一种遥操控水下机器人系统的自主作业PID位姿控制模式的控制方法
- 国知局
- 2024-08-01 00:16:54
本发明涉及机器人控制,具体为一种遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法。
背景技术:
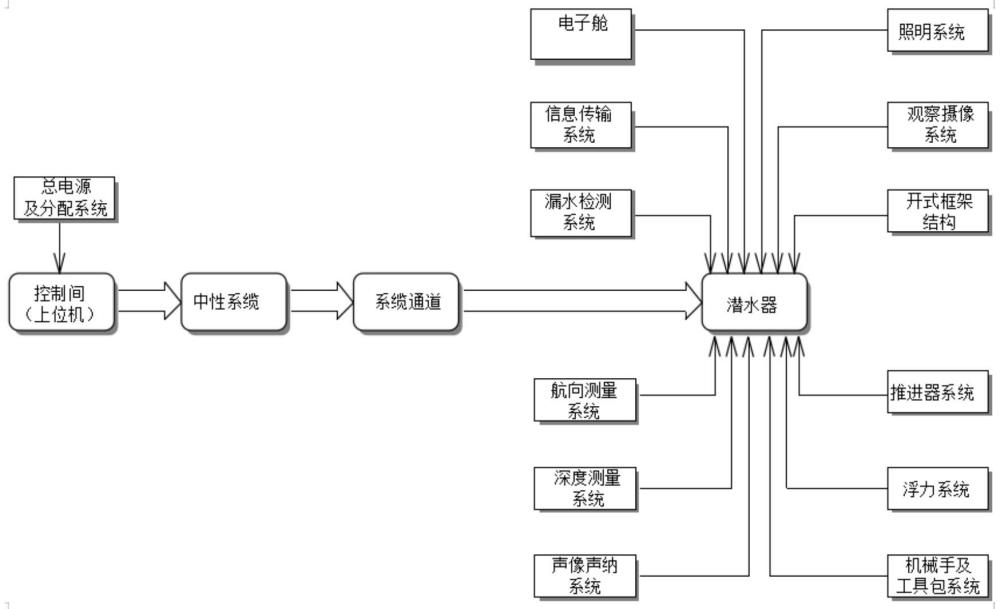
1、对比于自主水下机器人(auv)高精度精确的实时定位系统,rovs由于以手柄遥操控的水下机器人系统,所携带的导航系统定位精度不高,约束了rovs水下自主作业的领域,故rovs自主作业能力相对auv系统较弱。然而,rovs结构设计为其水下作业灵活性与可靠性提供了诸多优势:①rovs可在有限空间内搭载相对较多的探测设备;②rovs可通过脐带缆实现水下与水面的实时通;③rovs陆上控制平台的人机界面,可实时反馈水下作业环境、执行情况等。为了保持rovs诸多优势,提升水下作业的自主性,该类水下机器人系统自主作业的任务需求提上日程。
2、目前关于rovs自主完成水下作业的研究多以理论研究模拟为主。
技术实现思路
1、本发明解决的技术问题提出一种遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法,在不改变rovs硬件设备基础上,通过改进rovs底层控制软件部分提升rovs自主作业能力,本发明分析rovs系统控制执行机构特点,设置了一种自整定调整参数的pid控制法,避免了rovs控制模型的构建,且实现了rovs摆脱手柄操作自主完成水下作业的能力,本发明的目的在于克服rovs位姿运动对手柄遥操控的依赖性,在现有定位导航系统精度不高情况下,采用一种自整定pid控制+补偿器法,提升rovs自主水下作业的能力。该方法具有所有控制参数可自调整,自适应于被控对象等特点。
2、为实现上述目的,本发明提供如下技术方案:一种遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法,包括以下步骤:
3、s1、rovs陆上控制平台将系统由手柄控制模式转为自主作业控制模式;
4、s2、预设rovs期望位姿水下深度、航向角度;
5、s3、调用rovs自主作业位姿控制系统;
6、s4、调用pid控制策略,根据位姿偏差自整定pid控制参数进行,
7、其中陆上控制平台是rovs组成部分之一,主要用于反馈搭载传感器、水下作业环境与位姿状况,位姿控制-rovs是指rovs水下深度、航向角度。
8、所述的rovs陆上控制平台将系统由手柄控制模式转为自主作业控制模式,自主作业控制模式为rovs脱离手柄控制,自主执行水下作业。
9、所述步骤s3中位姿控制是指步骤s2中的水下深度、航向角度。
10、所述步骤s4中位姿偏差是指rovs实际位姿与期望位姿间偏差,pid控制参数是指比例控制参数、积分控制参数与微分控制参数。
11、步骤s4中自整定pid控制参数是指其控制参数根据位姿偏差大小按一定比例自动调整。
12、本发明的有益效果是:本发明提供的一种遥操控水下机器人的自主作业控制模式,能够使水下机器人稳定的、可靠的进行航向和深度运动,保证水下机器人自动按照指定航向和深度运行,脱离手柄对其控制,实现航向运动自主作业。rovs水面试验表明所提自整定pid控制+补偿器法对外界环境具有较强的抗干扰能力,水下试验表明该控制算法具有无超调、响应快且静态误差小等特点,保证了系统航向运动的控制品质。
技术特征:1.一种遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法,其特征在于:所述步骤s4中,位姿偏差是指rovs实际位姿与期望位姿间偏差,pid控制参数是指比例控制参数、积分控制参数与微分控制参数。
3.根据权利要求1所述的遥操控水下机器人系统的自主作业pid位姿控制模式的控制方法,其特征在于:所述步骤s4中,依据位姿误差大小可以自整定pid控制参数,依据静态误差动态调整补偿器,该方法包含以下步骤:
技术总结本发明公开了一种遥操控水下机器人系统的自主作业PID位姿控制模式的控制方法,包括以下步骤:S1、ROVS陆上控制平台将系统由手柄控制模式转为自主作业控制模式;S2、预设ROVS期望位姿水下深度、航向角度;S3、调用ROVS自主作业位姿控制系统;S4、调用PID控制策略,根据位姿偏差自整定PID控制参数进行。该方法提供的一种遥操控水下机器人的自主作业控制模式,能够使水下机器人稳定的、可靠的进行航向运动,保证水下机器人自动按照指定航向运行,脱离手柄对其控制,实现航向运动自主作业。技术研发人员:周焕银,李国虎,万程,刘金生受保护的技术使用者:东华理工大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200422.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表