DoS攻击下具有切换拓扑的多无人机事件触发编队控制方法
- 国知局
- 2024-08-01 00:16:31
本发明涉及无人机控制,具体涉及dos攻击下具有切换拓扑的多无人机事件触发编队控制方法。
背景技术:
1、多无人机系统的编队控制由于其在军事和民用领域的潜力引起了多方的关注。时变编队是编队控制中一种灵活高效的编队控制方法,其能够适应环境和任务需求不断变化自身编队。有向通信是一种单向通信方式,通过有向通信能够让无人机间实现单方向的信息传递,降低通讯损耗。同时,障碍物、通信干扰等因素会导致无人机之间的通信损失,给通信网络带来额外的挑战。为此,无人机间的通信网络拓扑常常采用切换拓扑,通过切换拓扑,改变单一的通讯网络结构,大大提高无人机通讯的稳定性和可靠性。
2、通信网络是多无人机系统编队控制的基础,因此需要预防通信网络整体受到攻击的情况。本发明主要研究网络攻击中的dos攻击,这种攻击通过恶意占用通信网络资源,引起网络拥堵,导致系统内的正常数据信息传输受阻,进而造成通信的瘫痪。同时频繁的无人机间通信既需要无人机快速测量自身信息,又需要向外多次传输。针对此资源浪费的情况,发明人提出了事件触发机制,可以在确保相对性能的同时减少的系统通信消耗。
技术实现思路
1、为此,本发明提供dos攻击下具有切换拓扑的多无人机事件触发编队控制方法,相比传统事件触发机制采用更加高效的积分事件触发机制,进一步降低通信消耗,提高系统效率。
2、为了实现上述目的,本发明提供如下技术方案:dos攻击下具有切换拓扑的多无人机事件触发编队控制方法,该控制方法包括:
3、建立具有切换拓扑的领导者-跟随者系统模型;
4、根据领导者-跟随者系统模型联合设计积分事件触发条件和事件触发控制器;
5、建立dos攻击模型,等效dos攻击时间;并根据事件触发控制器建立dos攻击下系统模型和无dos攻击下系统模型;以及
6、根据dos攻击下系统模型和无dos攻击下系统模型设计切换拓扑在dos攻击下的约束条件以及控制器增益。
7、优选的,建立具有切换拓扑的领导者-跟随者系统模型包括以下步骤:
8、首先引入图论,利用切换拓扑图来表示无人机群内的信息交互,一个拓扑图代表一种无人机通信网络拓扑;
9、确定潜在的拓扑结构的数量和结构;令表示切换信号,潜在的拓扑图个数为,其中表示所有可能拓扑图的个数;假设存在一个无限的时间区间序列,,该序列无重叠且均匀有界,其中表示第个切换瞬间;通信拓扑图在时间区间序列内是不变的;同时,所考虑的切换信号满足平均驻留时间条件;
10、用表示在切换信号下多无人机系统的有向拓扑图;
11、定义邻接矩阵为,对于,,其中表示从无人机到无人机之间存在信息交互;
12、令为的入度矩阵,表示的拉普拉斯矩阵;领导者和追随者之间的相互作用用来描述,定义;
13、为了保证来自领导无人机的信息能够成功地传递给跟随无人机,假设所有跟随无人机至少有一条与领导无人机相连的通信路径;
14、跟随无人机的动力学描述为:
15、;
16、领导无人机的动力学描述为:
17、;
18、其中,、,分别表示跟随无人机的位置和速度;、,均是已知的系统系数;是系统系数矩阵;表示控制输入;、,分别表示领导无人机的位置和速度;
19、定义,,以上方程式简化为:
20、跟随无人机:;
21、领导无人机:;
22、其中,,,,t代表矩阵的转置。
23、根据领导者-跟随者系统模型联合设计积分事件触发条件和事件触发控制器具体包括以下步骤:
24、用编队向量来代表每架跟随无人机需要实现的队形,对于任何已知的有界状态,无人机满足:
25、;
26、则多无人机系统被认为达到理想的编队效果;因此将跟踪误差定义为:
27、;
28、以上多无人机系统可转化为:
29、;
30、其中,,,为维的单位矩阵,代表跟踪误差,代表跟踪误差的导数;
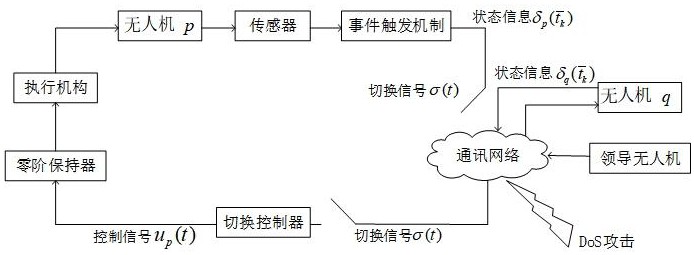
31、在切换信号下,具有事件触发机制的控制器为:
32、,;
33、;
34、;
35、其中,表示第个事件触发时刻,代表第个事件触发时刻;跟随无人机的状态信息只有在触发时刻时才会传递给邻居无人机;邻居无人机代表与该跟随无人机具有直接通信连接的其他跟随无人机;为已知常数矩阵;
36、下一个触发时刻描述为:
37、;
38、其中为信号符号,表示系统受到dos攻击,否则;是一个正常数,受系统所需性能的限制;
39、积分事件触发函数为:
40、;
41、其中,表示触发差值,为需要设计的触发权值矩阵,为常数。
42、从控制器的结构看出,包含了无人机通过通信网络获得的状态信息,而仅依赖于其自身的编队信息;这意味着在dos攻击期间,由于网络通信中断,将失效,而不受影响并保持其性能。
43、建立dos攻击模型,等效dos攻击时间;并根据事件触发控制器建立dos攻击下系统模型和无dos攻击下系统模型包括以下步骤:
44、从dos的能量和持续性考虑,假设存在标量和,使得在内dos的总攻击次数满足:
45、;
46、设dos每次攻击的起始时刻为,且;定义dos攻击的第次攻击时刻和休眠时刻为:
47、;
48、;
49、其中为第次dos攻击的持续时间;
50、假设存在标量和,使dos总持续时间在内满足:
51、;
52、理想的dos攻击是在dos攻击消失后,系统能够立即传输信息,然而这是不现实的;通过控制器和事件触发机制的设计,得出即使dos攻击结束,仍然存在一个不大于的时间间隔,在此期间系统无法传输信息,其效果与dos攻击相似;因此为了简化分析过程,将等效dos的攻击时间;
53、当dos攻击处于两次事件触发间隔内时,对应的等效dos攻击持续时间等于原dos攻击持续时间;当dos攻击的持续时间内包含多次事件触发间隔时,等效dos攻击的持续时间小于;当两次dos攻击和之间没有事件触发时,等效dos攻击持续时间小于;
54、基于以上概述,得出等效dos攻击的总持续时间受以下不等式限制:
55、;
56、dos攻击的休眠总持续时间为:
57、;
58、对于dos攻击时的系统为:
59、;
60、对于dos休眠时的系统为:
61、;
62、其中,。
63、根据dos攻击下系统模型和无dos攻击下系统模型设计切换拓扑在dos攻击下的约束条件以及控制器增益包括以下步骤:
64、对于当前拓扑图,,其拉普拉斯矩阵,通过以下不等式获得一辅助矩阵:
65、;
66、要求辅助矩阵,并且常数;
67、选取多李雅普诺夫函数:
68、;
69、其中,为第个子系统的李雅普诺夫矩阵;
70、为确保误差系统半全局一致最终有界,误差系统满足如下不等式,其中,;
71、;
72、待设计的控制器增益,李雅普诺夫矩阵以及事件触发矩阵需满足如下线性矩阵不等式;
73、其中,控制器增益参数,前一个拓扑的李雅普诺夫矩阵,事件触发参数,表示在受到dos攻击时刻李雅普诺夫函数的增长系数,表示在dos攻击休眠时李雅普诺夫函数的增长系数,表示从dos攻击休眠阶段进入dos攻击阶段李雅普诺夫函数的增长系数,表示从dos攻击阶段进入dos攻击休眠阶段李雅普诺夫函数的增长系数,表示在切换时刻多李雅普诺夫函数的增长系数,与为dos攻击休眠阶段和dos攻击阶段的不同参数矩阵;
74、;
75、;
76、;
77、;
78、;
79、;
80、其中控制器增益;
81、当切换信号满足:
82、;
83、误差系统是半全局一致最终有界的,通过求解上述线性矩阵不等式,得到李雅普诺夫矩阵,事件触发矩阵,计算解得控制器增益矩阵。
84、本发明还公开了dos攻击下具有切换拓扑的多无人机事件触发编队控制系统,包括计算机可读存储介质和处理器;计算机可读存储介质用于存储可执行指令;处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行上述的控制方法。
85、该控制系统由1架领导无人机和架跟随无人机组成,所有跟随无人机都在自己预先设定的时变编队中跟踪领导无人机。
86、本发明与现有技术相比,其显著效果如下:
87、1、本发明研究了dos攻击下具有切换拓扑的多无人机系统的时变编队控制问题。设计了时变编队控制协议,实现了dos攻击下的预设队形跟踪。
88、2、本发明为了提高通信网络的可靠性和灵活性,在控制协议中引入了切换拓扑,并推导了切换拓扑在dos攻击下的约束条件。引入了改进的积分事件触发机制,进一步减少了通信资源的占用。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200387.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表