一种基于推力控制飞行的飞行器横航向增稳控制方法与流程
- 国知局
- 2024-08-01 00:16:58
本发明涉及飞行器自动控制研究领域。更具体地说,本发明涉及一种基于推力控制飞行的飞行器横航向增稳控制方法。
背景技术:
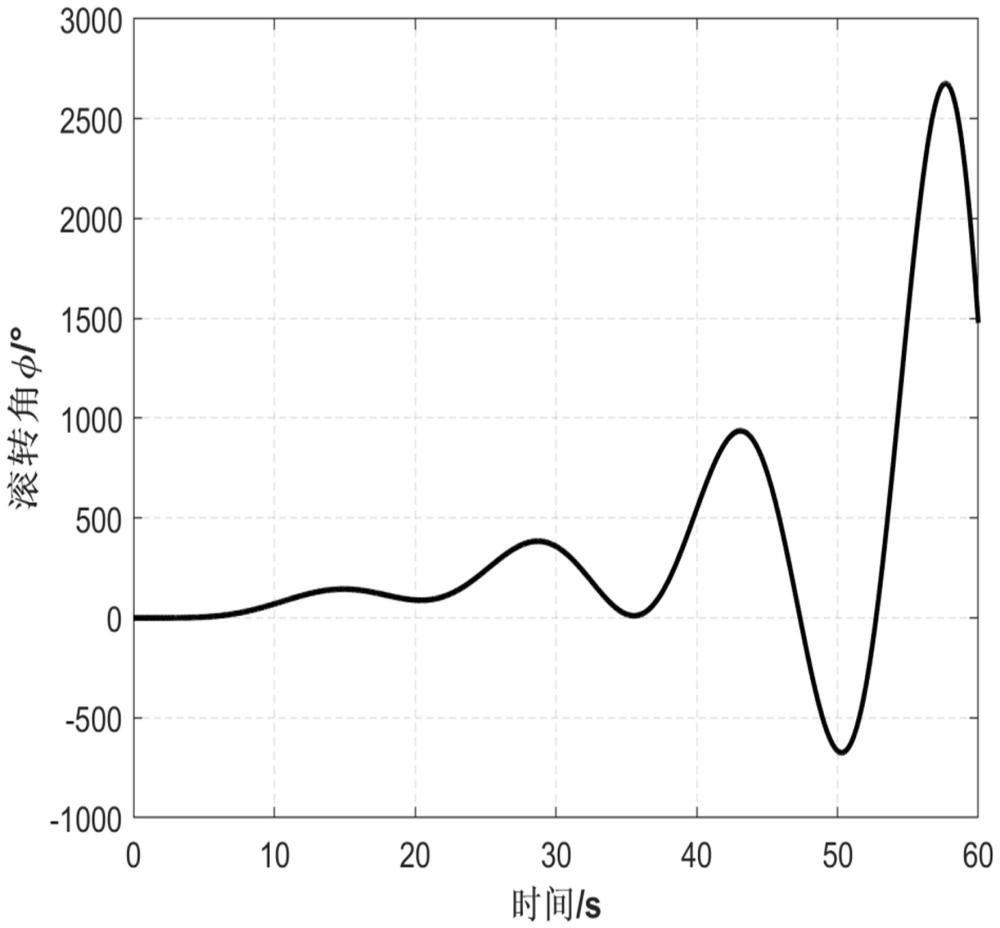
1、机械结构或液压系统故障,甚至外力破坏(如炸弹爆炸或导弹袭击)导致飞行器机体结构受损,特别是确保飞行器可控飞行的操纵舵面受损,将对于飞行安全带来严重影响,直接威胁机上人员生命安全。如何在机体机构受损情况下(如立尾损毁)对飞行器进行稳定控制,一直以来是飞行控制领域研究的热点与难点。
技术实现思路
1、本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
2、为了实现本发明的这些目的和其它优点,提供了一种基于推力控制飞行的飞行器横航向增稳控制方法,其特征在于,包括:
3、s100、在立尾受损飞行器横航向失稳失控情况下,基于发动机差动推力建立得到飞行器动力学模型,基于发动机推力迟滞建立得到发动机动力学模型;
4、s200、对飞行器动力学模型和发动机动力学模型进行联立设计,得到飞控系统设计模型,确定在立尾受损情况下能实现恢复横航向稳定的控制输入。
5、优选的是,在s100中,在立尾受损情况下,如下的飞行器动力学模型是基于小扰动假定,在给定特征点线性化飞行器横航向动力学方程而得到:
6、
7、上式中,表示滚转角, p表示滚转角速度, β表示侧滑角, r表示侧滑角速度, δ a表示副翼舵偏;
8、 l p、 l β、 l r、分别表示滚转力矩对于滚转角速度 p、侧滑角 β、侧滑角速度 r和副翼舵偏 δ a的气动导数;
9、 y p、 y β、 y r、分别表示侧力对于滚转角速度 p、侧滑角 β、侧滑角速度 r和副翼舵偏 δ a的气动导数,且;
10、 n p、 n β、 n r、分别表示偏航力矩对于滚转角速度 p、侧滑角 β、侧滑角速度 r和副翼舵偏 δ a的气动导数;
11、 t l、 t r分别表示左右发动机推力, δ t表示左右发动机的差动推力,且 δ t =t l- t r;
12、 i xx、 i zz分别表示飞行器沿其体轴 x轴和 z轴的转动惯量, i xz表示飞行器对 x轴和 z轴的惯性积, y e表示发动机至飞行器质心距离, g表示重力加速度, v表示特征点飞行速度, γ表表示特征点航迹偏角;
13、符号上一点表示对应符号的一阶导数。
14、优选的是,在s100中,在立尾受损情况下,如下的发动机动力学模型是基于发动机推力迟滞,将发动机动力学特性近似建模为时延二阶线性模型得到:
15、
16、上式中, t表示发动机产生推力, t c表示发动机推力指令, ξ、 ω分别表示发动机二阶线性模型阻尼和带宽频率, t d表示时延参数, t表示时间,符号上的两点表示对应符号的二阶导数。
17、优选的是,在s200中,所述飞控系统设计模型为:
18、
19、上式中, x表示飞控系统设计模型的系统状态,且, u表示控制输入,且, y表示控制输出,且,飞控系统设计模型的系统矩阵 a、 b、 c满足如下条件:
20、。
21、优选的是,在s200中,飞控系统设计模型中控制输入 u的获取公式为:
22、 u=- kx
23、上式中, k表示控制增益矩阵,且 k通过如下方式确定:
24、对飞控系统设计模型设计如下的性能指标函数 j:
25、
26、上式中, q为正定对称的状态权重矩阵, r为控制成本矩阵,通过最小化性能指标函数 j计算确定控制增益矩阵 k。
27、本发明至少包括以下有益效果:本发明公开了一种基于推力控制飞行的飞行器横航向增稳控制方法,可在飞行器立尾损毁情况下,利用发动机反推动力进行差动控制,改善飞行器横航向不稳定特性,确保飞行器横航向稳定。
28、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200434.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表