达到上述目的,
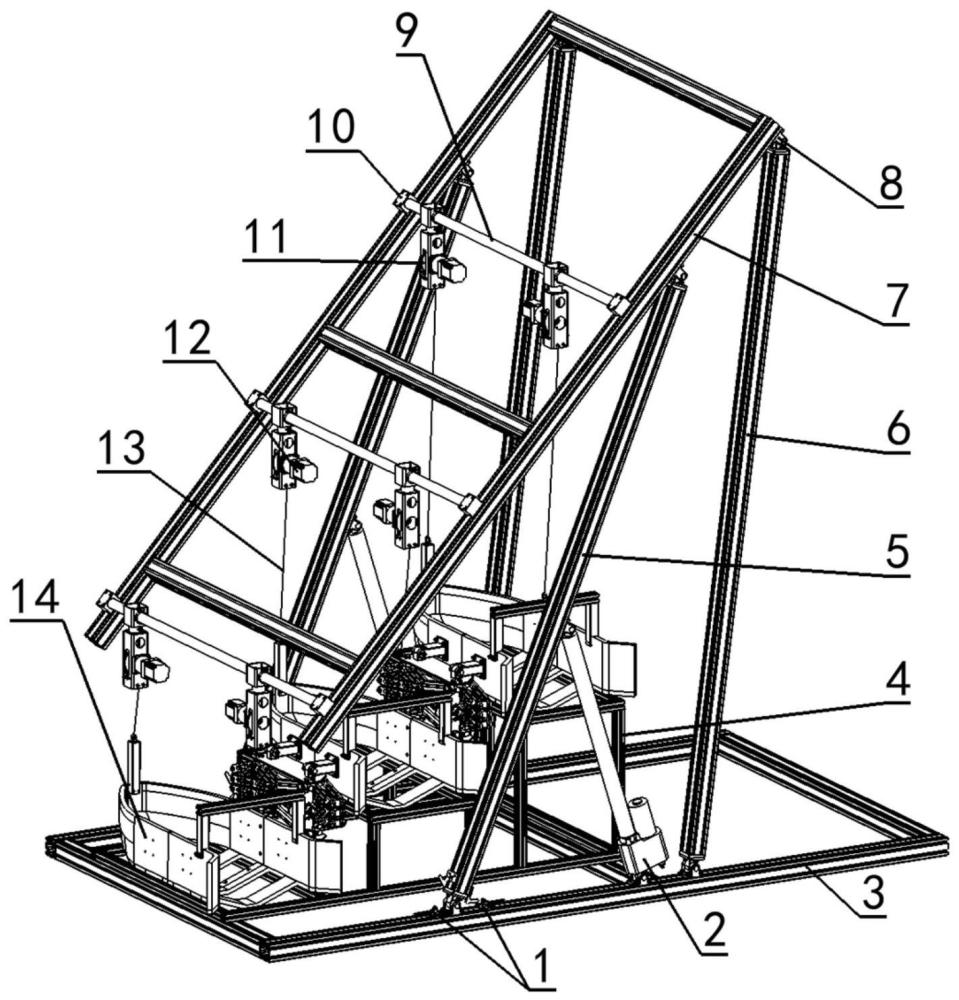
3、一方面,本发明提供了一种多无人艇布放回收装置,包括吊臂机构、吊放机构、姿态调整机构;所述吊臂机构包括方形的底架,所述底架的两个长边上均铰接有前摇臂和后摇臂,所述底架上的两个长边上分别铰接有第一电动推杆,第一电动推杆位于前摇臂和后摇臂之间;所述前摇臂的上端和后摇臂的上端铰接有同一个方形的吊臂架,所述前摇臂下端的前后两侧分别设有光电限位开关,用于定位前摇臂向前或向后的摆动角度;所述吊臂架的短边与所述底架的短边平行,所述吊臂架上固定连接有多个与其短边平行的吊管,每个所述吊管上设有两个吊放机构,两个所述吊放机构上悬吊有一个浮动托架,所述浮动托架用于承载无人艇,每两个相邻的浮动托架之间设有姿态调整机构,姿态调整机构用于调整两个浮动托架的间距和角度;所述姿态调整机构包括两组对称设置的剪刀式伸缩机构,其中一个剪刀式伸缩机构的首尾两端分别铰接有第二电动推杆,所述第二电动推杆的伸缩端铰接在另一个剪刀式伸缩机构的外侧的铰接轴处,两个第二电动推杆共同控制两组剪刀式伸缩机构的伸缩,两个所述剪刀式伸缩机构上设有使其联动的平行杆,组合成为一对双层剪刀机构,所述双层剪刀机构的两端分别铰接有移动平台,两个移动平台分别铰接在对应的两个浮动托架上。
4、在一些实施例中,所述吊放机构包括壳体,所述壳体内部设有绕线转盘,所述绕线转盘上卷绕有缆索,所述壳体上设有步进电机,步进电机与绕线转盘传动连接,所述步进电机与绕线转盘之间传动连接有行星减速器,
5、在一些实施例中,所述吊放机构上端设有吊块,所述吊块与壳体之间通过压力传感器21连接,所述吊块上开设有通孔,所述吊块经通孔套设在吊管上,所述吊管上固定连接有多个喉箍,用于限制吊块与吊管的相对位移。
6、在一些实施例中,所述壳体内部设有位于绕线转盘下方的滚筒,所述滚筒的数量为四个,每两个并排设置的滚筒为一组,两组滚筒垂直设置,所述缆索依次穿过两组滚筒之间。
7、在一些实施例中,所述底架上固定连接支撑架,所述支撑架上端为阶梯状。
8、另一方面,本发明公开了一种多无人艇布放、回收方法;
9、包括多无人艇布放方法,缆索收卷使浮动托架升起,直至多个浮动托架均抬升至最高限位点,浮动托架与支撑架分离;第一电动推杆伸长,推动前摇臂以其底部铰接处为轴心向前摆动,后摇臂随动,吊臂架前移并展开直至架体水平;多个吊放机构同步放卷,使多个浮动托架并行同步下降直至接触水面;选择船只布放姿态,两个第二电动推杆配合动作,调整浮动托架的位置和角度;船只驶离浮动托架;
10、多无人艇回收方法:船只驶入浮动托架;姿态调整机构的两个第二电动推杆均收缩至预设值,两组剪刀式伸缩机构收缩至极限位置,使多个浮动托架平行;多个吊放机构同步收卷,使多个浮动托架升至最高限位点;第一电动推杆收缩,前摇臂向后摆动至预设角度;缆索放卷,使多个浮动托架依次下落到支撑架上。
11、本发明与已有的公知技术相比,具有如下显著效果:
12、1.单次作业可完成三艘无人艇的布放回收,提升无人艇执行任务的效能与意义。
13、2.通用性好,可对多个型号母船安装。
14、3.通过姿态调整机构可以对浮动托架的位置和角度进行调整,结合波浪补偿算法,动态调整浮动托架位置和角度,以适应复杂海况,提升无人艇回收的成功率和稳定性,本发明结合波浪补偿算法后,还可避免无人艇与母船产生碰撞和损伤。
15、4.姿态调整机构可使浮动托架组合实现六种主要收放姿态的变换,减小多无人艇收放时母船与浮动托架间的相互干扰影响,有效促进多艘无人艇的顺利回收。
技术特征:1.一种多无人艇布放回收装置,其特征在于,包括吊臂机构、吊放机构、姿态调整机构;
2.根据权利要求1所述的一种多无人艇布放回收装置,其特征在于:所述吊放机构包括壳体,所述壳体内部设有绕线转盘,所述绕线转盘上卷绕有缆索,所述壳体上设有步进电机,步进电机与绕线转盘传动连接,所述步进电机与绕线转盘之间传动连接有行星减速器。
3.根据权利要求2所述的一种多无人艇布放回收装置,其特征在于:所述吊放机构上端设有吊块,所述吊块与壳体之间通过压力传感器21连接;
4.根据权利要求3所述的一种多无人艇布放回收装置,其特征在于:所述壳体内部设有位于绕线转盘下方的滚筒,所述滚筒的数量为四个,每两个并排设置的滚筒为一组,两组滚筒垂直设置,所述缆索依次穿过两组滚筒之间。
5.根据权利要求1所述的一种多无人艇布放回收装置,其特征在于:所述底架上固定连接支撑架,所述支撑架上端为阶梯状。
6.一种多无人艇布放方法,应用于权利要求1-5中任意一项所述的多无人艇布放回收装置,其特征在于,包括以下步骤:
7.一种多无人艇回收方法,应用于权利要求1-5中任意一项所述的多无人艇布放回收装置,其特征在于,包括以下步骤:
8.一种多无人艇回收系统,用于执行权要求6或7中所述的方法,其特征在于,包括吊臂控制系统,用于接收主动开关信号、光电限位开关反馈的停止信号,控制两个第一电动推杆同步伸长和缩回;
技术总结本发明提出了一种多无人艇布放回收装置,包括吊臂机构、吊放机构、姿态调整机构、浮动托架和支撑架。吊臂机构采用双摇杆机构,通过吊臂体两侧的电动推杆同时驱动,使得装置具备缩回折叠和平行展开两种功能。可以根据工作需要进行形态转换,分别实现对无人艇的静态放置和执行任务前后的布放回收操作。吊放机构由绕绳机构和步进电机组成,从而实现对无人艇的起吊和下放功能。姿态调整机构由一对双层剪刀机构和电推杆组成,可实现浮动托架在水面上的姿态控制。本发明专利设计的多无人艇布放回收装置可以实现多无人艇的自主布放回收,避免了人工对多台无人艇收放的繁琐操作,提高了无人艇的工作效率。技术研发人员:杨毅,王海涛,李光,田亚平,邵文韫,杨扬,钟宋义,张泉,彭艳,罗均受保护的技术使用者:上海大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/226512.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表