-
参数自适应的水下航行器航向最优控制方法、系统及产品与流程
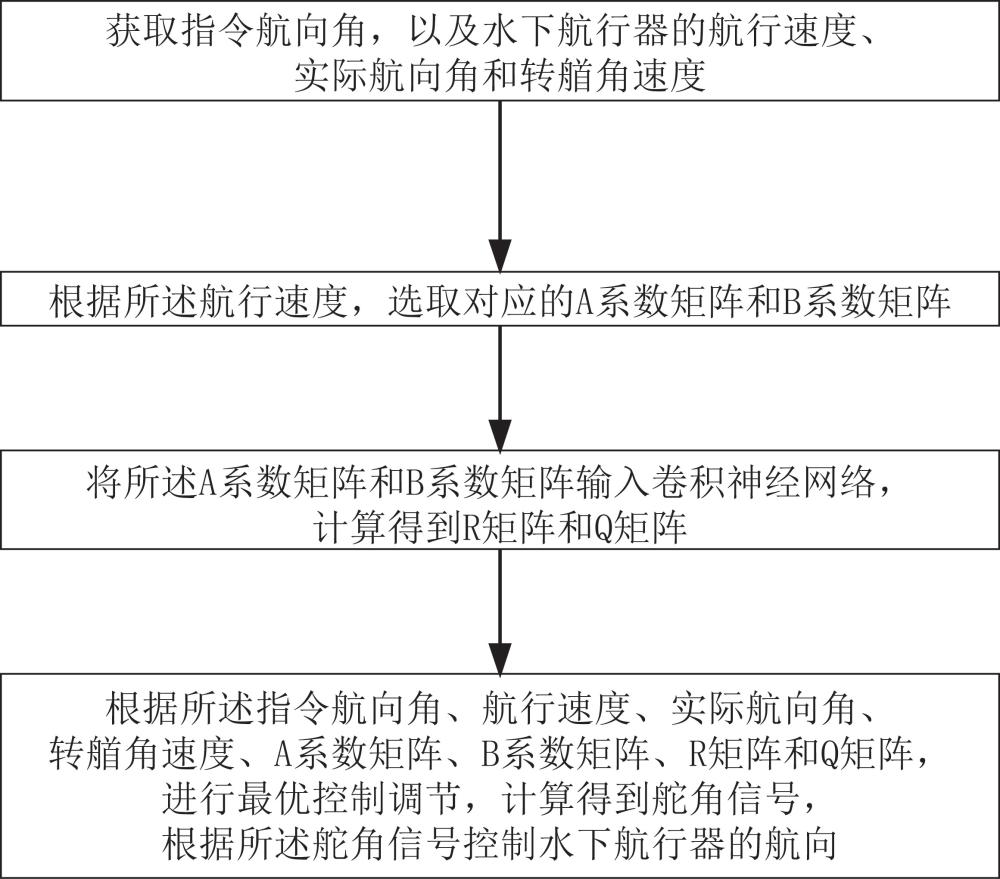
本发明涉及水下航行器运动控制,尤其涉及一种参数自适应的水下航行器航向最优控制方法、系统及产品。背景技术:1、在船舶的运动控制中,航向控制是其中非常重要的一个方面,常用的控制方法有pid控制、bang-......
-
一种航向角颠倒的修正方法、系统、车辆及存储介质与流程
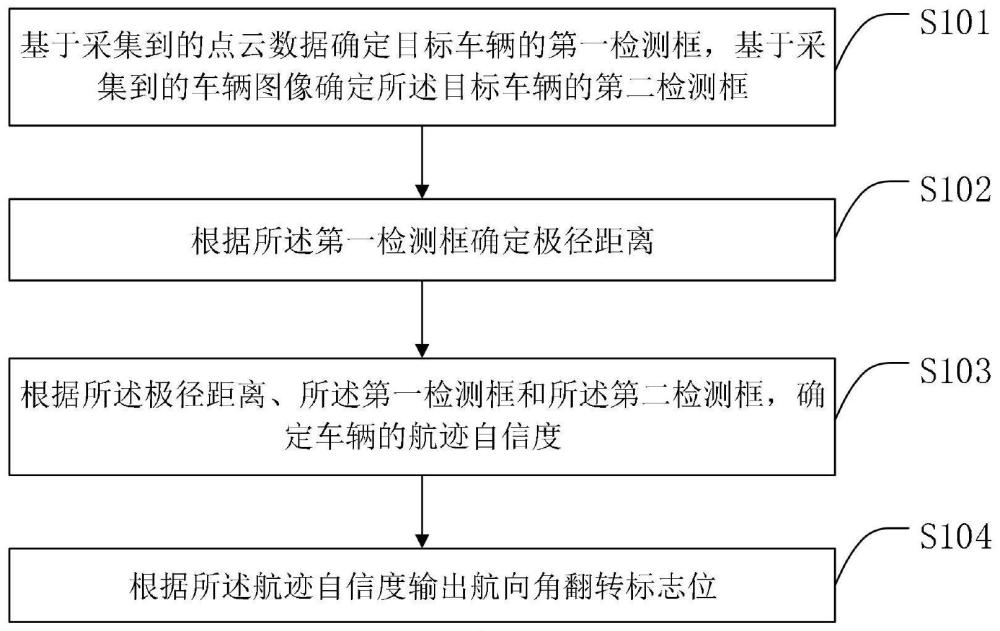
本技术涉及自动驾驶,尤其涉及一种航向角颠倒的修正方法、系统、车辆及存储介质。背景技术:1、bev4d标注(bird's eye view 4d labeling,面向鸟瞰视角的四维标注)是一种将三维物......
-
一种外接无人机航向灯线路板的制作方法
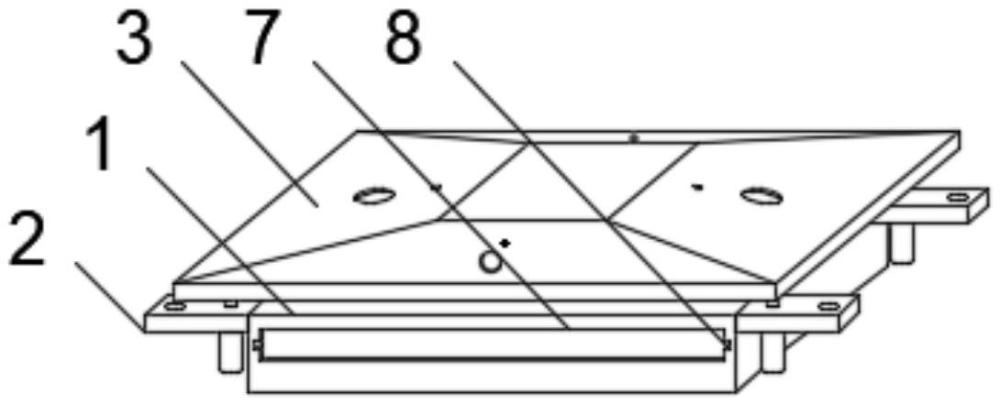
本技术涉及无人机航向灯线路板,特别涉及一种外接无人机航向灯线路板。背景技术:1、随着无人机的广泛应用,对无人机的要求也越来越高,由于环境光线较暗,无人机对于航线的判断容易产生误差,需要配备航向灯进行辅......
-
具备滚转和尾舵双模航向调节功能的水下滑翔机
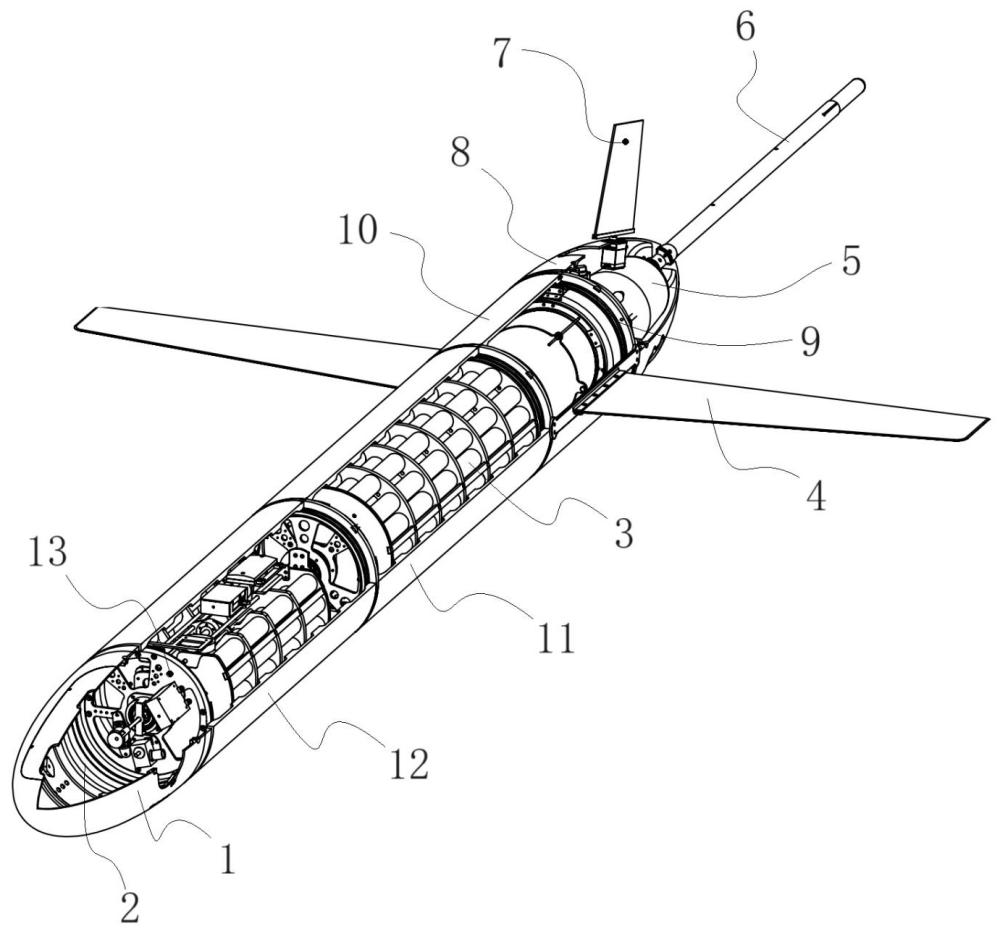
本发明属于水下滑翔机,尤其涉及一种具备滚转和尾舵双模航向调节功能的水下滑翔机。背景技术:1、水下滑翔机是一种新型移动式水下无人自主平台,大都是通过改变自身浮力完成潜-浮运动状态转换,借助姿态调节和作用......
-
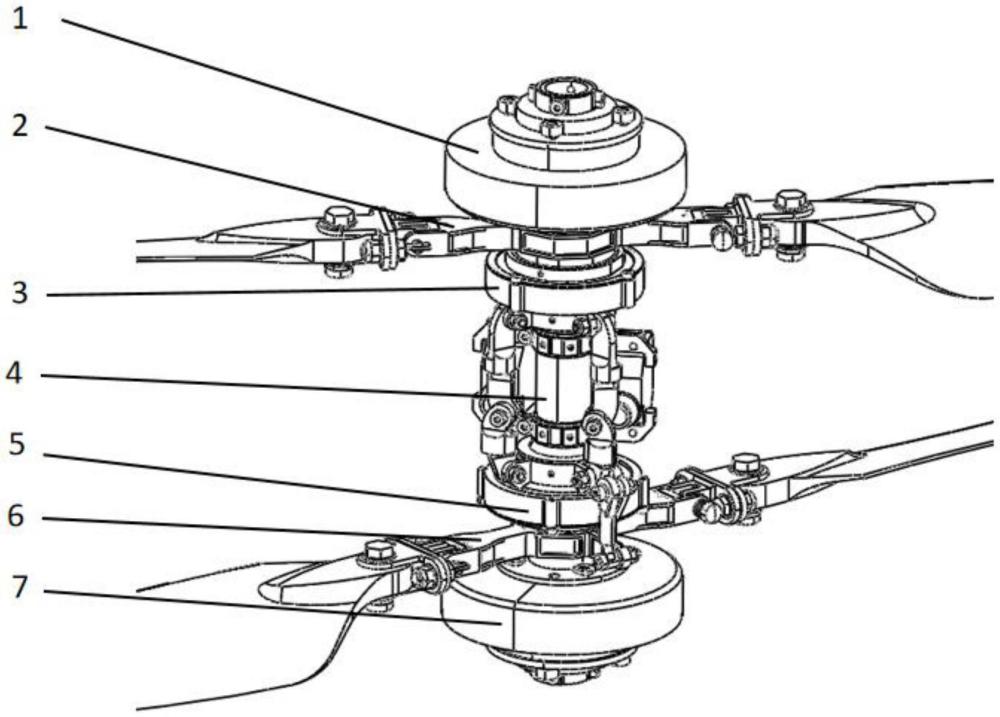
一种无人直升机的变转速航向操纵系统
本发明涉及无人机,尤其涉及一种无人直升机的变转速航向操纵系统。背景技术:1、在直升机领域,共轴双旋翼直升机拥有安装在同心轴上的上下两副旋翼,在工作的时候,这两副旋翼沿相反的方向旋转而产生的反扭矩相互抵......
-
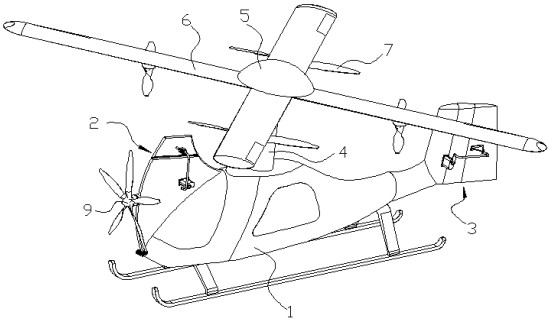
一种迫降航向控制装置的制作方法
本技术涉及航空,具体的说,尤其是一种迫降航向控制装置。背景技术:1、旋翼无人机用途广泛,如勘察、载物甚至载人等,而现有的无人机中,通常是利用四个或更多旋翼进行升降,若旋翼出现故障,容易导致无人机急速下......
-
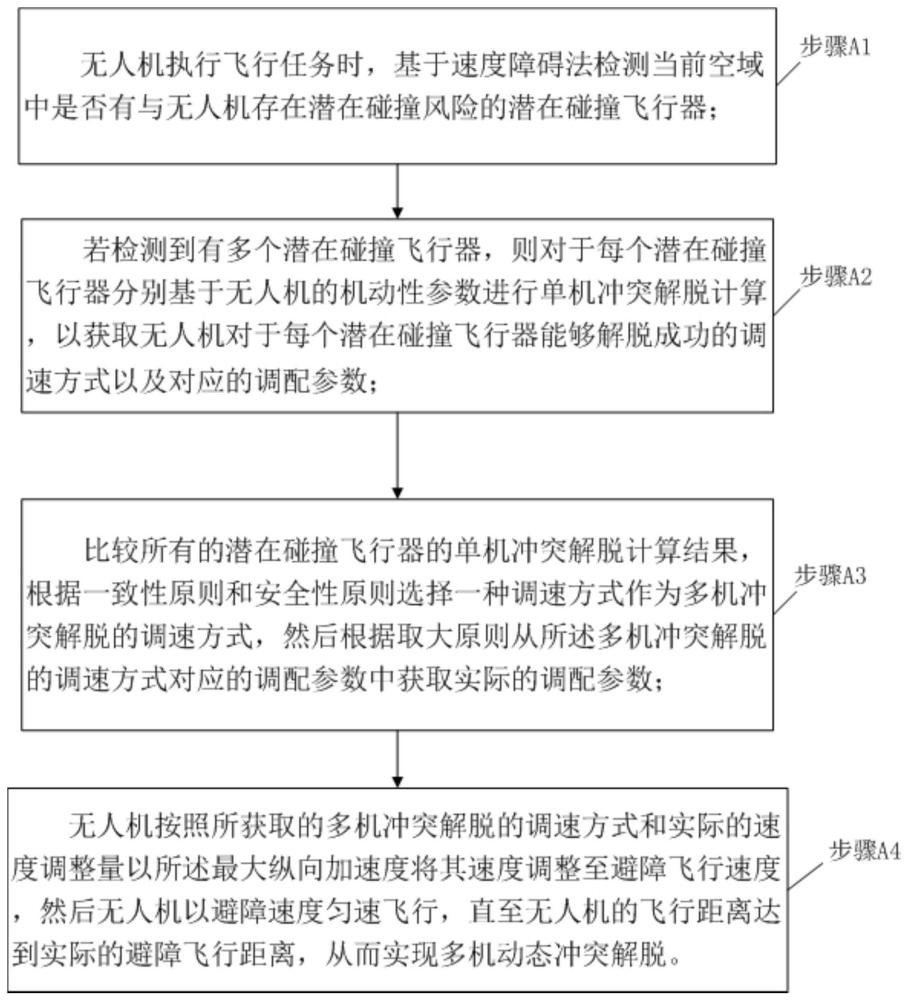
基于速度或航向调配的无人机多机动态冲突解脱方法与流程
本发明涉及无人机,尤其涉及一种基于速度或航向调配的无人机多机动态冲突解脱方法。背景技术:1、随着无人机系统在工业、农业、军事等多个领域的广泛应用,无人机飞出“隔离空域”并与有人机共享空域执行多样化任务......
-
一种基于推力控制飞行的飞行器横航向增稳控制方法与流程
本发明涉及飞行器自动控制研究领域。更具体地说,本发明涉及一种基于推力控制飞行的飞行器横航向增稳控制方法。背景技术:1、机械结构或液压系统故障,甚至外力破坏(如炸弹爆炸或导弹袭击)导致飞行器机体结构受损......
-

一种数据丢失情况下无人水面航行器的航向控制方法
本发明涉及无人水面航行器控制,尤其是指一种数据丢失情况下无人水面航行器的航向控制方法。背景技术:1、无人水面航行器(usv)是一种设计用于在水上执行任务的海上平台,近年来引起人们广泛的关注,并在海上领......
-
一种主动增稳的飞行器横航向飞控设计方法与流程
本发明涉及飞行器自动控制研究领域,更具体地说,本发明涉及一种主动增稳的飞行器横航向飞控设计方法。背景技术:1、飞行控制是飞行器维持姿态稳定,实现受控飞行的基础,对于提升飞行员操作便宜性,改善飞行器飞行......
-
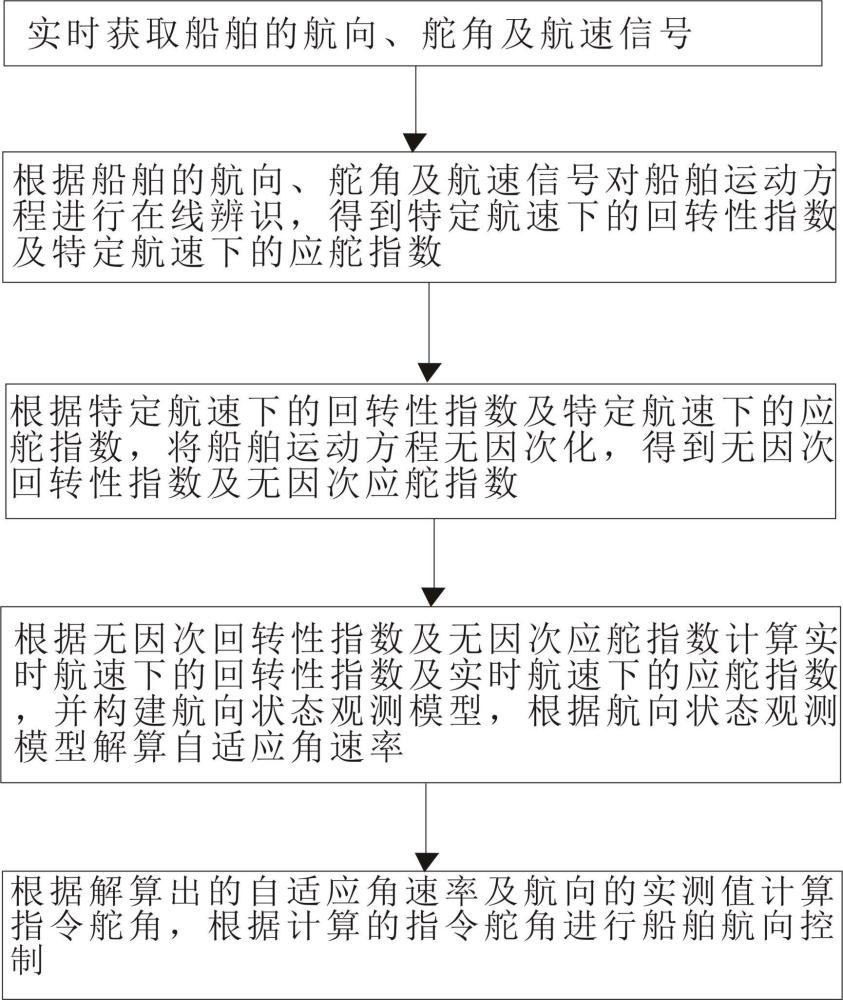
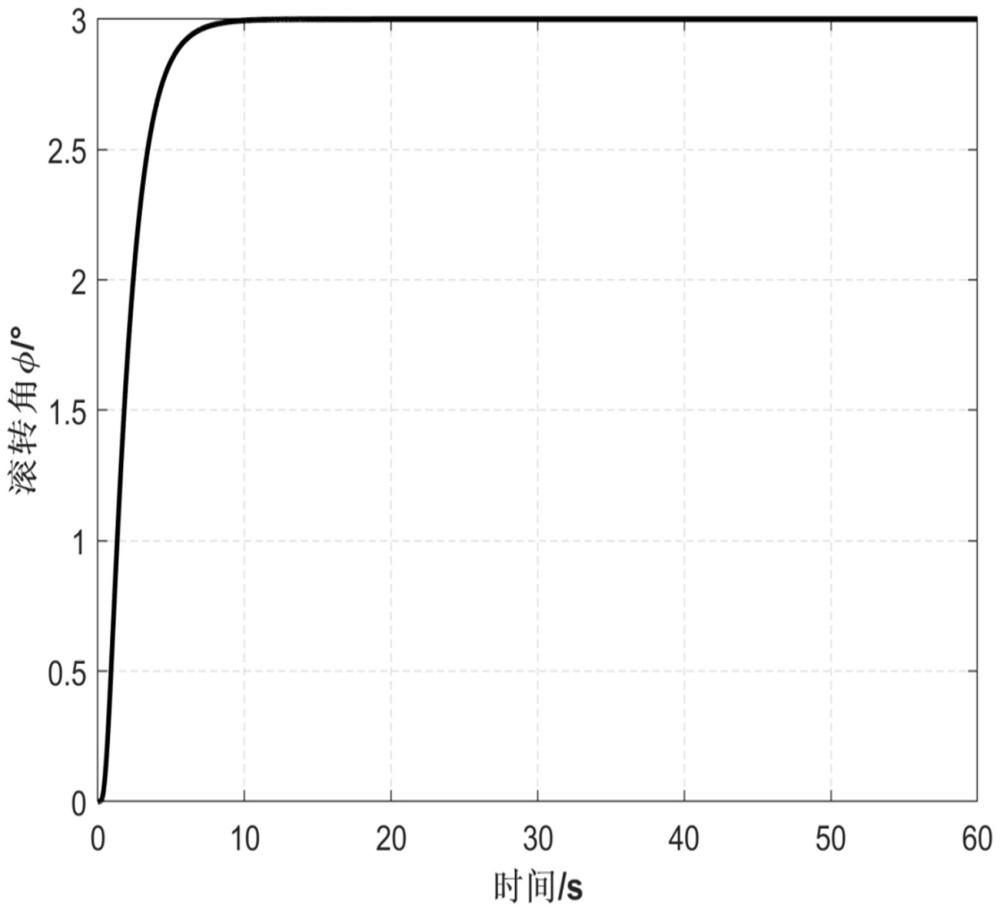
一种基于自适应角速率解算的船舶航向控制方法与流程
本发明涉及非电变量的控制,尤其涉及一种基于自适应角速率解算的船舶航向控制方法。背景技术:1、当前,船舶操纵自动控制系统中主要采用比例-积分-微分(pid)调节器作为航向自动控制策略,因此,航向速率的信......
-
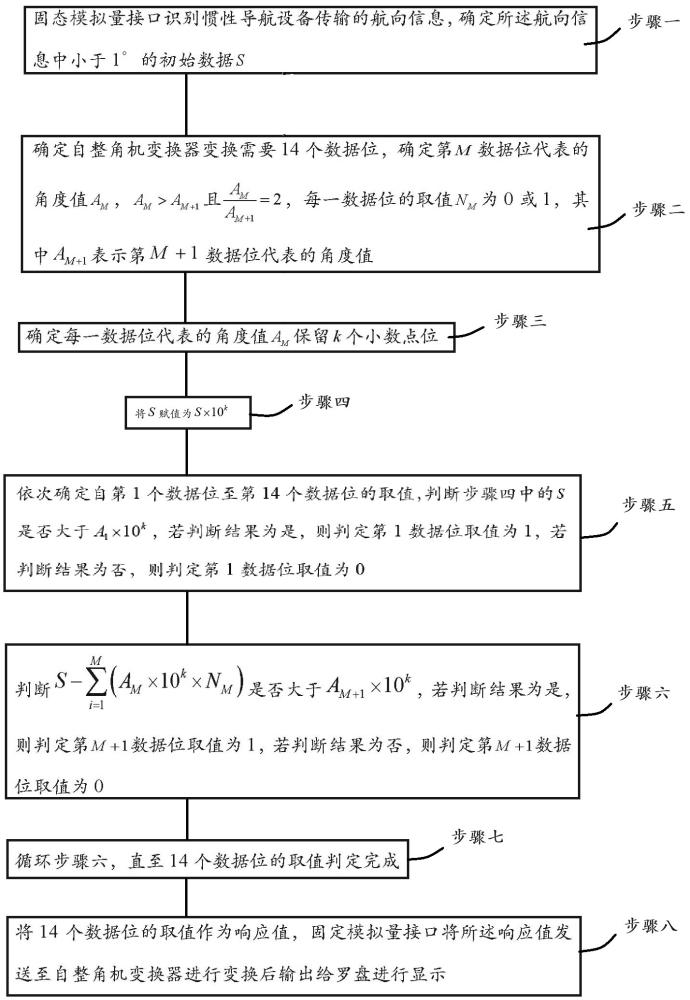
一种固态模拟量接口传输航向数据的方法与流程
本发明涉及船舶航向传输,尤其涉及一种固态模拟量接口传输航向数据的方法。背景技术:1、船舶操舵仪罗盘旋转一周代表1°,罗盘接收1°以内的自整角机类型的模拟航向信息,并由自整角机航向信息的功率驱动旋转,时......
-
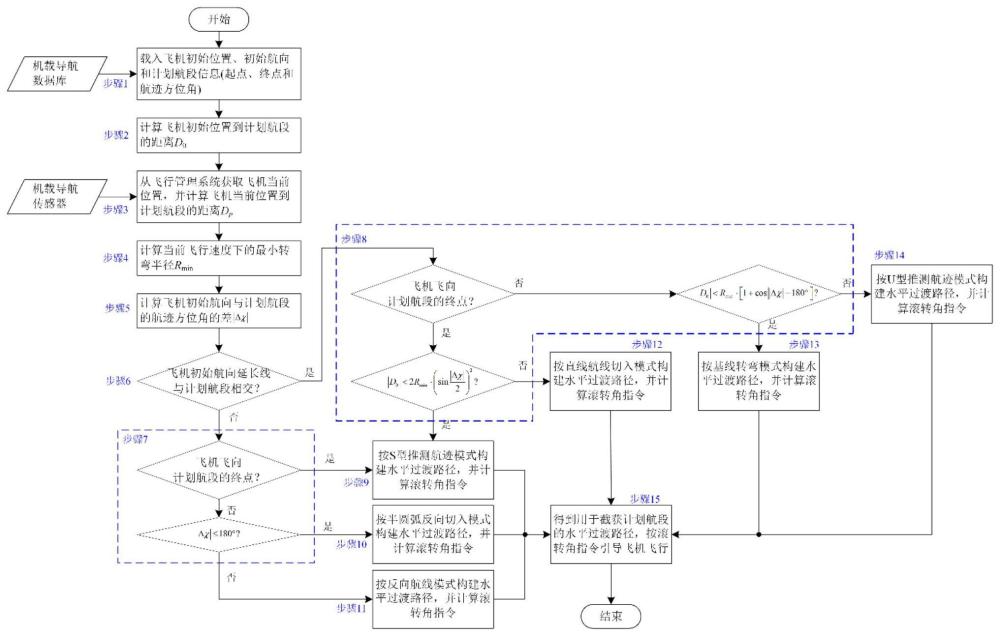
一种基于航向变化量最小策略的大型客机水平截获过渡路径构建方法
本发明属于航空,具体涉及一种基于航向变化量最小策略的大型客机水平截获过渡路径构建方法。背景技术:1、随着航空技术的进步和民航业的蓬勃发展,高密度、大流量、小间隔的航空运行现状对民用客机的飞行管理系统(......
-
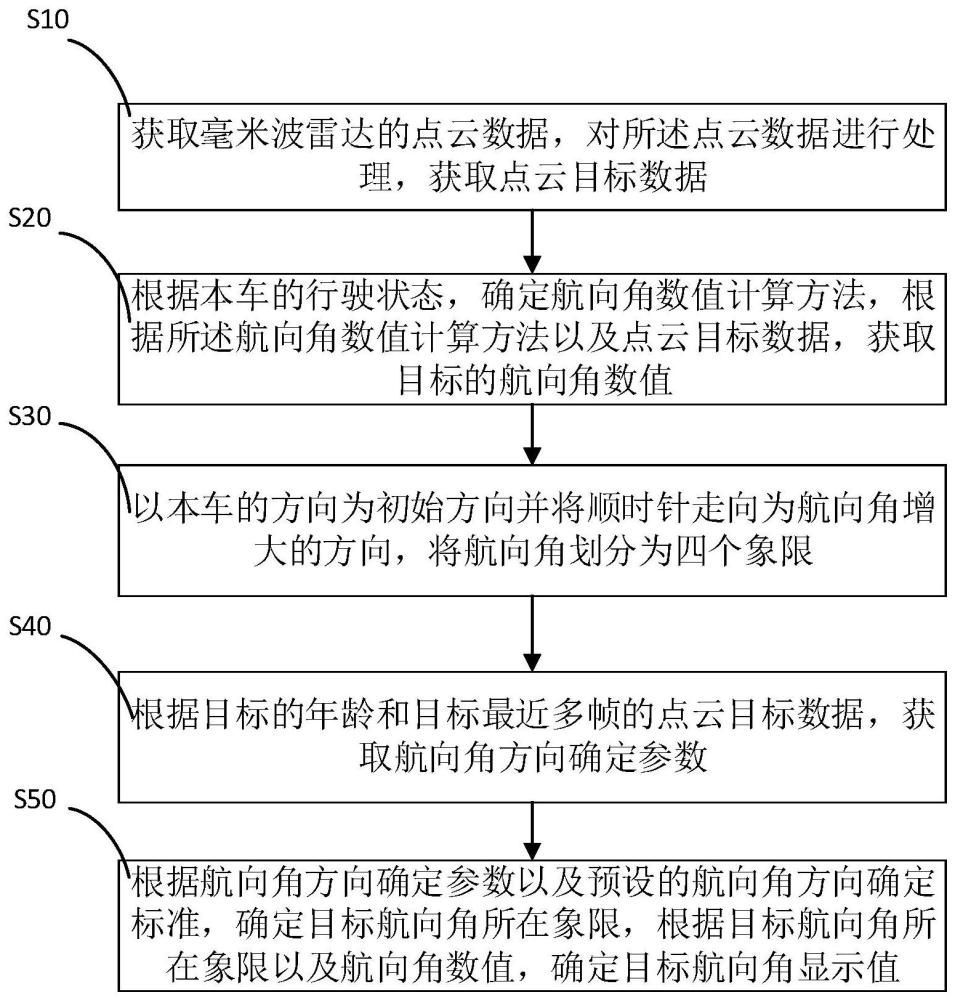
一种毫米波雷达的目标航向角确定方法与流程
本发明涉及毫米波雷达信号处理领域,尤其涉及一种毫米波雷达的目标航向角确定方法。背景技术:1、普通毫米波雷达由于水平角度分辨率不够小,目标点云密度不足,因此输出的目标航向角一般误差都较大,在多传感器融合......
技术新讯 > 航向 > 列表
 2024-09-11
2024-09-11精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -
一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01