一种基于自适应角速率解算的船舶航向控制方法与流程
- 国知局
- 2024-08-01 00:16:30
本发明涉及非电变量的控制,尤其涉及一种基于自适应角速率解算的船舶航向控制方法。
背景技术:
1、当前,船舶操纵自动控制系统中主要采用比例-积分-微分(pid)调节器作为航向自动控制策略,因此,航向速率的信号品质是影响航向自动控制品质关键因素之一。
2、在经典调节理论中,基于测量的航向信号,采取经典差分的方式得到航向速率信号,也是控制领域常用的处理方法之一。当差分时间为时,输出的微分信号中将会包含倍的噪声信号,从而越小,噪声放大越严重,有时完全可以淹没真实的微分信号,这就是经典差分微分器对噪声的严重放大效应。由于噪声通常比控制信号变化更迅速,因此信号的微分总是减小了信噪比,正是因为经典微分器的噪声放大固有缺陷,严重影响船舶航向pid控制器的控制品质,进而就会增加操舵频次,加速机械磨损,增加船舱噪音。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于自适应角速率解算的船舶航向控制方法,通过对自适应角速率进行解算得到平滑的角速率信号,采用解算出的自适应角速率计算指令舵角后对船舶进行航向控制,有利于减少操舵频次,减小机械磨损,降低船舱噪音。
2、本发明是通过以下技术方案予以实现:
3、一种基于自适应角速率解算的船舶航向控制方法,其包括如下步骤:
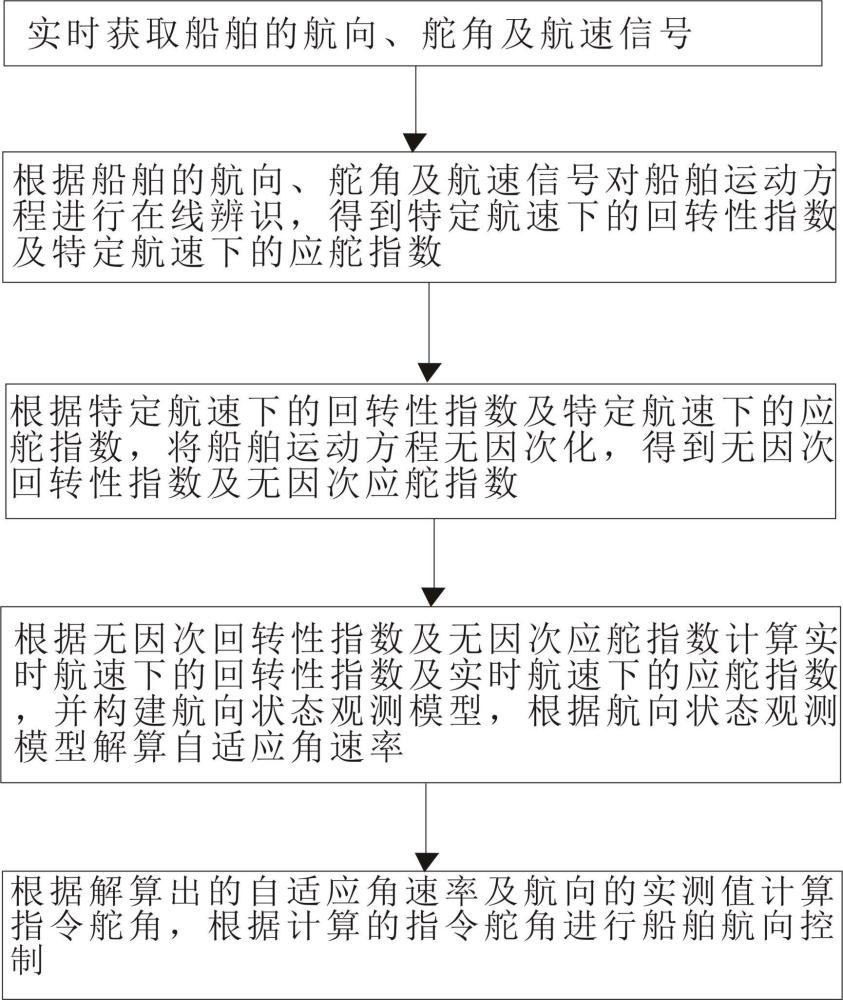
4、s1:实时获取船舶的航向、舵角及航速信号;
5、s2:根据船舶的航向、舵角及航速信号对船舶运动方程进行在线辨识,得到特定航速下的回转性指数及特定航速下的应舵指数;
6、s3:根据特定航速下的回转性指数及特定航速下的应舵指数,将船舶运动方程无因次化,得到无因次回转性指数及无因次应舵指数;
7、s4:根据无因次回转性指数及无因次应舵指数计算实时航速下的回转性指数及实时航速下的应舵指数,并构建航向状态观测模型,根据航向状态观测模型解算自适应角速率;
8、s5:根据解算出的自适应角速率及航向测量值计算指令舵角,根据计算的指令舵角进行船舶航向控制。
9、进一步,步骤s2中船舶运动方程为式(1):
10、(1);
11、其中:表示特定航速下的回转性指数,表示特定航速下的应舵指数,表示航向测量值的一阶微分,表示航向测量值的二阶微分,表示舵角测量值。
12、进一步,步骤s2中采用如下方法获取特定航速下回转性指数及特定航速下的应舵指数:
13、s21:将船舶运动方程转换成船舶航向运动差分方程为式(2):
14、(2);
15、其中:表示航向的第次测量值,表示航向的第次测量值,表示航向的第次测量值,表示舵角的第次测量值,表示舵角的第次测量值,表示航向的第次测量值系数,表示航向的第次测量值系数,表示舵角的第次测量值系数,表示舵角的第次测量值系数;
16、s22:根据船舶航向运动差分方程采用最小二乘法结合式(3)、式(4)得到参数、、、;
17、(3);
18、(4);
19、其中:表示差分方程系数矩阵,表示增益矩阵,表示测量输入矩阵,表示的转置矩阵,表示航向的第次测量值,表示协方差矩阵;
20、s23:将参数、、、代入到式(5)中计算特定航速下的回转性指数及特定航速下的应舵指数:
21、(5);
22、其中:表示采样时间,表示自然常数。
23、进一步,步骤s3中根据式(6)得到的无因次参数以及的无因次参数:
24、(6);
25、其中:表示进行参数辨识时船舶的航速,表示船舶长度。
26、进一步,步骤s4中根据式(7)计算实时航速下的回转性指数和实时航速下的应舵指数:
27、(7);
28、其中:表示船舶的实时航速。
29、进一步,步骤s4中构建的航向状态观测模型为式(8):
30、(8);
31、其中:表示航向微分估计值,表示航向二阶微分估计值,表示航向估计值,表示自适应角速率,表示步长,表示航向角加速度计算增益系数,表示航向角速率计算增益系数,表示时间。
32、进一步,步骤s5中根据式(9)计算指令舵角:
33、(9);
34、其中:表示指令舵角,表示指令航向,表示比例系数,表示微分系数,表示积分系数。
35、发明的有益效果:
36、本发明提供的一种基于自适应角速率解算的船舶航向控制方法,通过对船舶运动方程在线辨识,无需采用水池实验或复杂的z型操舵实验获得船舶模型参数;通过船舶运动方程无因次化,只利用一个航速的转向数据,就可得到全部航速下船舶的运动模型参数;构建航向状态观测模型进行解算得到平滑的角速率信号,采用解算出的自适应角速率再计算指令舵角对船舶航向进行控制,有利于减少操舵频次,减小机械磨损,降低船舱噪音。
技术特征:1.一种基于自适应角速率解算的船舶航向控制方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s2中船舶运动方程为式(1):
3.根据权利要求2所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s2中采用如下方法获取特定航速下回转性指数及特定航速下的应舵指数:
4.根据权利要求3所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s3中根据式(6)得到的无因次参数以及的无因次参数:
5.根据权利要求4所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s4中根据式(7)计算实时航速下的回转性指数和实时航速下的应舵指数:
6.根据权利要求5所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s4中构建的航向状态观测模型为式(8):
7.根据权利要求6所述的一种基于自适应角速率解算的船舶航向控制方法,其特征在于:步骤s5中根据式(9)计算指令舵角:
技术总结本发明涉及非电变量的控制或调节系统技术领域,尤其涉及一种基于自适应角速率解算的船舶航向控制方法,包括如下步骤:实时获取船舶的航向、舵角及航速信号;对船舶运动方程进行在线辨识,得到特定航速下的回转性指数及特定航速下的应舵指数;将船舶运动方程无因次化,得到无因次回转性指数及无因次应舵指数;计算实时航速下的回转性指数及实时航速下的应舵指数,并构建航向状态观测模型,解算自适应角速率;计算指令舵角,根据计算的指令舵角进行船舶航向控制。本发明提供的方法有利于减少操舵频次,减小机械磨损,降低船舱噪音。技术研发人员:赵光,苏畅,沈东,廖益欣,张子昌,凌庄峰,黄宇明,张梦雯受保护的技术使用者:中国船舶集团有限公司第七〇七研究所技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表